CONVERTIDOR DE ORDEN DE FACTOR DE CARGA EN INSTRUCCION DE VARIACION DE ACTITUD LONGITUDINAL.
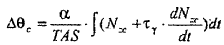
Convertidor, para aeronave, de orden en factor de carga Nzc en instrucción de variación de actitud longitudinal ??c que comprende un circuito (30) generador de variación de actitud longitudinal con un integrador (301,
302, 303) de ganancia variable que aplica la relación de mecánica del vuelo que relaciona el factor de carga Nzc con la variación de actitud longitudinal ??c:
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/056125.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS,92200 NEUILLY SUR SEINE.
Inventor/es: RIEDINGER, MARC.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01C23/00A
- G05D1/08B
Clasificación PCT:
- B64C13/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 13/00 Sistemas de control o sistemas de transmisión para la actuación de superficies de control de vuelo, flaps hipersustentadores, aerofrenos, o desprendedores de capa límite (spoilers). › accionados automáticamente, p. ej. que responden a detectores de ráfagas.
- G01C23/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
- G05D1/06 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
Fragmento de la descripción:
Convertidor de orden de factor de carga en instrucción de variación de actitud longitudinal.
La invención se refiere a la aviónica y, más concretamente, a los sistemas de control de vuelo que garantizan las funciones de piloto automático y de director de vuelo.
Los sistemas de control de vuelo son automatismos que permiten, en sus modos de funcionamiento básicos, llevar y mantener una aeronave en una configuración de vuelo correspondiente a un vector velocidad y/o actitud predeterminados, y, en modos de funcionamiento denominados "superiores" llevar una aeronave por un tipo de trayectoria predefinida. Actúan sobre los mandos de vuelo, o bien directamente, cuando funcionan con piloto automático, o bien por medio del piloto al que proporcionan instrucciones, cuando funcionan como director de vuelo. Contienen calculadores programados para estimar las variaciones que existen entre la actitud, el vector velocidad o la trayectoria actual de la aeronave con respecto a una actitud, un vector velocidad o una trayectoria de instrucción y para deducir a partir de esto las órdenes que deben ejecutar los mandos de vuelo o el sentido y la amplitud de las maniobras que van a aconsejarse al piloto para reducir estas variaciones.
Para emular lo más posible el comportamiento de un piloto, los sistemas de control de vuelo están diseñados con dos niveles de bucles de control: un primer nivel de bucles de control denominado "bucle mayor" que determina los valores que deben adoptar los parámetros primarios de vuelo utilizados por los pilotos para un vuelo instrumental para llegar a la altitud, al vector velocidad o a la trayectoria correctos, y un segundo nivel de bucles de control denominado "bucle menor" que traduce los valores de parámetros suministrados por el bucle mayor, o bien en órdenes para los accionadores controlados por los mandos de vuelo para un funcionamiento con piloto automático, o bien indicaciones de variación que hay que corregir que se visualizan en la cabina de mando, en la pantalla PFD de visualización de los parámetros primarios de vuelo para un funcionamiento con director de vuelo.
Con los mandos de vuelo clásicos, con simple asistencia mecánica, hidráulica y/o eléctrica, que comprenden una palanca que permite al piloto imponer la posición de los controles y que aceptan el ángulo de actitud longitudinal como parámetro primario de control en el plano vertical, los sistemas de control de vuelo comprenden, para el control de los parámetros de trayectoria en sus diferentes modos de funcionamiento, bucles mayores que suministran órdenes en ángulo de actitud longitudinal aprovechadas por los bucles menores que suministran, en funcionamiento con piloto automático, las señales de accionamiento de los mandos y, en funcionamiento con director de vuelo, una instrucción de actitud longitudinal puesta a disposición del piloto en la pantalla PFD.
Con los mandos de vuelo eléctricos (fly-by-wire) que comprenden una palanca o mango que permite al piloto introducir, según el eje vertical, instrucciones de factor de carga asimilado posteriormente a una aceleración vertical aunque rigurosamente, un coeficiente en coseno debido al ángulo de balanceo interviene en la relación que los une y por tanto que admite el factor de carga como parámetro primario de vuelo en lugar del ángulo de actitud longitudinal, los sistemas de control de vuelo comprenden, para el control de los parámetros de trayectoria en sus diferentes modos de funcionamiento, bucles mayores que suministran órdenes en factor de carga aprovechadas por los bucles menores que suministran, en funcionamiento con piloto automático, las señales de accionamiento de los mandos y, en funcionamiento con director de vuelo, una instrucción de factor de carga puesta a disposición del piloto en la pantalla PFD.
Resulta que, en un funcionamiento con piloto automático, los sistemas de control de vuelo de bucles mayores que suministran órdenes en factor de carga son más reactivos que los de bucles mayores que suministran órdenes en variación de ángulo de actitud longitudinal de modo que sería interesante adaptarlos a las órdenes de vuelo clásicas si no existiera la dificultad para un piloto de seguir una instrucción de factor de carga con mandos de vuelo clásicos más apropiados al seguimiento de instrucción de ángulo de actitud longitudinal.
El documento FR-A-2 874 204 relaciona el factor de carga y la velocidad del avión por medio de un integrador.
La presente invención tiene como objetivo resolver el problema de adaptación mencionado anteriormente dotando a un sistema de control de vuelo dotado de bucles mayores que suministran órdenes en factor de carga, de bucles menores que convierten una orden en factor de carga emitida por un bucle mayor en una instrucción de variación de actitud longitudinal destinada a ponerse a disposición de un piloto que opera con mandos de vuelo clásicos que aceptan el ángulo de actitud longitudinal como parámetro primario de vuelo en el plano vertical.
Tiene por objeto un convertidor, para aeronave, de orden en factor de carga Nzc en instrucción de variación de actitud longitudinal
siendo a=180/p un coeficiente de conversión de radianes en grados,
t? la constante de trayectoria del avión y
TAS la velocidad verdadera de la aeronave considerada,
destacable porque el circuito generador de variación de actitud longitudinal comprende además, un filtro de paso alto que restablece a largo plazo, a un valor constante, el valor de instrucción de variación de actitud longitudinal proporcionado por el integrador.
De manera ventajosa, el filtro de paso alto tiene una constante de tiempo tw del orden de 12 segundos, dependiendo del tipo de aeronave.
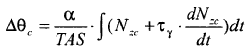
De manera ventajosa, el integrador y el filtro de paso alto se combinan en un filtro de paso de banda del primer orden que tiene una frecuencia de corte superior igual a 1/2

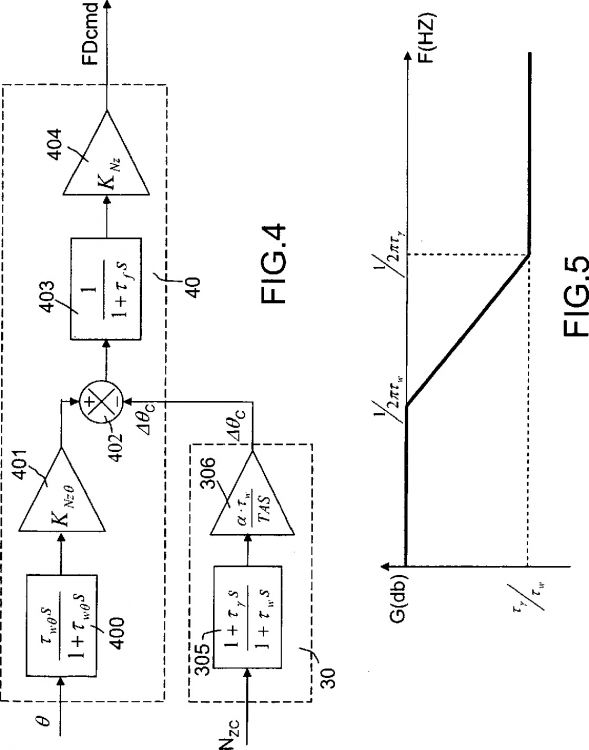
De manera ventajosa, el convertidor comprende además un circuito generador de instrucción de variación de actitud longitudinal que comprende un segundo filtro de paso alto que recibe un valor actual de ángulo de actitud longitudinal y que tiende a restablecerlo al valor nulo, un circuito sustractor con una entrada aditiva conectada a la salida del segundo filtro de paso alto y una entrada sustractiva conectada a la salida del circuito generador de variación de actitud longitudinal, y, a la salida del circuito sustractor, un filtro de paso bajo.
De manera ventajosa, el segundo filtro de paso alto tiene una constante de tiempo tw? cuyo valor es del mismo orden de magnitud que la constante de tiempo tw del filtro de paso alto del circuito generador de variación de actitud longitudinal.
De manera ventajosa, el circuito generador de instrucción de variación de actitud longitudinal comprende amplificadores-atenuadores de regulación intercalados a la salida del segundo filtro de paso alto y a la salida del filtro de paso bajo.
De manera ventajosa, el filtro de paso bajo del circuito generador de instrucción de variación de actitud longitudinal presenta una función de transferencia del primer orden con una constante de tiempo tf del orden de 0,8 s.
Otras características y ventajas de la invención se pondrán de manifiesto a partir de la descripción siguiente de un modo de realización dado a modo de ejemplo. Esta descripción se realizará respecto a los dibujos en los que:
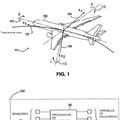
- la figura 1 es un esquema que sitúa un sistema de control de vuelo en su entorno en el interior de los equipos de una aeronave,
- la figura 2 representa una pantalla PFD de visualización de los parámetros primarios de vuelo que visualiza una barra de instrucción de actitud,
- la figura 3 es un esquema de principio de un convertidor según la invención,
Reivindicaciones:
1. Convertidor, para aeronave, de orden en factor de carga Nzc en instrucción de variación de actitud longitudinal
siendo a=180/p un coeficiente de conversión de radianes en grados,
t? la constante de trayectoria del avión, y
TAS la velocidad verdadera de la aeronave considerada,
caracterizado porque el circuito (30) generador de variación de actitud longitudinal comprende además un filtro (300) de paso alto que restablece a largo plazo, a un valor constante, el valor de instrucción de variación de actitud longitudinal proporcionado por el integrador (301, 302, 303).
2. Convertidor según la reivindicación 1, caracterizado porque la constante de tiempo
3. Convertidor según la reivindicación 1, caracterizado porque el integrador (301, 302, 303) y el filtro (300) de paso alto del generador (30) de instrucción de variación de actitud longitudinal se combinan en un filtro (305) de paso de banda del primer orden que tiene una frecuencia de corte superior igual a, 1/2

4. Convertidor según la reivindicación 3, caracterizado porque la constante de tiempo
5. Convertidor según la reivindicación 1, caracterizado porque comprende además un circuito (40) generador de instrucción de variación de actitud longitudinal que comprende un segundo filtro (400) de paso alto que recibe un valor actual de ángulo de actitud longitudinal y que tiende a restablecerlo al valor nulo, un circuito (402) sustractor con una entrada aditiva conectada a la salida del segundo filtro (400) de paso alto y una entrada sustractiva conectada a la salida del circuito (30) generador de instrucción de variación de actitud longitudinal, y, a la salida del circuito (402) sustractor, un filtro (403) de paso bajo.
6. Convertidor según la reivindicación 3, caracterizado porque el filtro (305) de paso de banda tiene una constante de tiempo
7. Convertidor según la reivindicación 6, caracterizado porque la constante de tiempo
8. Convertidor según la reivindicación 5, caracterizado porque el circuito (40) generador de instrucción de variación de actitud longitudinal comprende amplificadores-atenuadores (401, 402) de regulación intercalados a la salida del segundo filtro (400) de paso alto y a la salida del filtro (403) de paso bajo.
9. Convertidor según la reivindicación 8, caracterizado porque el segundo filtro (403) de paso bajo presenta una función de transferencia del primer orden con una constante de tiempo
Patentes similares o relacionadas:
 UN SISTEMA DE DIRECCIÓN DE DESCENSO PARA AVIONES, del 16 de Diciembre de 1960, de PIKE, EDWARD WILLIAM
LITTLE, DAVID SCOTT: Un sistema de dirección de descenso para aviones, caracterizado por un indicador de la trayectoria de descenso, medios para hacer derivar una primera señal […]
UN SISTEMA DE DIRECCIÓN DE DESCENSO PARA AVIONES, del 16 de Diciembre de 1960, de PIKE, EDWARD WILLIAM
LITTLE, DAVID SCOTT: Un sistema de dirección de descenso para aviones, caracterizado por un indicador de la trayectoria de descenso, medios para hacer derivar una primera señal […]
 PROCESO DE EQUILIBRADO EN MÚLTIPLES EJES, del 11 de Enero de 2011, de THE BOEING COMPANY: Un método para el equilibrado de una aeronave , comprendiendo el método: la determinación generalmente de modo simultáneo […]
PROCESO DE EQUILIBRADO EN MÚLTIPLES EJES, del 11 de Enero de 2011, de THE BOEING COMPANY: Un método para el equilibrado de una aeronave , comprendiendo el método: la determinación generalmente de modo simultáneo […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Método y sistema para controlar el vuelo de una aeronave sometida a al menos dos tiempos requeridos de restricciones de llegada, del 3 de Abril de 2019, de THE BOEING COMPANY: Un método para controlar el vuelo de una aeronave sometida a dos restricciones de tiempo de llegada requeridas, que comprende la etapa de: a) recibir dos tiempos […]
Sistemas y métodos para evitar que la cola de una aeronave entre en contacto con el suelo, del 8 de Enero de 2019, de THE BOEING COMPANY: Un método que comprende: determinar un perfil de descenso sobre la base de una altitud actual y una velocidad vertical actual de una aeronave […]