PROCEDIMIENTO DE CAMBIO DE MARCHA PARA UNA UNIDAD DE TRANSMISIÓN MANUAL AUTOMATIZADA Y TRANSMISIÓN AUTOMATIZADA PARA VEHÍCULO.
Proceso de cambio de marcha para una unidad de transmisión manual automatizada de un vehículo,
incluyendo dicha unidad de transmisión un embrague de rozamiento (54) y una transmisión del tipo de embrague de garras (80), incluyendo dicho proceso de cambio de marcha un control de asistencia de cambio de marcha que regula la condición de enganche del embrague de rozamiento (54), en la que, durante la parada del vehículo, el embrague de rozamiento (54) se conecta para establecer una condición de contacto de garras para aplicar una fuerza motriz rotacional a un lado de seguidor del embrague de rozamiento (54) de modo que un primer engranaje (57a) y un segundo engranaje (57b) de una transmisión del tipo de embrague de garras (80) puedan girar uno con relación a otro, donde, después del control de asistencia de cambio de marcha, la posición de embrague del embrague de rozamiento (54) es desplazada a su lado de desconexión, caracterizado porque el embrague de rozamiento (54) está conectado a una primera velocidad (A), y al llegar a una posición de embrague de referencia, el embrague de rozamiento (54) se conecta también a una segunda velocidad (B) más baja que la primera velocidad (A) para establecer la condición de contacto de garras
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09000772.
B60W10/02TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60VEHICULOS EN GENERAL. › B60WCONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de los acoplamientos de la cadena cinemática.
B60W10/10D9
B60W30/18M
F16H61/04E
Clasificación PCT:
B60W10/02B60W 10/00 […] › incluyendo el control de los acoplamientos de la cadena cinemática.
B60W30/18B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Propulsión del vehículo.
F16D48/06MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 48/00 Control externo de embragues. › Control por medios eléctricos o electrónicos, p. ej. de la presión de fluido.
F16H61/04F16 […] › F16HTRANSMISIONES. › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › Regularización del cambio de la relación.
F16H61/682F16H 61/00 […] › con interrupción del accionamiento.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
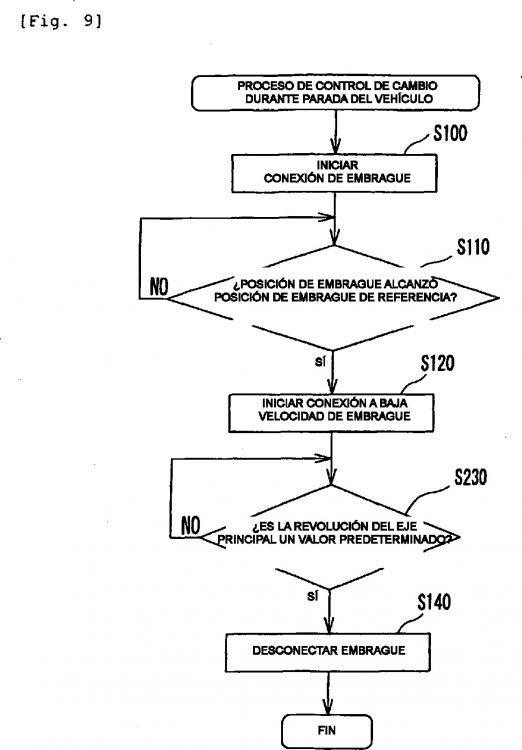
La presente invención se refiere a un proceso de cambio de marcha para una unidad de transmisión manual automatizada según el preámbulo de la reivindicación independiente 1 y una transmisión automatizada para un vehículo según el preámbulo de la reivindicación independiente 5. 5 Tal proceso de cambio de marcha para una unidad de transmisión manual automatizada de un vehículo así como dicha transmisión automatizada para un vehículo se conoce por el documento de la técnica anterior más próxima DE 103 06 934 A1. En particular, dicho documento se refiere a un proceso de cambio de marcha para determinar la condición de enganche real del embrague de rozamiento por medio de un proceso específico realizado con el vehículo en condición de parada enganchando el engranaje de marcha atrás de la transmisión. En particular, 10 dicho engranaje de marcha atrás se pone en una condición de contacto de garras de modo que los respectivos engranajes puedan girar uno con relación a otro, donde se detecta la respectiva posición de embrague asociada con dicha condición. Dicha condición de contacto de garras se determina por medio de un sensor adecuado y el embrague es movido gradualmente a distancias predeterminadas de modo que se pueda determinar un punto de enganche específico, que esté cerca de un punto de enganche real respectivo. 15 Un vehículo conocido incluye un controlador de transmisión automatizada (dispositivo de transmisión manual automatizada) que efectúa el enganche y desenganche de su embrague de rozamiento y el cambio de marcha de su transmisión del tipo de embrague de garras usando accionadores accionados eléctricamente. Según un vehículo propuesto que tiene este tipo de controlador de transmisión automatizada, el par del accionador de cambio es reducido temporalmente y posteriormente incrementado cuando los respectivos engranajes no pueden enganchar 20 uno con otro, es decir, la denominada condición de contacto de garras tiene lugar al tiempo de cambio de marcha, de modo que los engranajes puedan entrar en enganche uno con otro (por ejemplo, véase la referencia de patente 1). Referencia de patente 1: JP-A-11-082710 Sin embargo, en el controlador de transmisión automatizada según la referencia de patente 1, se aplica un volumen grande de carga de corriente a un accionador de cambio. Por lo tanto, hay que aumentar el tamaño del 25 accionador de cambio. Además, dado que se requiere el control exacto sobre la fuerza de accionamiento del accionador de cambio, el volumen de proceso de la unidad de control para el accionador de cambio aumenta. Como resultado, el tamaño y el costo de la unidad de control aumentan. Además, dado que un eje principal situado hacia arriba y un eje de accionamiento situado hacia abajo de la transmisión de embrague de garras se paran durante la parada del vehículo, la condición de contacto de garras no puede ser cancelada por el control sobre el par del accionador de cambio como en el método mostrado en la referencia de patente 1. Un objeto de la presente invención es proporcionar un proceso de cambio de marcha para una unidad de transmisión manual automatizada de un vehículo así como una transmisión automatizada para un vehículo como se ha indicado anteriormente que puede operar de forma segura y fiable. Según el aspecto de método de la presente invención, dicho objetivo se logra por un proceso de cambio de marcha para una unidad de transmisión manual automatizada de un vehículo que tiene las características de la rei- 35 vindicación independiente 1. Se exponen realizaciones preferidas en las reivindicaciones dependientes. Además, según el aspecto de aparato de la presente invención, dicho objetivo también se logra con una transmisión automatizada para un vehículo que tiene las características de la reivindicación independiente 5. Se exponen realizaciones preferidas en las reivindicaciones dependientes. La presente invención se explica a continuación con más detalle con respecto a sus varias realizaciones en 40 unión con los dibujos acompañantes, donde: 1. La figura 1 es una vista lateral de una motocicleta en una primera realización. La figura 2 ilustra una estructura de un sistema de accionamiento de la motocicleta representada en la figura La figura 3 es una vista en perspectiva de un engranaje de transmisión que constituye una transmisión del 45 tipo de embrague de garras. ES 2 355 540 T3 La figura 4 es un diagrama de bloques que representa toda la estructura de un sistema de control dispuesto en la motocicleta. La figura 5 es un diagrama de bloques que representa un grupo de sistema de accionamiento. La figura 6 es un diagrama de bloques que representa un grupo de sensores e interruptores. La figura 7 es un diagrama de flujo que representa un proceso de control de cambio de marcha durante la parada del vehículo. 2 Las figuras 8(a) y 8(b) muestran la posición de embrague con el transcurso del tiempo cuando el proceso de control de cambio de marcha se realiza durante la parada del vehículo. La figura 9 es un diagrama de flujo que representa un proceso de control de cambio de marcha durante la parada de una motocicleta en una segunda realización. La figura 10 es un diagrama de flujo que representa un proceso de control de cambio de marcha durante la 5 parada de una motocicleta en una tercera realización. Las figuras 11 (a) y 11 (b) muestran la posición de embrague con el transcurso de tiempo cuando un proceso de control de cambio de marcha se realiza durante la parada de una motocicleta en una cuarta realización. Y las figuras 12(a) y 12(b) muestran la posición de embrague con el transcurso de tiempo cuando se realiza un control de cambio de marcha durante la parada de una motocicleta en un ejemplo modificado. Figura 4 10 Motocicleta DESCRIPCIÓN DE NÚMEROS Y SIGNOS DE REFERENCIA: 11 Bastidor de carrocería de vehículo 28 Unidad de motor 43 Interruptor de cambio 43a Interruptor de cambio ascendente 43b Interruptor de cambio descendente 54 Embrague (embrague de rozamiento) 54c Chapa de rozamiento 54d Chapa de embrague 55 Eje principal 56 Sensor de revolución de eje principal 57, 59 Engranaje de transmisión 57a Primer engranaje 57b Segundo engranaje 57c Saliente de enganche 57e Concavidad de enganche 63 Accionador de embrague (accionador) 65 Accionador de cambio (accionador) 69 Sensor de velocidad del vehículo (sensor de revolución de eje de accionamiento) 70 Sensor de posición de marcha 80 Transmisión (transmisión del tipo de embrague de garras) 100 UEC (unidad de control) 90 Microordenador principal 91a Programa de control de accionador de embrague 91b Programa de control de accionador de cambio 93 Circuito de accionamiento 96 Interruptor principal ES 2 355 540 T3 3 Figura 5 Figura 6 Figura 7 Figura 8 97 Batería 98 Circuito de fuente de potencia 110 Grupo de sistema de accionamiento 120 Grupo de sensores e interruptores 110 Grupo de sistema de accionamiento 49 Accionador de estrangulador 45 Indicador 63 Accionador de embrague 65 Accionador de cambio 120 Grupo de sensores e interruptores 42 Sensor de entrada de estrangulador 43 Interruptor de cambio 50 Sensor de abertura de estrangulador 53 Sensor de revoluciones del motor 56 Sensor de revolución de eje principal 68 Sensor de posición de embrague 69 Sensor de velocidad del vehículo 70 Sensor de posición de marcha Proceso de control de cambio de marcha durante la parada de vehículo S100 Iniciar conexión de embrague S110 Posición de embrague alcanzó posición de embrague de referencia? S120 Iniciar conexión a baja velocidad de embrague S130 Cambio de marcha completado? S140 Desconectar embrague Fin Posición de embrague Segunda posición de embrague Posición de cancelación de contacto de garras (antes del uso) Posición de cancelación de contacto de garras (abrasión) Primera posición de embrague Paso de conexión de embrague Posición de embrague de referencia Paso de desconexión de embrague ES 2 355 540 T3 4 Figura 9 Figura 10 Paso de conexión a baja velocidad de embrague Tiempo Posición de engranaje Condición de contacto de garras Terminación de cambio de marcha Tiempo Proceso de control de cambio de marcha durante la parada de vehículo S100 Iniciar conexión de embrague S110 Posición de embrague alcanzó posición de embrague de referencia? S120 Iniciar conexión a baja velocidad de embrague S230 Es la revolución del eje principal un valor predeterminado? S140 Desconectar embrague Fin Proceso de control de cambio de marcha durante la parada de vehículo S100 Iniciar conexión de embrague S110 Posición de embrague alcanzó posición de embrague de referencia? S120 Iniciar conexión a baja velocidad de embrague S330 Es la diferencia entre revolución del eje principal y revolución del eje de accionamiento un valor pre- 20 determinado? Figura 11 S140 Desconectar embrague Fin Posición de embrague Segunda posición de embrague Posición de...
Reivindicaciones:
1. Proceso de cambio de marcha para una unidad de transmisión manual automatizada de un vehículo, incluyendo dicha unidad de transmisión un embrague de rozamiento (54) y una transmisión del tipo de embrague de garras (80), incluyendo dicho proceso de cambio de marcha un control de asistencia de cambio de marcha que regu- la la condición de enganche del embrague de rozamiento (54), en la que, durante la parada del vehículo, el embrague de rozamiento (54) se conecta para establecer una condición de contacto de garras para aplicar una fuerza 5 motriz rotacional a un lado de seguidor del embrague de rozamiento (54) de modo que un primer engranaje (57a) y un segundo engranaje (57b) de una transmisión del tipo de embrague de garras (80) puedan girar uno con relación a otro, donde, después del control de asistencia de cambio de marcha, la posición de embrague del embrague de rozamiento (54) es desplazada a su lado de desconexión, caracterizado porque el embrague de rozamiento (54) está conectado a una primera velocidad (A), y al llegar a una posición de embrague de referencia, el embrague de roza- 10 miento (54) se conecta también a una segunda velocidad (B) más baja que la primera velocidad (A) para establecer la condición de contacto de garras. 2. Proceso de cambio de marcha según la reivindicación 1, caracterizado porque la posición de embrague de referencia está situada entre una posición de embrague de cambio, en la que termina un estado de medio embra- 15 gue, y una segunda posición de embrague, en la que el embrague de rozamiento (54) está en un estado desenganchado mecánico máximo. 3. Proceso de cambio de marcha según la reivindicación 1 o 2, caracterizado porque la posición de embrague de referencia se establece con anterioridad en base a la posición de embrague en la que la condición de contacto de garras se cancela antes del uso del embrague de rozamiento (54). 20 4. Proceso de cambio de marcha según una de las reivindicaciones 1 a 3, caracterizado porque chapas de rozamiento (54c) y chapas de embrague (54d) del embrague de rozamiento (54) se conectan a la segunda velocidad (B) al tiempo de cambio de marcha durante la parada del vehículo. 5. Transmisión automatizada para un vehículo, incluyendo dicha transmisión automatizada un embrague de rozamiento (54), una transmisión del tipo de embrague de garras (80), un accionador eléctrico (63, 65) para enganchar y desenganchar el embrague de rozamiento (54) y llevar a cabo un cambio de marcha usando engranajes (57a, 25 57b) de la transmisión del tipo de embrague de garras (80), y una unidad de control, donde la unidad de control, al tiempo del cambio de marcha durante la parada del vehículo, está configurada para conectar el embrague de rozamiento (54) para establecer una condición de contacto de garras para aplicar una fuerza motriz rotacional a un lado de seguidor del embrague de rozamiento (54) de modo que un primer engranaje (57a) y un segundo engranaje (57b) de una transmisión del tipo de embrague de garras (80) puedan girar uno con relación a otro, donde, después del 30 control de asistencia de cambio de marcha, la unidad de control está configurada para cambiar la posición de embrague del embrague de rozamiento (54) a su lado de desconexión, caracterizada porque dicha unidad de control está configurada para conectar el embrague de rozamiento (54) a una primera velocidad (A), y al llegar a una posi- ción de embrague de referencia, para realizar un control de asistencia de cambio de marcha conectando además el embrague de rozamiento (54) a una segunda velocidad (B) más baja que la primera velocidad (A) para establecer la 35 condición de contacto de garras. 6. Transmisión automatizada según la reivindicación 5, caracterizada porque la transmisión del tipo de embrague de garras (80) incluye una pluralidad de primeros engranajes (57a) en los que se han formado salientes de enganche (57c) y una pluralidad de segundos engranajes (57b) en los que se han formado concavidades de engan- 40 che (57e) que enganchan con los salientes de enganche (57c), los salientes de enganche (57c) de los primeros engranajes (57a) enganchan con las concavidades de enganche correspondientes (57e) de los segundos engranajes (57b) para efectuar el cambio de marcha. ES 2 355 540 T3 7. Transmisión automatizada según la reivindicación 5 o 6, caracterizada porque el accionador eléctrico (63, 65) lleva a cabo la conexión y desconexión del embrague de rozamiento (54) y el cambio de marcha de la transmi- 45 sión del tipo de embrague de garras (80), y donde la unidad de control controla la operación de dicho accionador eléctrico (63, 65). 8. Transmisión automatizada según la reivindicación 6 o 7, caracterizada por un sensor de posición de marcha (70) para detectar la posición de engranaje de la transmisión del tipo de embrague de garras (80), donde la uni- dad de control realiza el control de asistencia de cambio de marcha bajo el que, al tiempo de cambio de marcha, la posición de embrague del embrague de rozamiento (54) es desplazada a un lado de conexión a la segunda veloci- 50 dad (B) más baja que la primera velocidad (A) aplicada hasta que la posición de embrague llega a la posición de embrague de referencia, y donde la posición de embrague de referencia está situada en un lado de desconexión de una primera posición de embrague donde termina una condición de medio embrague, y está situada en el lado de conexión de una segunda posición de embrague donde el embrague de rozamiento (54) está en la condición de desconexión más grande posible para su estructura, durante un período desde el tiempo en que la condición de 55 enganche entre los salientes de enganche (57c) y las concavidades de enganche (57e) de los engranajes primero y segundo (57a, 57b) es detectada por el sensor de posición de marcha (70). 9. Transmisión automatizada según una de las reivindicaciones 5 a 7, caracterizada por un sensor de revolución de eje principal (56) para detectar una revolución de un eje principal (55) conectado con el lado de seguidor del embrague de rozamiento (54), donde la unidad de control realiza el control de asistencia de cambio de marcha bajo el que, al tiempo de cambio de marcha, la posición de embrague del embrague de rozamiento (54) es desplazada a un lado de conexión a la segunda velocidad (B) más baja que la primera velocidad (A) aplicada hasta que la 5 posición de embrague llega a la posición de embrague de referencia, y donde la posición de embrague de referencia que está situada en un lado de desconexión de una primera posición de embrague donde termina una condición de medio embrague y está situada en el lado de conexión de una segunda posición de embrague donde el embrague de rozamiento (54) está en la condición de desconexión más grande posible para su estructura, durante un período desde el tiempo en que la posición de embrague llega a la posición de embrague de referencia hasta el tiempo en 10 que la revolución del eje principal (55) detectada por el sensor de revolución de eje principal (56) llega a un valor predeterminado. 10. Transmisión automatizada según una de las reivindicaciones 5 a 7, caracterizada por un sensor de revolución de eje principal (56) para detectar la revolución de un eje principal (55) conectado con el lado de seguidor del embrague de rozamiento (54), y un sensor de revolución de eje de accionamiento (69) para detectar la revolución 15 de un eje de accionamiento (58) conectado con el eje principal (55) mediante la transmisión del tipo de embrague de garras (80), donde la unidad de control realiza el control de asistencia de cambio de marcha bajo el que, al tiempo de cambio de marcha, la posición de embrague del embrague de rozamiento (54) es desplazada a un lado de conexión a la segunda velocidad (B) más baja que la primera velocidad (A) aplicada hasta que la posición de embrague llega a la posición de embrague de referencia, y donde la posición de embrague de referencia que está situada en un lado 20 de desconexión de una primera posición de embrague donde termina una condición de medio embrague y está situada en el lado de conexión de una segunda posición de embrague donde el embrague de rozamiento (54) está en la condición de desconexión más grande posible para su estructura, durante un período desde el tiempo en que la posición de embrague llega a la posición de embrague de referencia hasta el tiempo en que la diferencia entre la revolución del eje principal (55) detectada por el sensor de eje principal (56) y la revolución del eje de accionamiento 25 (58) detectada por el sensor de revolución de eje de accionamiento (69) llega a un valor predeterminado. 11. Transmisión automatizada según una de las reivindicaciones 5 a 10, donde la unidad de control desplaza la posición de embrague del embrague de rozamiento (54) a una velocidad constante al tiempo del control de asistencia de cambio de marcha. 30 12. Controlador de transmisión automatizada según una de las reivindicaciones 5 a 10, donde la unidad de control desplaza la posición de embrague del embrague de rozamiento (54) gradualmente al tiempo del control de asistencia de cambio de marcha. ES 2 355 540 T3 13. Vehículo, en particular vehículo del tipo de montar a horcajadas, que tiene una transmisión automatizada según una de las reivindicaciones 5 a 12. 16 ES 2 355 540 T3 17 ES 2 355 540 T3 18 ES 2 355 540 T3 19 ES 2 355 540 T3 ES 2 355 540 T3 21 ES 2 355 540 T3 22 ES 2 355 540 T3 23 ES 2 355 540 T3 24 ES 2 355 540 T3 ES 2 355 540 T3 26 ES 2 355 540 T3 27 ES 2 355 540 T3 28
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz:
- una caja de engranajes (GR) que […]
Tren de potencia para un vehículo, del 8 de Enero de 2020, de Alpraaz AB: Un tren de potencia para suministrar par a una rueda motriz y una rueda motriz adicional de un vehículo de carretera, en donde el tren de […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Procedimiento y dispositivo de control de la apertura/cierre de la cadena de transmisión de un vehículo que sigue a otro vehículo, del 1 de Mayo de 2019, de PSA AUTOMOBILES S.A: Procedimiento de control de la apertura/cierre de una cadena de transmisión de un primer vehículo (V) que comprende un pedal de acelerador, que comprende una etapa […]
Sistema de control de potencia de accionamiento y vehículo equipado con un sistema de control de potencia de accionamiento, del 13 de Marzo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un sistema de control de fuerza de accionamiento para uso en un vehículo, incluyendo el vehículo una fuente de accionamiento , una rueda motriz a mover por […]
Sistema de control para un vehículo, del 6 de Marzo de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de control para un vehículo , con el vehículo incluyendo un motor de combustión interna configurado para efectuar detenciones […]
Controlador de vehículo, del 21 de Febrero de 2018, de TVS Motor Company Limited: Un controlador de vehículo para un motor equipado con transmisión manual automática, que comprende un microcontrolador que genera una señal de mantenimiento de […]
Procedimiento y sistema para evitar el daño de una caja de cambios de un vehículo proporcionada con un servoembrague y un sistema de caja de cambios accionada por servocambios, del 17 de Enero de 2018, de IVECO MAGIRUS AG: Procedimiento para evitar el daño de una caja de cambios de un vehículo provista con un sistema de embrague servoaccionado y un sistema de palanca […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .