MUÑECA PARA ROBOTS ARTICULADOS.
Muñeca para robots articulados (20), que incluye: #- un primer cuerpo hueco (22),
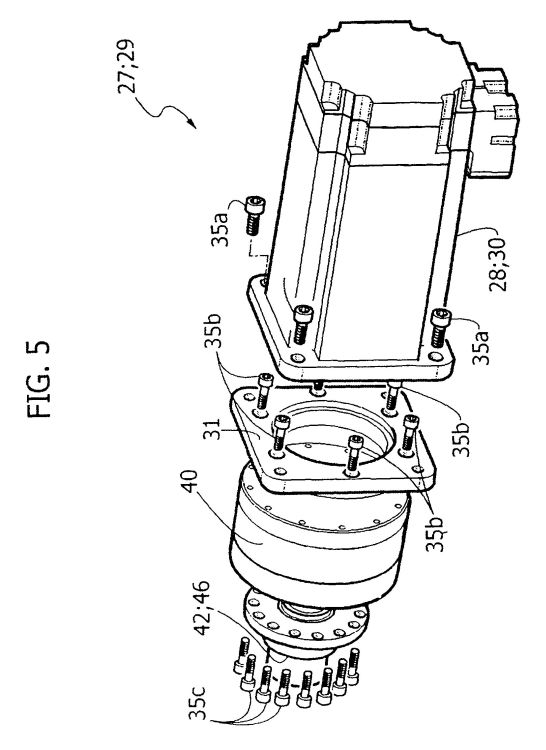
sustancialmente en forma de codo, que incluye un primer extremo y un segundo extremo y una cavidad pasante que termina en el interior de dichos extremos, estando diseñado dicho primer extremo del primer cuerpo hueco (22) para ser montado en un componente del robot que puede girar alrededor de un primer eje (IV); #- un segundo cuerpo hueco (24), sustancialmente en forma de codo, que incluye un primer extremo y un segundo extremo y una cavidad pasante que termina en el interior de dichos extremos, estando montado dicho primer extremo del segundo cuerpo hueco (24) en dicho segundo extremo de dicho primer cuerpo hueco (22) de tal modo que puede girar alrededor de un segundo eje (V) inclinado con respecto a dicho primer eje (IV); y #- un tercer cuerpo hueco (26), que incluye un primer extremo y un segundo extremo y una cavidad pasante que termina en el interior de dichos extremos, estando montado dicho primer extremo del tercer cuerpo hueco en dicho segundo extremo de dicho segundo cuerpo hueco (24) de tal manera que puede girar alrededor de un tercer eje (VI) inclinado con respecto a dicho segundo eje (V); #- en el que dichos ejes primero y tercero (IV, VI) forman unos ángulos idénticos, distintos de 90º, con respecto a dicho segundo eje (V); y #- en el que las cavidades pasantes de dichos cuerpos huecos primero, segundo y tercero (22, 24, 26) forman un paso continuo a lo largo de dichos ejes primero, segundo y tercero (IV, V, VI), a través de los cuales se ajustan cables y/o tuberías para el suministro y/o el control de un aparato asociado al tercer cuerpo hueco (26) de la muñeca del robot, #- incluyendo dicha muñeca del robot asimismo unos medios para controlar el giro de dichos cuerpos huecos segundo y tercero (24, 26) alrededor de dichos ejes segundo y tercero (V, VI), estando dicho robot articulado caracterizado porque: #- dicho ángulo formado por dichos ejes primero y tercero (IV, VI) con respecto a dicho segundo eje (V) está comprendido sustancialmente entre 50º y 70º, #- dichos medios para controlar el giro de dichos cuerpos huecos segundo y tercero (24, 26) incluye: #- un primer motor reductor (28) transportado por dicho primer cuerpo hueco (22); #- un único par de engranajes (42, 44; 42, 50) para transmitir el giro del árbol de salida de dicho primer motor reductor (28) a dicho segundo cuerpo hueco (24), estando provistos los engranajes accionados (44; 50) de dicho par de engranajes de un cuerpo anular soportado coaxialmente por el primer extremo del segundo cuerpo hueco (24); #- un segundo motor reductor (30), transportado por dicho segundo cuerpo hueco (24); y #- un único par de engranajes (46, 48) para transmitir el giro del árbol de salida de dicho segundo motor reductor (30) a dicho tercer cuerpo hueco (26), estando provisto el engranaje accionado (48) de dicho par de engranajes de un cuerpo anular soportado coaxialmente por el primer extremo del tercer cuerpo hueco (26).
Tipo: Resumen de patente/invención.
Solicitante: COMAU S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA RIVALTA 30,10095 GRUGLIASCO (TORINO).
Inventor/es: AMPARORE, MAURO, TEALDI,IGOR.
Fecha de Publicación: .
Fecha Solicitud PCT: 11 de Marzo de 2008.
Fecha Concesión Europea: 24 de Junio de 2009.
Clasificación PCT:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]