MECANISMO DE MORDAZAS DE AGARRE.
Dispositivo quirúrgico que comprende:
un conjunto de mango (13) que presenta un alojamiento (12) que define un mango estacionario (18) y un mango móvil (20),
presentando el mango móvil un mecanismo de selección de modo configurado para alternar el dispositivo quirúrgico entre un primer modo de funcionamiento y un segundo modo de funcionamiento;
incluyendo el conjunto de mango un árbol de accionamiento (90), y en el que el mecanismo de selección de modo es soportado dentro del alojamiento, siendo móvil el mecanismo de selección de modo desde un primer modo de funcionamiento acoplado al árbol de accionamiento hasta un segundo modo de funcionamiento desacoplado del árbol de accionamiento, estando asociado funcionalmente el mango móvil con el árbol de accionamiento de tal modo que el movimiento del mango móvil efectúe un movimiento axial del árbol de accionamiento, en el que, cuando el mecanismo de selección de modo está en su primer modo de funcionamiento, el árbol de accionamiento se mueve en vaivén a lo largo de un primer eje; y en el que, cuando el mecanismo de selección de modo está en su segundo modo de funcionamiento, un mecanismo de avance del árbol de accionamiento hace avanzar el árbol de accionamiento en una dirección distal;
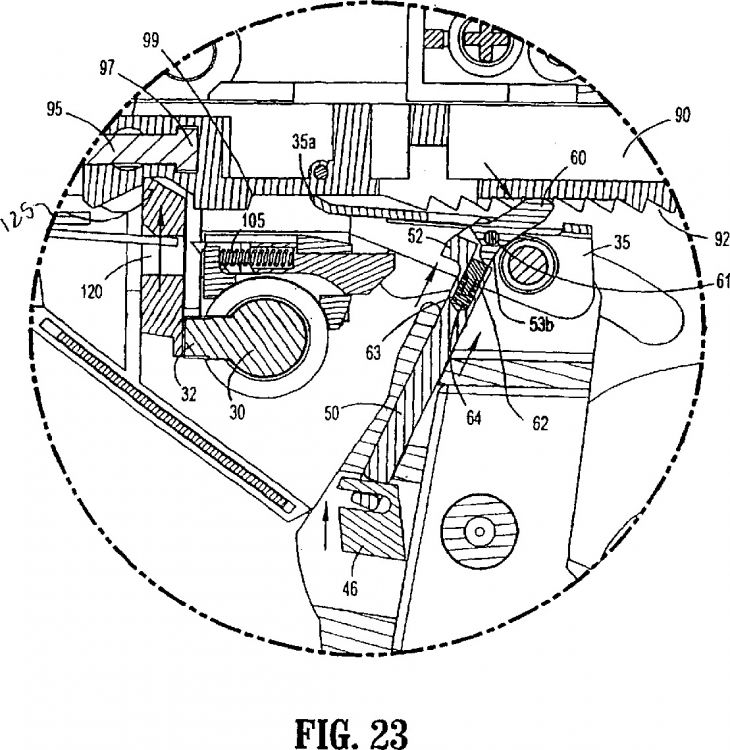
un trinquete vertical (120) posicionado de manera deslizante en una ranura (121) definida entre unas semisecciones (12a, 12b) del alojamiento, siendo móvil el trinquete vertical desde una posición extendida en la que una punta (125) del trinquete vertical encaja en un recorte (93) formado en el extremo distal del árbol de accionamiento, hasta una posición retraída en la que la punta del trinquete vertical está separada del árbol de accionamiento;
un conjunto de leva de bloqueo (107) soportado entre posiciones retraída y avanzada dentro del alojamiento; incluyendo el conjunto de leva de bloqueo un soporte y un elemento de leva (100) que tiene una punta (102); en el que un émbolo (30) es recibido dentro del alojamiento y tiene un elemento de leva (32);
en el que el elemento de leva (100) es recibido de manera deslizante en una ranura (115) definida en el soporte y el elemento de leva (100) es móvil desde una posición extendida, en la que la punta (102) del elemento de leva (100) se acopla al trinquete vertical, hasta una posición retraída; y en el que, en el primer modo de funcionamiento, la punta (102) está en la posición extendida para acoplarse al trinquete vertical con el fin de retener el trinquete vertical en su posición retraída, y, en el segundo modo de funcionamiento, el émbolo (30) es presionado de modo que el elemento de leva (32) del émbolo se acople al trinquete vertical con el fin de mover el trinquete vertical hacia la posición retraída;
un elemento alargado que se extiende distalmente desde el conjunto de mango, definiendo el elemento alargado un eje longitudinal que se extiende por toda la longitud del elemento alargado; y
un conjunto de herramienta (27) montado en la parte extrema distal del elemento alargado
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07253976.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 60 MIDDLETOWN AVENUE,NORTH HAVEN, CT 06473.
Inventor/es: SCIRICA, PAUL, A..
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Octubre de 2007.
Fecha Concesión Europea: 30 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- A61B17/068B4
- A61B17/072B
Clasificación PCT:
- A61B17/068 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Grapadoras quirúrgicas (para realizar anastomosis A61B 17/115).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Mecanismo de mordazas de agarre.
Antecedentes
La presente invención se refiere a un dispositivo de grapado quirúrgico y, más particularmente, a un dispositivo de grapado quirúrgico endoscópico configurado para hacer funcionar un conjunto de herramienta en un modo de agarre independiente de un modo de sujeción y/o de disparo.
Son bien conocidos en la técnica los dispositivos quirúrgicos en los que el tejido se agarra o se sujeta primero entre una estructura de mordazas opuestas y a continuación se une mediante sujetadores quirúrgicos. Los sujetadores tienen típicamente forma de grapas quirúrgicas, pero pueden utilizarse también sujetadores poliméricos de dos partes.
Los instrumentos para este fin pueden incluir un conjunto de herramienta con dos elementos alargados que se utilizan respectivamente para capturar o sujetar tejido. Típicamente, uno de los elementos lleva un cartucho de grapas que aloja una pluralidad de grapas dispuestas, por ejemplo, en por lo menos dos hileras laterales, mientras que el otro elemento tiene un yunque que define una superficie para formar las patas de la grapa cuando las grapas son expulsadas del cartucho de grapas. En algunas grapadoras, la operación de grapado es efectuada por barras de leva que se desplazan longitudinalmente a través del cartucho de grapas, actuando las barras de leva sobre unos empujadores de grapas para expulsar secuencialmente las grapas desde el cartucho de grapas. Una cuchilla puede desplazarse entre las hileras de grapas para cortar longitudinalmente el tejido grapado entre las hileras de grapas. Dichas grapadoras se describen en las patentes US nº 6.250.532 y nº 6.241.139, cada una de las cuales es propiedad actualmente de Tyco Healthcare Group LP.
El documento WO 2005/037329 describe un dispositivo de grapado quirúrgico que comprende un conjunto de mango que incluye una parte de mango estacionaria y un gatillo de disparo. Un interruptor selector está situado en el gatillo de disparo. Cuando el interruptor selector se desliza a lo largo del gatillo de disparo, una palanca se hace pivotar alrededor de un pasador de pivote para mover un collar en forma de U proximalmente, lo que efectúa un movimiento de un anillo exterior alrededor de una parte de cuerpo de un conjunto de cañón y mueve un anillo interior de un primer anillo de desplazamiento proximalmente desde una posición avanzada hasta una posición retraída. Cuando el anillo interior se mueve hacia su posición retraída, un trinquete de retracción es empujado hacia una posición de acoplamiento con una cremallera de retracción por un anillo tórico y un trinquete de disparo es hecho pivotar desde una posición de acoplamiento con una cremallera de disparo, contra la solicitación del anillo tórico, por un elemento de leva. Cuando el anillo exterior es movido hacia su posición avanzada por la palanca, el anillo tórico empuja el trinquete de disparo hacia una posición de acoplamiento con la cremallera de disparo y un segundo elemento de leva se acopla con una superficie de una ranura de leva para impedir un acoplamiento del trinquete de retracción con la cremallera de retracción.
En intervenciones endoscópicas o laparoscópicas, la cirugía se realiza a través de pequeñas incisiones o a través de cánulas de pequeño diámetro insertadas a través de pequeñas heridas de entrada en la piel. Debido al grado limitado de movimiento de un instrumento cuando está posicionado a través de la piel, puede ser bastante difícil para un cirujano manipular el conjunto de herramienta del instrumento alrededor del tejido corporal para acceder y/o sujetar el lugar del tejido. Se han desarrollado instrumentos con partes de cuerpo endoscópicas giratorias y conjuntos de herramienta giratorios y/o articulables para superar este problema, y éstos están comercialmente disponibles. Aunque estos instrumentos proporcionan mejoras significativas en la técnica de las herramientas endoscópicas, se desean otras mejoras que pueden reducir el tiempo requerido para intervenciones quirúrgicas y permitir un acceso más fácil a lugares de tejido.
En consecuencia, continúa existiendo una necesidad de proporcionar un dispositivo quirúrgico endoscópico o laparoscópico que tenga un conjunto de herramienta que puede manipularse rápida y fácilmente entre diferentes modos de funcionamiento.
Sumario
De acuerdo con la presente exposición, se proporciona la reivindicación 1.
En una forma de realización, el conjunto de herramienta es parte de una unidad de carga desechable ("DLU"). La DLU incluye un conjunto de herramienta posicionado en un extremo distal que tiene un conjunto de yunque y un conjunto de cartucho. El elemento alargado puede asegurarse de forma giratoria al conjunto de mango. El conjunto de herramienta es, por ejemplo, un dispositivo de grapado y el conjunto de mango incluye un trinquete de agarre que es móvil hacia una posición de acoplamiento con un árbol de accionamiento para permitir que el conjunto de herramienta sea accionado en un modo agarrador. Más específicamente, el trinquete de agarre es manipulado por un par de botones deslizantes posicionados de manera deslizante en lados opuestos del conjunto de mango y es móvil selectivamente hacia una posición de acoplamiento con el árbol de accionamiento para permitir que el árbol de accionamiento se mueva una distancia que, tras la maniobra del mango móvil, efectuará una aproximación de los conjuntos de cartucho y de yunque del conjunto de herramienta, pero no afectará al disparo de las grapas.
En otro aspecto de la exposición, un elemento de control de rotación está montado de forma giratoria en el extremo delantero del conjunto de mango para facilitar la rotación del elemento alargado con respecto al conjunto de mango.
Todavía en otro aspecto de la descripción, una palanca de articulación está montada junto al elemento de control de rotación para facilitar la articulación del conjunto de herramienta.
Breve descripción de los dibujos
En la presente memoria, se describen unas formas de realización del dispositivo de grapado quirúrgico dado a conocer haciendo referencia a los dibujos, en los que:
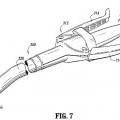
la figura 1 es una vista en perspectiva lateral del dispositivo de grapado quirúrgico actualmente descrito;
la figura 2 es una vista ampliada del área de detalle indicada mostrada en la figura 1;
la figura 3 es una vista en perspectiva lateral del extremo proximal del dispositivo de grapado quirúrgico mostrado en la figura 1, con partes separadas;
la figura 4 es una vista en perspectiva trasera y en sección transversal tomada a lo largo de la línea de sección 4-4 de la figura 1;
la figura 5 es una vista ampliada del área de detalle indicada mostrada en la figura 3;
la figura 6 es una vista en perspectiva del soporte de resorte de la figura 5;
la figura 7 es una vista en perspectiva del trinquete vertical de la figura 5;
la figura 8 es una vista en perspectiva de la leva de bloqueo de la figura 5;
la figura 9 es una vista ampliada del área de detalle indicada mostrada en la figura 3;
la figura 10 es una vista en perspectiva inferior de la cremallera dentada de la figura 3;
la figura 11 es una vista en perspectiva lateral del brazo de trinquete de agarre girado 90º con respecto a la representación mostrada en la figura 9;
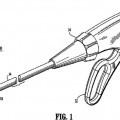
la figura 12 es una vista lateral del dispositivo de grapado quirúrgico mostrado en la figura 1;
la figura 13 es una vista ampliada del área de detalle indicada mostrada en la figura 12;
la figura 14 es una vista en sección transversal lateral del conjunto de mango de la figura 1;
la figura 15 es una vista ampliada del área de detalle indicada mostrada en la figura 14, que ilustra el conjunto de mango en modo de sujeción/disparo;
la figura 16 es una vista en sección transversal lateral tomada a lo largo de la línea en sección 16-16 de la figura 4;
la figura 17 es una vista en perspectiva lateral con partes desprendidas del conjunto de mango del dispositivo de grapado quirúrgico mostrado en la figura 1, con el alojamiento retirado;
la figura 18 ilustra el trinquete de agarre de la figura 15 engranando con la cremallera dentada;
la figura 19 es una vista en sección transversal lateral que ilustra el mango móvil pivotado hacia el mango estacionario;
Reivindicaciones:
1. Dispositivo quirúrgico que comprende:
2. Dispositivo quirúrgico según la reivindicación 1, en el que el conjunto de herramienta (27) incluye un conjunto de cartucho (26), que presenta una pluralidad de grapas soportadas en su interior, y un conjunto de yunque (28), siendo móvil por lo menos uno de entre el conjunto de yunque y el conjunto de cartucho, uno con relación al otro, entre posiciones espaciadas y aproximadas.
3. Dispositivo quirúrgico según la reivindicación 1, en el que la parte de mango incluye un elemento de control de rotación (22) configurado para facilitar la rotación del elemento alargado con respecto a la parte de mango.
4. Dispositivo quirúrgico según la reivindicación 1, en el que el mecanismo de selección de modo es un botón deslizante (40, 45) configurado para poder desplazarse entre una primera posición y una segunda posición.
5. Dispositivo quirúrgico según la reivindicación 1, en el que el conjunto de herramienta (27) está configurado para agarrar tejido en el primer modo de funcionamiento y para sujetar tejido en un segundo modo de funcionamiento.
6. Dispositivo quirúrgico según la reivindicación 1, en el que la parte de mango incluye un accionador de articulación configurado para facilitar la articulación del conjunto de herramienta.
7. Dispositivo quirúrgico según la reivindicación 1, en el que el elemento alargado puede girar alrededor del eje longitudinal en relación con la parte de mango.
8. Dispositivo quirúrgico según la reivindicación 1, en el que el conjunto de mango está configurado para retener el dispositivo quirúrgico en un modo por defecto.
9. Dispositivo quirúrgico según la reivindicación 8, en el que el primer modo de funcionamiento es un modo de funcionamiento inicial.
10. Dispositivo quirúrgico según la reivindicación 1, en el que el árbol de accionamiento tiene dientes y el mecanismo de avance del árbol de accionamiento es un trinquete de avance (35) que se acopla y desacopla con los dientes de manera alterna.
11. Dispositivo quirúrgico según la reivindicación 10, en el que el trinquete de avance (35) está fijado al mango móvil y se acopla con los dientes a medida que el mango móvil (20) se desplaza hacia el mango estacionario (18).
12. Dispositivo quirúrgico según la reivindicación 1, en el que el mecanismo de selección de modo incluye un botón deslizable montado en el mango móvil.
13. Dispositivo quirúrgico según la reivindicación 1, en el que el mecanismo de selección de modo incluye un trinquete de agarre (60) que encaja en una primera ranura definida en el árbol de accionamiento (90) cuando el mecanismo de selección de modo está en el primer modo de funcionamiento.
14. Dispositivo quirúrgico según la reivindicación 13, en el que el árbol de accionamiento (90) presenta una segunda ranura dispuesta proximalmente con respecto a la primera ranura, estando dispuesto el trinquete de agarre en la segunda ranura en el segundo modo de funcionamiento.
15. Dispositivo quirúrgico según la reivindicación 1, en el que el mecanismo de selección de modo incluye un botón deslizable y un yunque pivotable, estando dispuesto el estribo pivotable en el conjunto de mango y presentando un primer brazo para acoplarse con el mango móvil y un segundo brazo para acoplarse con el botón deslizable, manteniendo el estribo al botón deslizable en la primera posición mientras el mango móvil se mueve alejándose del mango estacionario.
Patentes similares o relacionadas:
DISPOSITIVO MOTRIZ ELECTRO-MECÁNICO PARA USAR CON INSTRUMENTOS DE ANASTOMOSIS, GRAPADO Y RESECCIÓN, del 8 de Febrero de 2012, de TYCO HEALTHCARE GROUP LP: Accesorios quirúrgicos que tienen cada uno funciones distintas y teniendo unos miembros de giro (158a, 158b, 206a, 206b) en los mismos, y un conjunto de controlador […]
DISPOSITIVOS PARA COLOCACIÓN DE DIVISIONES DENTRO DE UN ÓRGANO CORPORAL HUECO, del 14 de Noviembre de 2011, de ETHICON ENDO-SURGERY, INC.: Un dispositivo de gastroplastia, usado para colocar plicaturas dentro de al menos una cavidad, que comprende: un miembro alargado flexible, que […]
INSTRUMENTO QUIRÚRGICO QUE INCLUYE UN CONJUNTO DE BLOQUEO, del 4 de Noviembre de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico que comprende: una parte de mango que incluye un mango móvil ; una parte de cuerpo que se extiende distalmente desde la parte de […]
GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y DISPOSITIVO DE SUJECIÓN PREVIA DEL TEJIDO, del 2 de Septiembre de 2011, de TYCO HEALTHCARE GROUP LP: Un conjunto de herramienta para una grapadora quirúrgica para utilizar en un procedimiento quirúrgico endoscópico, que comprende: un yunque y un conjunto […]
 GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
ARTICULACIÓN Y MECANISMOS DE FUERZA DE ACTIVACIÓN, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico , que comprende: un mango que presenta un elemento tubular alargado que se extiende distalmente desde […]
 SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
 APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]
APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]