ARTICULACIÓN Y MECANISMOS DE FUERZA DE ACTIVACIÓN.
Instrumento quirúrgico (10), que comprende: un mango (12) que presenta un elemento tubular alargado (16) que se extiende distalmente desde el mango,
presentando el elemento tubular alargado una parte proximal (34), una parte distal (32) y una sección de articulación (30) posicionada entre las partes distal y proximal, permitiendo la sección de articulación que la parte distal se mueva con relación a la parte proximal; y un mecanismo de fuerza de accionamiento que incluye un elemento de accionamiento (70) posicionado en la parte proximal, una barra de transferencia (88) posicionada en la parte distal y un dispositivo de transferencia (84) posicionado en la sección de articulación, recibiendo el dispositivo de transferencia una fuerza de accionamiento procedente del elemento de accionamiento y reorientando la fuerza de accionamiento alrededor de la sección de articulación y hacia la barra de transferencia, estando montado el dispositivo de transferencia de forma giratoria en la sección de articulación; en el que el dispositivo de transferencia es una rueda dentada montada giratoriamente en un punto de articulación, caracterizado porque el elemento de accionamiento incluye una cremallera (80) que puede acoplarse con la rueda dentada para hacer girar la rueda dentada en respuesta a un movimiento longitudinal de la cremallera
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08253619.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: UNITED STATES SURGICAL, LEGAL 60 MIDDLETOWN AVENUE NORTH HAVEN CT 06473 ESTADOS UNIDOS DE AMERICA.
Inventor/es: VIOLA, FRANK, J..
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Noviembre de 2008.
Clasificación Internacional de Patentes:
- A61B17/072B
Clasificación PCT:
- A61B17/072 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar una hilera de grapas en una sola operación.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360643_T3.pdf
Fragmento de la descripción:
Referencia cruzada a solicitudes relacionadas
La presente solicitud reivindica los derechos y la prioridad de la solicitud de patente provisional US nº 60/985.663 presentada el 6 de noviembre de 2007, con el número de publicación US nº 2009/0114699 A1.
Antecedentes
1. Campo técnico
La presente descripción se refiere a mecanismos de fuerza de activación para su utilización en un instrumento quirúrgico. Más particularmente, la presente descripción se refiere a mecanismos de fuerza de activación capaces de transmitir una fuerza de activación o de accionamiento alrededor de un ángulo dentro de un instrumento de grapado quirúrgico.
2. Antecedentes de la técnica relacionada
En la técnica, son conocidos diversos instrumentos quirúrgicos para realizar operaciones dentro de una cavidad corporal. Algunos de estos instrumentos están configurados para pasar a través de una abertura de acceso en el cuerpo del paciente. Una parte de mango del instrumento permanece fuera del cuerpo, mientras que una parte alargada del instrumento pasa a través de la lumbrera y entra en la cavidad del cuerpo. Cuando se utilizan estos tipos de dispositivos, es difícil frecuentemente orientar el extremo distal de la parte alargada dentro del cuerpo por manipulación de la parte de mango del instrumento desde el exterior del cuerpo.
Se han desarrollado instrumentos singulares que permiten que la parte alargada del instrumento que entra en el cuerpo se doble o se mueva dentro del cuerpo con independencia de la posición de la parte de mango del instrumento fuera del cuerpo. Estos instrumentos quirúrgicos “articulados” emplean diversos mecanismos para hacer que la parte alargada se doble o se reoriente dentro del cuerpo.
El documento EP-A-1 813 203, a partir del cual se deriva el objeto de la reivindicación 1, describe un mecanismo, en el que la fuerza de accionamiento se transmite alrededor de la articulación por medio de un conjunto de engranaje cónico.
Aunque es relativamente fácil que la parte alargada del instrumento se doble o se reoriente dentro del cuerpo, la capacidad de transmitir una fuerza de activación o accionamiento alrededor del codo a un efector extremo asociado con la parte alargada plantea dificultades. Estas dificultades incluyen la pérdida de fuerza debido al combado o flexión de los elementos de accionamiento cuando estos pasan alrededor del codo en la parte alargada, etc.
Sumario
Se proporciona un instrumento quirúrgico que incluye un mango que presenta un elemento tubular alargado que se extiende distalmente desde el mango. El elemento tubular alargado presenta una parte proximal, una parte distal y una sección de articulación posicionada entre las partes distal y proximal. La sección de articulación permite que la parte distal se mueva con relación a la sección proximal. Se proporciona un mecanismo de fuerza de accionamiento en el instrumento quirúrgico, que incluye un elemento de accionamiento posicionado en la parte proximal, una barra de transferencia posicionada en la parte distal y un dispositivo de transferencia posicionado en la sección de articulación. El dispositivo de transferencia recibe una fuerza de accionamiento procedente del elemento de accionamiento y reorienta la fuerza de accionamiento alrededor de la sección de articulación y hacia la barra de transferencia. El dispositivo de transferencia está giratoriamente montado en la sección de articulación. En una realización, el elemento de accionamiento es una rueda dentada giratoriamente montada en un punto de articulación. El elemento de accionamiento incluye una cremallera que se puede acoplar con la rueda dentada para girar la rueda dentada en respuesta al movimiento longitudinal de la cremallera.
La barra de transferencia incluye una cremallera con la rueda dentada de tal manera que la rotación de la rueda dentada mueva la barra de transferencia longitudinalmente dentro de la parte distal.
Descripción de los dibujos
En la presente memoria, se describen diversas formas de realización de los presentes mecanismos de fuerza de accionamiento haciendo referencia a los dibujos 1-6. Los dibujos 7-14 ilustran formas de realización que no forman parte de la presente invención.
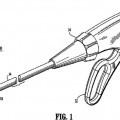
la figura 1 es una vista en perspectiva de una grapadora quirúrgica articulada que incorpora una forma de realización de un mecanismo de fuerza de accionamiento;
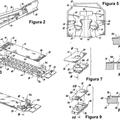
la figura 2 es una vista lateral, representada parcialmente en sección, de un conjunto de mango de la grapadora quirúrgica de las figuras 1;
la figura 3 es una vista en perspectiva ampliada, representada parcialmente en sección, de una parte extrema distal de la grapadora quirúrgica de la figura 1 en una posición no articulada;
la figura 4 es una vista en perspectiva de componentes de transferencia de fuerza del instrumento quirúrgico de la figura 1;
la figura 5 es una vista en perspectiva, parcialmente representada en sección, de la parte extrema distal de la grapadora quirúrgica de la figura 1 representada en una posición articulada, posicionada alrededor de una sección de tejido;
la figura 6 es una vista en perspectiva, similar a la figura 5, durante la activación de la grapadora quirúrgica,
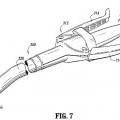
la figura 7 es una vista en perspectiva ampliada que ilustra una parte del mecanismo de fuerza de accionamiento reiniciándose para realizar una activación adicional de la grapadora quirúrgica;
la figura 8 es una vista parcial ampliada, parcialmente representada en sección, de un cartucho de grapas y un yunque de la grapadora quirúrgica durante la activación inicial;
la figura 9 es una vista lateral ampliada, similar a la figura 8, que ilustra la activación adicional de la grapadora quirúrgica para grapar la sección de tejido;
la figura 10 es una vista lateral, parcialmente representada en sección, de un conjunto de mango de una grapadora quirúrgica que incorpora una forma de realización de un mecanismo de fuerza de accionamiento;
la figura 11 es una vista en perspectiva, parcialmente representada en sección, de una parte extrema distal de la grapadora quirúrgica de la figura 10 representada en una posición no articulada;
la figura 12 es una vista en perspectiva, parcialmente representada en sección, de la parte extrema distal de la grapadora quirúrgica de la figura 10, representada en una posición articulada, posicionada alrededor del tejido;
la figura 13 es una vista en perspectiva similar a la figura 12 durante la activación; y
la figura 14 es una vista en perspectiva ampliada de una parte del mecanismo de fuerza de accionamiento reiniciándose para realizar una activación adicional.
Descripción detallada de formas de realización
Las formas de realización de los mecanismos de fuerza de accionamiento actualmente descritos para su utilización en instrumentos quirúrgico se describirán ahora con detalle haciendo referencia a los dibujos, en los que números iguales designan elementos idénticos o correspondientes en cada una de las diversas vistas. Como es común en la técnica, el término “proximal” se refiere a la parte o componente más próximo al usuario u operador, es decir, usuario, cirujano o médico, mientras que el término “distal” se refiere a la parte o componente más alejado del usuario.
La figura 1 ilustra una grapadora quirúrgica 10 que incorpora una forma de realización de un mecanismo de fuerza de accionamiento. La grapadora quirúrgica 10 incluye generalmente un mango 12 y una parte extrema distal 14 que se extiende distalmente desde el mango 12. La parte extrema distal 14 está configurada para uso endoscópico e incluye un elemento tubular alargado 16 que se extiende desde un extremo distal 18 del mango 12. Un conjunto de mordazas 20 está montado sobre un extremo distal 22 del elemento tubular alargado 16 e incluye un cartucho de grapas 24 y un yunque 26. El yunque 26 está montado para movimiento entre una posición abierta separada del cartucho de grapas y una posición cerrada sustancialmente adyacente al cartucho de grapas 24. En el mango 12, está dispuesto un disparador 28 para activar el conjunto de mordazas 20.
La grapadora quirúrgica 10 es del tipo de instrumentos quirúrgicos que son capaces de doblarse o articularse sobre una sección de articulación 30 en el elemento tubular alargado 16. La sección de articulación 30 está situada aproximadamente a mitad... [Seguir leyendo]
Reivindicaciones:
1. Instrumento quirúrgico (10), que comprende: un mango (12) que presenta un elemento tubular alargado (16) que se extiende distalmente desde el mango, presentando el elemento tubular alargado una parte proximal (34), una parte distal (32) y una sección de articulación
(30) posicionada entre las partes distal y proximal, permitiendo la sección de articulación que la parte distal se mueva con relación a la parte proximal; y un mecanismo de fuerza de accionamiento que incluye un elemento de accionamiento (70) posicionado en la parte proximal, una barra de transferencia (88) posicionada en la parte distal y un dispositivo de transferencia (84) posicionado en la sección de articulación, recibiendo el dispositivo de transferencia una fuerza de accionamiento procedente del elemento de accionamiento y reorientando la fuerza de accionamiento alrededor de la sección de articulación y hacia la barra de transferencia, estando montado el dispositivo de transferencia de forma giratoria en la sección de articulación;
en el que el dispositivo de transferencia es una rueda dentada montada giratoriamente en un punto de articulación, caracterizado porque el elemento de accionamiento incluye una cremallera (80) que puede acoplarse con la rueda dentada para hacer girar la rueda dentada en respuesta a un movimiento longitudinal de la cremallera.
2. Instrumento quirúrgico según la reivindicación 1, en el que la barra de transferencia (88) incluye una cremallera
(90) que se puede acoplar con la rueda dentada (84), de tal manera que la rotación de la rueda dentada mueva la barra de transferencia longitudinalmente en el interior de la parte distal.
Patentes similares o relacionadas:
DISPOSITIVO MOTRIZ ELECTRO-MECÁNICO PARA USAR CON INSTRUMENTOS DE ANASTOMOSIS, GRAPADO Y RESECCIÓN, del 8 de Febrero de 2012, de TYCO HEALTHCARE GROUP LP: Accesorios quirúrgicos que tienen cada uno funciones distintas y teniendo unos miembros de giro (158a, 158b, 206a, 206b) en los mismos, y un conjunto de controlador […]
DISPOSITIVOS PARA COLOCACIÓN DE DIVISIONES DENTRO DE UN ÓRGANO CORPORAL HUECO, del 14 de Noviembre de 2011, de ETHICON ENDO-SURGERY, INC.: Un dispositivo de gastroplastia, usado para colocar plicaturas dentro de al menos una cavidad, que comprende: un miembro alargado flexible, que […]
INSTRUMENTO QUIRÚRGICO QUE INCLUYE UN CONJUNTO DE BLOQUEO, del 4 de Noviembre de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico que comprende: una parte de mango que incluye un mango móvil ; una parte de cuerpo que se extiende distalmente desde la parte de […]
GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y DISPOSITIVO DE SUJECIÓN PREVIA DEL TEJIDO, del 2 de Septiembre de 2011, de TYCO HEALTHCARE GROUP LP: Un conjunto de herramienta para una grapadora quirúrgica para utilizar en un procedimiento quirúrgico endoscópico, que comprende: un yunque y un conjunto […]
 GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
 SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
 APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]
APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]
 Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]
Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]