Procedimiento y disposición para desarrollar un modelo tridimensional de un entorno.
Procedimiento (1000, 1100) para desarrollar un modelo 3D de un entorno,
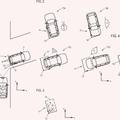
que comprende las etapas de: proporcionar una pluralidad de imágenes superpuestas del entorno (1010, 1110), cada imagen está asociada a datos de navegación, los datos de navegación comprenden información de posición y una dirección de orientación de una cámara que captura las imágenes en cada instante de captura;
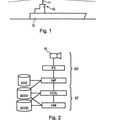
proporcionar información de distancia (1020, 1120) mediante un dispositivo de medición de distancia, dicha información de distancia comprende un valor de distancia y datos de navegación asociados a cada una de una pluralidad de mediciones de distancia, los datos de navegación que comprenden información de posición y la dirección de pulsos transmitidos por dicho dispositivo de medición de distancia para la reflexión en el entorno; desarrollo (1030, 1130) del modelo 3D en base a la pluralidad de imágenes superpuestas y la información de distancia;
caracterizado porque
la etapa de desarrollo (1030, 1130) del modelo 3D comprende las etapas de proporcionar (1031) el modelo 3D en base a la pluralidad de imágenes superpuestas; y
actualizar (1034) el modelo 3D con la información de distancia usando un proceso iterativo, en el que el desarrollo del modelo 3D comprende comparar el modelo 3D con información del dispositivo de medición de distancia, actualizar el modelo 3D en partes del modelo 3D donde existe una discrepancia entre el modelo 3D y la información de las mediciones de distancia, en base a la información de distancia, y verificar que las partes del modelo 3D actualizadas en base a la información de distancia describan mejor la realidad que el modelo 3D correspondiente no actualizado con la información de distancia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2013/050044.
Solicitante: Vricon Systems Aktiebolag.
Inventor/es: ANDERSSON, INGMAR, HAGLUND,LEIF, ISAKSSON,FOLKE, BORG,JOHAN, CARLBOM,PER, BEJERYD,JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C11/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 11/00 Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica. › mediante la comparación de dos o más fotografías de la misma zona.
- G01S17/02 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S17/42 G01S 17/00 […] › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
- G01S17/93 G01S 17/00 […] › como anti-colisión.
- G06T17/05 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 17/00 modelado 3D mediante gráficos de computdor. › Modelos geográficos.
- G06T19/20 G06T […] › G06T 19/00 Manipulación de modelos 3D modelos o imágenes para gráficos de computador. › Edición de imágenes 3D, p. ej. cambio de formas o de colores, alineación de objetos o posicionado de partes.
PDF original: ES-2693785_T3.pdf
Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Luna con campo sensor ópticamente transparente, del 1 de Junio de 2016, de SAINT-GOBAIN GLASS FRANCE: Luna en forma de luna de parabrisas, o bien de una luna trasera de un vehículo, con un campo sensor ópticamente transparente, comprendiendo: a) al menos una […]
 Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
 SISTEMA DE ALERTA ANTICOLISION PARA VEHICULO MARINO Y PROCEDIMIENTO DE ANALISIS ANTICOLISION, del 1 de Noviembre de 2008, de SEA ON LINE: Sistema de alerta anticolisión para vehículo marino , que comprende: - al menos un transductor que cubre al menos parcialmente el horizonte del vehículo marino, […]
SISTEMA DE ALERTA ANTICOLISION PARA VEHICULO MARINO Y PROCEDIMIENTO DE ANALISIS ANTICOLISION, del 1 de Noviembre de 2008, de SEA ON LINE: Sistema de alerta anticolisión para vehículo marino , que comprende: - al menos un transductor que cubre al menos parcialmente el horizonte del vehículo marino, […]