DISPOSITIVO DE TRANSFERENCIA DE OBJETOS INDUSTRIALES ENTRE DOS POSICIONES.
Dispositivo de transferencia de por lo menos un objeto de una primera posición hacia una segunda posición,
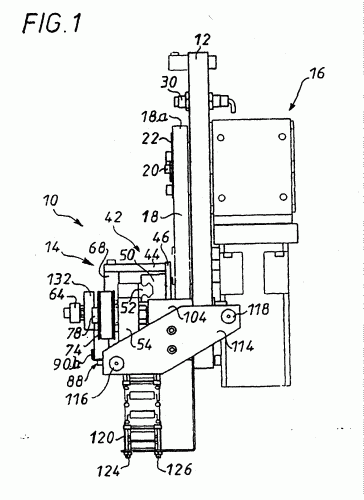
que comprende: - una estructura móvil (14), portadora de un brazo de manipulación (102) equipado con por lo menos un órgano de prensión y de posicionamiento (116, 118) de por lo menos un objeto (170); - una unidad de accionamiento (16) de la estructura móvil, que permite, por una parte, un movimiento alternativo de retracción y de extensión del brazo de manipulación, para llevar al órgano de prensión y de posicionamiento de una primera posición de extensión, en la que es apto para tomar un objeto situado en su primera posición, a una posición retraída, y luego a una posición de extensión, en la que es apto para colocar el objeto en su segunda posición y, por otra parte, un movimiento pivotante del brazo de manipulación con relación a un pivote (56), para llevar a dicho brazo de una primera dirección longitudinal, en la que el órgano de prensión y posicionamiento está frente a la primera posición del objeto, a una segunda dirección longitudinal de orientación angular diferente, en la que el órgano de prensión y de posicionamiento queda frente a la segunda posición del objeto, recubriéndose los dos movimientos, por lo menos en parte en el tiempo; - por lo menos un elemento de guía (36) de la estructura móvil en su movimiento, desplazándose el elemento de guía según una trayectoria que tiene una porción curva que corresponde a un movimiento pivotante del brazo, quedando dispuesto el pivote (56) al exterior de la curvatura.
Tipo: Resumen de patente/invención.
Solicitante: MACHINES DUBUIT.
Nacionalidad solicitante: Francia.
Dirección: 10/12, RUE DU BALLON, ZI DES RICHARDETS,93160 NOISY LE GRAND.
Inventor/es: DUMENIL, FRANCOIS, MARETTE, GILLES.
Fecha de Publicación: .
Fecha Concesión Europea: 22 de Septiembre de 2004.
Clasificación Internacional de Patentes:
- B23Q5/34 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 5/00 Mecanismos de propulsión o de avance; Disposición de los mecanismos de control a este efecto (control automático B23Q 15/00; copiado B23Q 33/00, B23Q 35/00; especialmente adaptados a las máquinas de escariar o de taladrar B23B 39/10, B23B 47/02). › Avance por transmisión mecánica de otros órganos que soportan las herramientas o las piezas, p. ej. avance de los carros portaherramientas, de las guías de herramientas.
- B25J9/10 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
- B65G47/90 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]