PROCESO DE EQUILIBRADO EN MÚLTIPLES EJES.
Un método (200) para el equilibrado de una aeronave (100), comprendiendo el método:
la determinación generalmente de modo simultáneo (300, 400) de los valores de una pluralidad de variables de equilibrado en una pluralidad de grados de libertad (114), caracterizado por la determinación generalmente de modo simultáneo de valores para una pluralidad de variables de equilibrado mediante la realización de la búsqueda en múltiples ejes para los valores de equilibrado y usando el método de extrapolación de múltiples ejes, en el que la búsqueda en múltiples ejes para los valores de equilibrado usa un método de eliminación gaussiano de pivote tras el uso de la construcción de una matriz Jacobiana inicial con diferencias finitas o el algoritmo de búsqueda de líneas y la matriz Jacobiana con la actualización de Boyden
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07254897.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: LUO,JIA.
Fecha de Publicación: .
Fecha Solicitud PCT: 17 de Diciembre de 2007.
Fecha Concesión Europea: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G05D1/08B
Clasificación PCT:
- G05D1/08 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
ANTECEDENTES
Esta descripción se refiere de modo general a la aeronáutica y, más particularmente, a un método y un sistema para la determinación de las soluciones de equilibrado de una aeronave substancialmente de modo simultáneo en seis grados de libertad.
Las superficies de control de vuelo y el empuje del motor de una aeronave se ajustan para mantener una condición de vuelo deseada descrita por la altitud, velocidad, actitud y rumbo de la aeronave, así como para efectuar algunos cambios deseados en la altitud, velocidad, actitud y rumbo. Típicamente, las superficies de control de vuelo se equilibran para proporcionar un vuelo recto y nivelado.
El equilibrado se puede usar para compensar factores tales como descompensaciones o desplazamientos de la carga (gente, carga y combustible) y los vientos que de otra forma alterarían indeseablemente la altitud, velocidad, actitud y rumbo del aeroplano, así como la asimetría en el empuje debida a un fallo de motor. Por ejemplo, el equilibrado se puede usar para compensar una desproporción en la distribución del peso de la carga que de otra forma haría que el aeroplano alabease indeseablemente a un lado. De modo similar, el equilibrado se puede usar para compensar un viento lateral que de otra forma haría que el aeroplano guiñase de modo indeseable separándose de su rumbo deseado.
Más particularmente, cuando la aeronave está tendiendo a alabear a un lado, se pueden mover los alerones y los spoilers a una posición que devuelve la aeronave a un vuelo nivelado. De modo similar, si la aeronave es llevada por el viento fuera de su curso, se puede mover un timón de dirección de modo que se mantenga el rumbo deseado.
Las superficies de control en aeronaves más pequeñas se pueden posicionar manualmente, tal como mediante el uso de sistemas mecánicos accionados por el piloto, por ejemplo, cables y poleas. Sin embargo, las aeronaves más grandes requieren generalmente superficies de control accionadas por motor eléctrico o hidráulicamente. En algunas aeronaves, tales como aquellas con sistemas de control de vuelo incrementados (vuelo por hilos), un sistema de equilibrado automático intenta mantener la deseada altitud, velocidad, actitud y rumbo de la aeronave con la mínima intervención del piloto.
Los simuladores de vuelo son importantes herramientas que se usan extensivamente por la industria de líneas aéreas y los militares para entrenamiento de pilotos y simulación de desastres y por los fabricantes de aeronaves para el desarrollo de las aeronaves. Uno de los aspectos más importantes de los simuladores de vuelo es el sistema y método de equilibrado.
Aunque los sistemas de equilibrado contemporáneos han probado en general su utilidad para la finalidad que se busca, tales sistemas contemporáneos sufren de deficiencias inherentes que pueden desmerecer su utilidad y atractivo. Esto es particularmente verdadero para aeronaves modernas que tienen una dinámica altamente no lineal y altamente acoplada o sistemas de control de vuelo que están incrementados. Esto puede ser también verdadero cuando tal sistema sigue una ley de control p-beta, que introduce sistemas altamente incrementados y acoplamientos del sistema significativos entre el control de alabeo/guiñada y el movimiento de alabeo/guiñada. Como resultado ciertas variables de equilibrado han trasladado su influencia sobre el movimiento de la aeronave de un eje a otro eje.
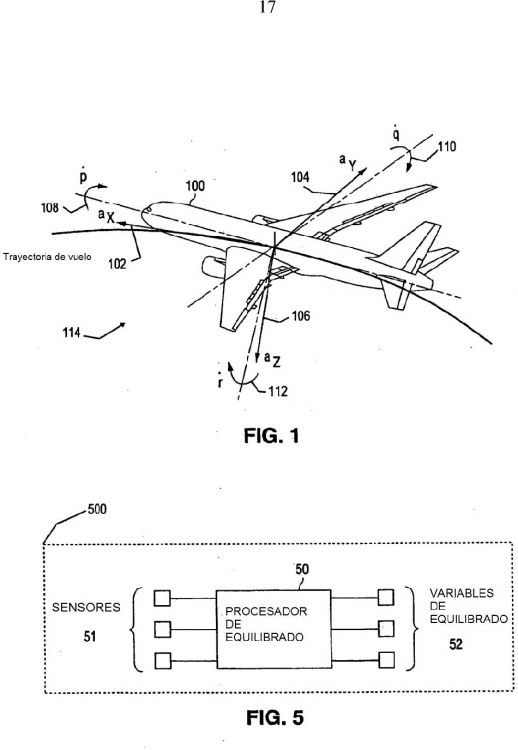
Los sistemas de equilibrado determinan las variables de equilibrado tales como los ángulos de ataque y deslizamiento lateral, ángulo de la trayectoria de vuelo, entrada de columna, entrada de pedal, entrada de rueda y posición de gases para accionar tanto las aceleraciones angulares (cabeceo, alabeo y guiñada) como las aceleraciones lineales del punto de masa (aceleración tangencial y aceleración centrípeta) a valores objetivo (que típicamente son cero).
Sin embargo, el proceso de equilibrado contemporáneo es un proceso en un único eje. Esto es, las variables de equilibrado se determinan una cada vez para accionar una aceleración única que corresponde a una única variable de equilibrado. Por ejemplo, el ángulo de deslizamiento lateral se puede usar para llevar la aceleración de guiñada a cero (manteniendo de ese modo un rumbo deseado). Después de que la aceleración de guiñada se haya llevado a cero, entonces se puede usar una variable de equilibrado diferente para llevar su correspondiente aceleración a cero, y así sucesivamente.
En esta forma, los sistemas de equilibrado contemporáneos dan la solución para una variable de equilibrado llevando una aceleración a su valor objetivo cada vez. Después de que el sistema de equilibrado determina una solución de equilibrado para un primer eje o aceleración, entonces el sistema de equilibrado se traslada a un segundo eje y así equilibra el segundo eje usando una variable de equilibrado diferente. Sin embargo, una vez que se obtiene el equilibrado a lo largo del segundo eje, la aceleración previamente equilibrada a lo largo del primer eje típicamente se vuelve desequilibrada. Por ello, se debe volver a equilibrar el primer eje.
La aceleración previamente equilibrada a lo largo del primer eje se vuelve típicamente desequilibrada después de que se alcanza un equilibrado a lo largo del segundo eje debido a los fuertes acoplamientos de los sistemas dinámicos involucrados. Este efecto no deseable necesita un equilibrado iterativo, que es inherentemente ineficiente. Esto es, cada grado de libertad debe ser repetidamente vuelto a equilibrar hasta que todos los grados de libertad están dentro de las tolerancias deseadas. Tal equilibrado iterativo no es deseablemente robusto y a menudo no consigue producir una solución de equilibrado cuando la aeronave está cerca de los límites de la envolvente de vuelo y del control de vuelo.
Uno de los límites de vuelo es la velocidad más baja a la que una aeronave puede permanecer equilibrada tanto con el pedal como con la entrada de rueda en sus límites mecánicos. Cuando la aeronave está cerca de su velocidad límite con la entrada de pedal máxima, la rueda se convierte en inefectiva en el control del momento de alabeo. El ángulo de deslizamiento lateral puede controlar aún de modo efectivo las aceleraciones tanto en los ejes de alabeo como de guiñada. Los sistemas de equilibrado contemporáneos a menudo fallan tratando de encontrar las soluciones de equilibrado en estos límites.
Adicionalmente, aunque las leyes de control p-beta de algunas aeronaves modernas eliminan la dependencia de la aceleración lateral o ángulo de inclinación, añaden una dependencia de la aceleración de guiñada en el ángulo de inclinación. Este nuevo desplazamiento en la dependencia de la aceleración hace a los procesos de equilibrado en eje único contemporáneos ineficaces.
Como resultado, hay una necesidad de un sistema de equilibrado que determine generalmente de modo simultáneo valores para las variables de equilibrado en una pluralidad de grados de libertad diferentes de modo que mitiguen en forma sustancial los aspectos iterativos de los sistemas de equilibrado contemporáneos y de ese modo mejoren la eficiencia y proporcionen un sistema de equilibrado más robusto.
Estos objetivos se consiguen mediante el método de la reivindicación 1 y el sistema de la reivindicación 8.
El documento US 2003/0106958 describe un sistema de incremento de equilibrado para una aeronave de alas giratorias que tiene un algoritmo de incremento de equilibrado que proporciona el incremento del equilibrado del giro por medio de una entrada de la palanca de mando en un eje y la transferencia del equilibrado automática en ejes cruzados como una función del grado de guiñada comandado.
El documento US 2005/0051666 describe una aeronave con un control de centro de gravedad activo en el que un controlador puede transferir el combustible entre una pluralidad de tanques de combustible y ajustar el centro de gravedad de la aeronave para reducir la carga del equilibrado.
SUMARIO
Se describen en el presente documento los sistemas y métodos para proporcionar el equilibrado de un vehículo, tal como una aeronave. De acuerdo con un ejemplo de una realización, un método para proporcionar el equilibrado comprende la determinación generalmente de modo simultáneo de una pluralidad de variables de equilibrado en una pluralidad de grados de libertad.
De acuerdo con un ejemplo de una realización, un sistema para proporcionar un equilibrado comprende...
Reivindicaciones:
1. Un método (200) para el equilibrado de una aeronave (100), comprendiendo el método:
la determinación generalmente de modo simultáneo (300, 400) de los valores de una pluralidad de variables de equilibrado en una pluralidad de grados de libertad (114), caracterizado por la determinación generalmente de modo simultáneo de valores para una pluralidad de variables de equilibrado mediante la realización de la búsqueda en múltiples ejes para los valores de equilibrado y usando el método de extrapolación de múltiples ejes, en el que la búsqueda en múltiples ejes para los valores de equilibrado usa un método de eliminación gaussiano de pivote tras el uso de la construcción de una matriz Jacobiana inicial con diferencias finitas o el algoritmo de búsqueda de líneas y la matriz Jacobiana con la actualización de Boyden.
2. El método de acuerdo con la enumeración de la reivindicación 1, en el que los valores de equilibrado se determina generalmente de modo simultáneo en seis grados de libertad.
3. El método de acuerdo con la enumeración de la reivindicación 1, en el que los valores de equilibrado se determinan para al menos una de entre la aerodinámica no lineal, las aceleraciones lineales objetivo y las aceleraciones angulares objetivo.
4. El método de acuerdo con la enumeración de la reivindicación 1, en el que se considera el acoplamiento de múltiples ejes en la determinación de los valores de equilibrado.
5. El método de acuerdo con la enumeración de la reivindicación 1, que comprende además proporcionar al menos alguna de entre los valores de equilibrado determinados para un sistema incrementado de control de vuelo
500.
6. El método de acuerdo con la enumeración de la reivindicación 1, en el que la determinación generalmente de modo simultáneo de los valores para
una pluralidad de variables de equilibrado comprende el uso de valores representativos del estado aerodinámico, la posición inercial, la actitud, el control de vuelo y la propulsión generalmente de modo simultáneo para determinar los valores de equilibrado.
7. El método de acuerdo con la enumeración de la reivindicación 1, en el que la determinación generalmente de modo simultáneo de los valores para una pluralidad de variables de equilibrado comprende el uso de valores representativos del estado aerodinámico, la posición inercial, la actitud, el control de vuelo y la propulsión generalmente de modo simultáneo para determinar los valores de equilibrado los límites de la envolvente de vuelo y en los límites del control de vuelo.
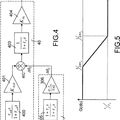
8. Un sistema para proporcionar valores de equilibrado, comprendiendo el
sistema:
una pluralidad de sensores (51); y
un procesador (50) configurado para usar la información proporcionada
por los sensores para determinar generalmente de modo simultáneo los valores para una pluralidad de variables de equilibrado (52) en una pluralidad de grados de libertad (114), caracterizado por la determinación generalmente de modo simultáneo de valores para una pluralidad de variables de equilibrado mediante la realización de la búsqueda en múltiples ejes para los valores de equilibrado y usando el método de extrapolación de múltiples ejes, en el que la búsqueda en múltiples ejes para los valores de equilibrado usa un método de eliminación gaussiano de pivote tras el uso de la construcción de una matriz Jacobiana inicial con diferencias finitas o el algoritmo de búsqueda de líneas y la matriz Jacobiana con la actualización de Boyden.
9. El sistema de acuerdo con la enumeración de la reivindicación 8, en el que el procesador se configura para determinar los valores de equilibrado para una aeronave (100).
10. El sistema de acuerdo con la enumeración de la reivindicación 8, en el que el procesador se configura para determinar los valores de equilibrado generalmente de modo simultáneo en seis grados de libertad, y en el que los
seis grados de libertad incluyen una aceleración tangencial (102), una aceleración centrípeta lateral (104), una aceleración centrípeta vertical (106), una aceleración de alabeo (108), una aceleración de cabeceo (110) y una aceleración de guiñada (112).
11. El sistema de acuerdo con la enumeración de la reivindicación 8, en el que el procesador se configura para determinar los valores de equilibrado para al menos una de entre la aerodinámica no lineal, las aceleraciones lineales y las aceleraciones angulares objetivo.
12. El sistema de acuerdo con la enumeración de la reivindicación 8, en el que el procesador se configura para determinar los valores de equilibrado de acuerdo con una ley de control p-beta.
Patentes similares o relacionadas:
 CONVERTIDOR DE ORDEN DE FACTOR DE CARGA EN INSTRUCCION DE VARIACION DE ACTITUD LONGITUDINAL, del 21 de Mayo de 2010, de THALES: Convertidor, para aeronave, de orden en factor de carga Nzc en instrucción de variación de actitud longitudinal ??c que comprende un circuito generador de variación […]
CONVERTIDOR DE ORDEN DE FACTOR DE CARGA EN INSTRUCCION DE VARIACION DE ACTITUD LONGITUDINAL, del 21 de Mayo de 2010, de THALES: Convertidor, para aeronave, de orden en factor de carga Nzc en instrucción de variación de actitud longitudinal ??c que comprende un circuito generador de variación […]
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático, del 11 de Marzo de 2020, de SCHOTTEL GMBH: Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Filtro de Kalman modificado para la generación de correcciones de error de actitud, del 5 de Junio de 2019, de THE BOEING COMPANY: Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador: […]
Sistema de formación de imágenes espaciales en tres dimensiones, del 3 de Junio de 2019, de THALES: Sistema de formación de imágenes espaciales en tres dimensiones que comprende: - al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo […]
 Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un método, que comprende: monitorizar una característica de balanceo de una aeronave ; determinar una salida de un sistema de piloto automático […]