Dispositivo para cargar productos encuadernados.
Un aparato para cargar productos encuadernados (1), que comprende:
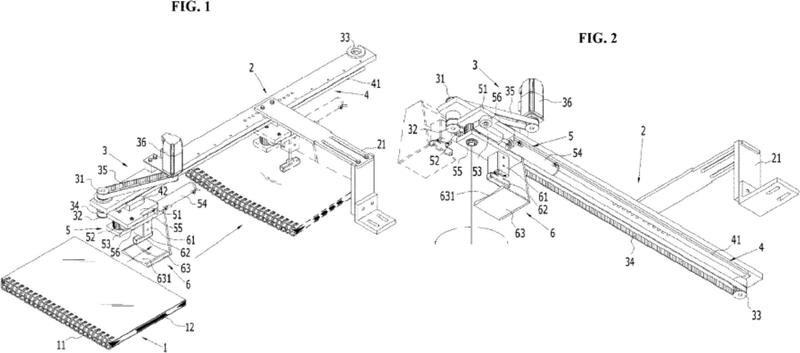
una unidad de bastidor de soporte (2) que proporciona una distancia para mover un producto encuadernado (1) encuadernado con una espiral (11) desde una ubicación de encuadernación hasta una ubicación de apilamiento;
dicho aparato para cargar productos encuadernados (1) está caracterizado por que comprende además:
una unidad de transferencia (3) que comprende
unas ruedas dentadas superior e inferior (31, 32) instaladas axialmente en una dirección vertical en una parte de la unidad de bastidor (2), una rueda dentada subordinada (33) instalada axialmente en otra parte de la unidad de bastidor (2), una correa móvil (34) que conecta la rueda dentada inferior (32) y la rueda dentada subordinada (33), una correa de transmisión (35) en la cual una parte está conectada a la rueda dentada superior (31), y un primer motor de accionamiento (36) montado en la unidad de bastidor (2) y conectado con otra parte de la correa de transmisión (35) para suministrar potencia de rotación;
una guía de movimiento lineal (4) que comprende
un carril (41) montado en una superficie inferior de la unidad de bastidor (2) en una dirección longitudinal, y un bloque (42) conectado de forma móvil al carril (41);
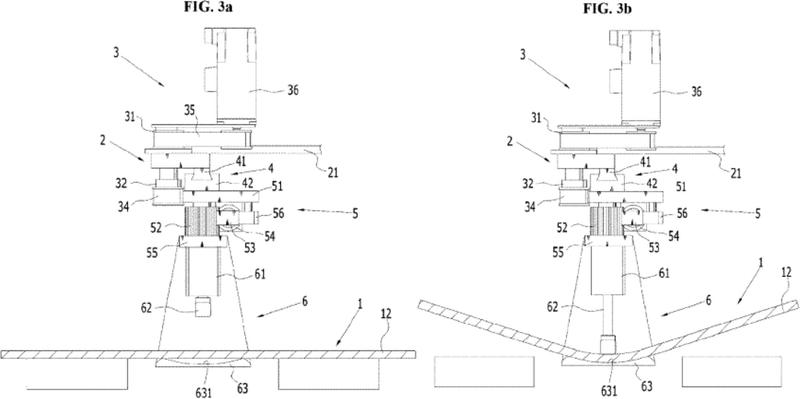
una unidad de inversión (5) que comprende
una placa de soporte (51) cuyo plano horizontal superior está fijado al bloque (42) de la guía de movimiento lineal (4) y un plano vertical lateral está fijado a la correa móvil (34),
una cremallera (53) enclavada con un piñón (52) cuya parte superior está instalada axialmente de forma giratoria en dirección vertical con respecto a la placa de soporte (51),
un primer cilindro (54) montado en la placa de soporte (51) para operar la cremallera (53), y una placa giratoria (55) fijada a una parte inferior del piñón (52) y configurada para que pueda girar con el piñón (52); y
una unidad de retención (6) que comprende
un segundo cilindro (61) montado en una superficie inferior de la placa giratoria (55) de la unidad de inversión (5) en una dirección vertical, estando acoplada una parte frontal del segundo cilindro (61) con una unidad de prensado (62) y un soporte (63) conectado a la placa giratoria (55) y configurado para retener el producto encuadernado (1) por la presión de la unidad de prensado (62) cuando al menos está colocada una parte del producto encuadernado (1),
en el que la unidad de inversión (5) invierte alternadamente una dirección de movimiento del producto encuadernado (1) movido por la unidad de retención (6) para apilar los productos encuadernados (1) de modo que unas posiciones de encuadernación de la espiral (11) de los productos encuadernados (1) se dispongan alternadamente en zigzag.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/KR2015/006894.
Solicitante: Lee, Sin-Young.
Nacionalidad solicitante: República de Corea.
Dirección: 606-1706, 68 Supsongmaeul-ro, Ilsandong-gu Goyang-si, Gyeonggi-do 410-791 REPUBLICA DE COREA.
Inventor/es: LEE,SIN-YOUNG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B25J15/02 B25J […] › B25J 15/00 Cabezas de aprehensión. › servocontroladas.
- B65G47/90 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
- B65G57/081 B65G […] › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › siendo invertidos los objetos alternativamente.
- B65H29/10 B65 […] › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 29/00 Entrega o avance de los artículos a la salida de las máquinas; Avance de los artículos hacia las pilas o cuando ya están en ellas (unión, colocación o agrupación de artículos B65H 39/00; combinaciones de operaciones de apilado y de sacado de artículos que presentan otro interés que la operación individual de apilado o de sacado de artículos B65H 83/00; recirculación de artículos B65H 85/00; para artículos que no están definidos por la nota (3) (i) de la presente subclase, ver B65G). › estando las pinzas animadas de un movimiento alternativo según una trayectoria rectilínea.
- B65H29/28 B65H 29/00 […] › a partir de pinzas mecánicas (pinzas en contacto únicamente con el borde de ataque B65H 29/02).
- B65H29/70 B65H 29/00 […] › Plegado o enderezado de artículos.
PDF original: ES-2793049_T3.pdf
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]
HERRAMIENTA ROBOTIZADA CON UNA HOJA DE CORTE Y PROCEDIMIENTO CORRESPONDIENTE PARA EL MECANIZADO DE PIEZAS DE TRABAJO, del 26 de Enero de 2012, de ABB TECHNOLOGY AB: Herramienta robotizada para el mecanizado de piezas de trabajo con un elemento de conexión para una unión con un robot, caracterizada por que una […]