PROCEDIMIENTO PARA INSTALAR UNA MÁQUINA DE TRABAJO MÓVIL.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/052038.
Solicitante: Putzmeister Engineering GmbH
Universität Stuttgart.
Nacionalidad solicitante: Alemania.
Dirección: Max-Eyth-Strasse 10 72631 Aichtal ALEMANIA.
Inventor/es: GELIES, STEPHAN, RAU, KURT, FRICK, JURGEN.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Febrero de 2008.
Clasificación Internacional de Patentes:
- B66C13/40 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Utilización de dispositivos para transmitir impulsos de control; Utilización de dispositivos de control a distancia (controles en general G05).
- B66C23/90 B66C […] › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › Dispositivos para indicar o limitar el movimiento de elevación del ángulo del aguilón o brazo.
- B66F17/00D
Clasificación PCT:
- B66C23/90 B66C 23/00 […] › Dispositivos para indicar o limitar el movimiento de elevación del ángulo del aguilón o brazo.
- B66F17/00 B66 […] › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
- E02F9/08 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Superestructuras; Soportes de superestructuras.
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2361221_T3.pdf
Fragmento de la descripción:
El invento trata de un procedimiento para instalar una máquina de trabajo móvil, en el que el suelo en un lugar de trabajo se analiza en lo referente a su constitución y/o su capacidad portante antes de que la máquina de trabajo se posicione y/o se alinee allí, y se apoye mediante patas de apoyo extensibles, sobre posiciones de instalación, que sean apropiadas de acuerdo con la constitución y capacidad portante que se determinaron del suelo. Un procedimiento de este tipo se da a conocer, por ejemplo, en la DE 103 20 382 A1.
Las máquinas de trabajo móviles, por ejemplo, autobombas de hormigón, grúas móviles y plataformas elevadoras de trabajo, están provistas de patas de apoyo extensibles que deben mejorar la estabilidad de la máquina de trabajo en el lugar de trabajo. Las patas de apoyo tienen en este caso, por un lado, la tarea de elevar los ejes del vehículo para aprovechar el peso propio de los mismos como peso estático. Por otro lado, las patas de apoyo deben impedir el vuelco de la máquina de trabajo cuando se producen elevados momentos de vuelco mediante un brazo de trabajo. Además, el suelo está sometido a un hundimiento debido a la presión sobre el suelo, producida mediante las patas de apoyo que pisan sobre el mismo. La evaluación del suelo es bastante dificultosa para un profano, de modo que una y otra vez se producen evaluaciones erróneas de la constitución del suelo. Esto tiene mayor vigencia, si en el suelo existen cavidades, por ejemplo, canales, galerías, pozos, conductos o cosas por el estilo. Una falla del suelo debajo de las patas de apoyo puede causar un vuelco de la máquina de trabajo móvil. Hasta ahora no está solucionada la detección segura de cavidades debajo de las superficies de instalación de máquinas de trabajo móviles.
Partiendo de esta premisa, el invento tiene el objetivo de mejorar un procedimiento del tipo mencionado al principio al efecto de que ya antes de la instalación de la máquina de trabajo pueda realizarse un pronóstico confiable sobre la capacidad portante del suelo.
Para conseguir ese objetivo se propone la combinación de atributos mencionada en la reivindicación 1. De las reivindicaciones dependientes resultan perfeccionamientos y configuraciones favorables del invento.
La solución según el invento parte del conocimiento de que muchos municipios ponen a disposición en forma digital en un sistema de información geográfica (GIS), datos sobre cavidades conocidas y registradas, como canales, galerías, pozos, conductos, etc., que en parte también pueden llamarse en línea, por ejemplo mediante internet. Existen máquinas de trabajo móviles que ya hoy en día utilizan una interfaz apta para internet, por ejemplo, GSM, UMTS, GPRS, mediante la cual pueden, por ejemplo, consultarse datos de los servidores municipales y transmitirse informaciones. Si la posición exacta de la máquina de trabajo móvil es conocida, pueden en consecuencia detectarse cavidades potencialmente peligrosas mediante una consulta en línea de datos GIS. Por consiguiente, la solución según el invento consiste esencialmente:
− en que mediante un ordenador se registran en una memoria de datos, geodatos de un entorno geográfico, que contiene el lugar de trabajo, con una capa de datos de suelo conocidos que definen la constitución y la capacidad portante del suelo,
− en que se determina y vincula la posición geográfica de la máquina de trabajo y su orientación en el lugar de trabajo, con los geodatos y datos de suelo registrados en forma de un juego de datos, que define al menos las posiciones geográficas de instalación de las patas de apoyo extendidas,
− y en que la máquina de trabajo se pilota con sus patas de apoyo a una posición de instalación apropiada de acuerdo con los geodatos y datos de suelo registrados.
Por el concepto “geodatos” deben entenderse a continuación esencialmente los datos cartográficos de recorrido en grados de longitud y de latitud, que indican el recorrido de la máquina de trabajo al lugar de trabajo, y las condiciones cartográficas del entorno del lugar de trabajo sobre la superficie terrestre. Los datos de suelo forman un sistema de atributos del suelo, que también se indica en el sistema de grados de longitud y latitud de la superficie terrestre, como cavidades y cosas por el estilo, que pueden ser determinantes para la capacidad portante del suelo y que están superpuestos a los geodatos como capa. Los datos de suelo pueden obtenerse, por ejemplo, de los catastros digitales de conductos de los municipios para agua, canalización, gas y electricidad mediante una red de datos en línea. Los geodatos y datos de suelo pueden estar a disposición como datos vectoriales en forma de puntos, líneas y superficies o como datos de retícula en forma de píxeles. Las estructuras de datos utilizadas corresponden actualmente en lo esencial a programas gráficos y de CAD conocidos.
Una configuración preferente del invento prevé que los geodatos y datos de suelo registrados en la memoria de datos se visualicen como representación geográfica en una pantalla electrónica y que las posiciones geográficas de instalación de las patas de apoyo se inserten en la representación gráfica de pantalla electrónica de los geodatos y datos de suelo, y que al pilotar la máquina de trabajo se las mueva con respecto a ésos. Una configuración preferente del invento prevé que la posición geográfica de la máquina de trabajo en el lugar de trabajo se determine mediante un sistema de posicionamiento por satélite, que esté dispuesto en forma fija en la máquina, como el sistema americano GPS o el sistema europeo Galileo.
Para poder determinar adicionalmente la posición geográfica exacta de instalación de las patas de apoyo se requiere además, la determinación de la orientación geográfica de la máquina de trabajo en el lugar de trabajo, o sea la orientación del eje longitudinal de vehículo de la máquina de trabajo con respecto a los puntos cardinales. La orientación geográfica de la máquina de trabajo puede, por ejemplo, determinarse mediante un segundo sistema de posicionamiento por satélite, que esté dispuesto en forma fija en la máquina y a distancia del sistema de posicionamiento por satélite. En forma alternativa a ello, la orientación geográfica de la máquina de trabajo puede determinarse mediante un sistema de sensor inercial, que esté fijo en la máquina, por ejemplo, mediante un giroscopio de fibra óptica, una brújula giroscópica o un giroscopio láser.
Con los pasos de procedimiento descritos es posible pilotar la máquina de trabajo manualmente por medio de un maquinista o automáticamente en el lugar de trabajo, a una posición de instalación que sea apropiada para sus patas de apoyo y apoyarla allí.
Por otro lado, con las medidas según el invento es posible simular el trayecto de la máquina de trabajo al lugar de trabajo y la instalación de la misma en base a un juego de datos modelo de la máquina de trabajo insertado en los geodatos y datos de suelo y guardar en una memoria de recorridos o de valores de consigna, las vías de acceso al lugar y/o las posiciones de instalación, que se determinaron, para un pilotaje ulterior de la máquina de trabajo al lugar de instalación.
A continuación, el invento se explica detalladamente en base a un ejemplo de fabricación representado en forma esquemática en el dibujo. Se muestran:
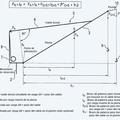
la figura 1, una vista de una autobomba de hormigón instalada en el borde de la carretera con patas de apoyo apoyadas en forma estrecha sobre el lado de la carretera.
las figuras 2a, b, una vista de arriba sobre la construcción de apoyo de la autobomba según la figura 1 en el estado del apoyo completo y del apoyo estrecho,
la figura 3, un diagrama de bloques de una disposición de conexión para la instalación de una bomba de hormigón en el lugar de trabajo.
la figura 4, una representación ampliada de la pantalla electrónica según la figura 3 con una representación cartográfica del lugar de trabajo para la bomba de hormigón con datos geográficos de suelo y posiciones optimizadas de instalación para las patas de apoyo de la máquina de trabajo.
La autobomba 1 representada en las figuras 1 y 2 se compone esencialmente de un chasis 10 de varios ejes, una pluma distribuidora de hormigón 14, que está apoyada, en forma rotatoria alrededor de un eje vertical 13 fijo al chasis, sobre un caballete de la pluma 12 cercano al eje delantero, y una construcción de apoyo 15 que presenta un bastidor... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para instalar una máquina de trabajo (1) móvil, en el que el suelo (28) en un lugar de trabajo se analiza en lo referente a su constitución y/o su capacidad portante antes de que la máquina de trabajo (1) se posicione y/o se alinee allí, y se apoye sobre posiciones de instalación (VR, VL, HR, HL), que sean apropiadas de acuerdo con la constitución y capacidad portante que se determinaron del suelo, mediante patas de apoyo extensibles (20, 24), caracterizado porque mediante un ordenador se registran en una memoria de datos (44), geodatos
(38) de un entorno geográfico, que contiene el lugar de trabajo, con una capa de datos de suelo (40) conocidos que definen la constitución y/o la capacidad portante del suelo, porque se determina y vincula la posición geográfica de la máquina de trabajo (1) y su orientación en el lugar de trabajo, con los geodatos y datos de suelo (38, 40) registrados en forma de un juego de datos, que define al menos las posiciones geográficas de instalación (VR, VL, HR, HL) de las patas de apoyo (20, 24) extendidas y porque la máquina de trabajo (1) es pilotada con sus patas de apoyo (20, 24) a sendas posiciones de instalación apropiadas de acuerdo con los geodatos y datos de suelo registrados.
2. Procedimiento, según la reivindicación 1, caracterizado porque los geodatos y datos de suelo (38, 40) registrados en la memoria de datos (44) se visualizan como representación geográfica (48) en una pantalla electrónica (50), y porque las posiciones de instalación (VR, VL, HR, HL) de las patas de apoyo (20, 24) se insertan en la representación de pantalla electrónica (48) geográfica de los geodatos y datos de suelo (38, 40), y al pilotar la máquina de trabajo (1) se las mueve con respecto a ésta.
3. Procedimiento, según las reivindicaciones 1 ó 2, caracterizado porque la posición geográfica de la máquina de trabajo (1) en el lugar de trabajo se determina mediante un sistema de posicionamiento (52) por satélite, que está dispuesto en forma fija en la máquina.
4. Procedimiento, según la reivindicación 3, caracterizado porque la orientación geográfica de la máquina de trabajo en el lugar de trabajo se determina mediante un segundo sistema de posicionamiento (54) por satélite, que está dispuesto en forma fija en la máquina y a distancia del sistema de posicionamiento (52) por satélite.
5. Procedimiento, según una de las reivindicaciones 1 hasta 3, caracterizado porque la orientación geográfica de la máquina de trabajo (1) en el lugar de trabajo se determina mediante un sistema de sensor inercial (56) fijado a la máquina.
6. Procedimiento, según la reivindicación 5, caracterizado porque el sistema de sensor inercial (56) está conformado como giroscopio de fibra óptica o como giroscopio láser.
7. Procedimiento, según una de las reivindicaciones 1 hasta 6, caracterizado porque los datos de suelo (40) contienen datos de geoinformación digitales sobre cavidades (30), canales y conductos en el suelo (28).
8. Procedimiento, según una de las reivindicaciones 1 hasta 7, caracterizado porque los datos de suelo (40) se registran en forma de ficheros de píxeles y se procesan en el ordenador (36).
9. Procedimiento, según una de las reivindicaciones 1 hasta 8, caracterizado porque los datos de suelo (40) se memorizan en forma de ficheros vectoriales y se procesan en el ordenador (36).
10. Procedimiento, según una de las reivindicaciones 1 hasta 9, caracterizado porque los geodatos y/o datos de suelo (38, 40) se llaman a través de una base de datos en línea (32).
11. Procedimiento, según una de las reivindicaciones 1 hasta 10, caracterizado porque el trayecto de la máquina de trabajo al lugar de trabajo y la instalación de la misma se simulan mediante un juego de datos modelo de la máquina de trabajo (1) insertado en los geodatos y datos de suelo (38, 40) y porque las vías de acceso y/o posiciones de instalación determinadas en este caso se almacenan en una memoria de recorridos o de valores de consigna (58) para un pilotaje ulterior de la máquina de trabajo (1) al lugar de trabajo.
12. Procedimiento, según una de las reivindicaciones 1 hasta 11, caracterizado porque la máquina de trabajo (1) es pilotada por un maquinista a una posición apropiada de instalación y allí se la apoya.
13. Procedimiento, según una de las reivindicaciones 1 hasta 11, caracterizado porque la máquina de trabajo (1) se pilota con sus patas de apoyo (20, 24), en base a sus datos de posición y orientación (46) geográficos medidos, automáticamente a las posiciones de instalación (VR, VL, HR, HL) de acuerdo con los geodatos y datos de suelo (38, 40) determinados y allí se la apoya.
14. Procedimiento, según una de las reivindicaciones 1 hasta 13, caracterizado porque la aptitud o inaptitud de una posición potencial de instalación se indica por medio de una señal óptica o acústica de liberación o de advertencia.
Patentes similares o relacionadas:
Procedimiento de aseguramiento de un movimiento de levantamiento de una carga y dispositivo de levantamiento asociado, del 29 de Abril de 2020, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de aseguramiento de un movimiento de levantamiento de una carga acoplada mecánicamente a un gancho de un dispositivo de levantamiento […]
Grúa y procedimiento para el monitoreo de la protección contra sobrecargas de una grúa de este tipo, del 8 de Enero de 2020, de Liebherr-Components Biberach GmbH: Grua con una pluma en la cual al menos un medio de recepcion de carga esta colocado de manera que puede elevarse y descender; en […]
Disposición consistente en un control y un módulo de control móvil, del 11 de Septiembre de 2019, de PALFINGER AG: Disposición consistente en un control dispuesto o por disponer en un dispositivo de elevación hidráulico y un módulo de control móvil , […]
Dispositivo de apoyo para un vehículo, del 24 de Julio de 2019, de PALFINGER AG: Dispositivo de apoyo telescópico hidráulico para un vehículo , en particular para una grúa de carga transportable con: […]
Vehículo de elevación con un sistema de control de estabilidad transversal, del 3 de Julio de 2019, de MERLO PROJECT S.R.L.: Un vehículo de elevación que comprende: - un bastidor que soporta un eje delantero y un eje trasero, que soportan, respectivamente, […]
 Grúa y procedimiento para monitorizar el limitador de sobrecarga de dicha grúa, del 26 de Junio de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa con una pluma en la que al menos un elemento de izado está montado de manera que se puede elevar y descender, en donde un dispositivo limitador […]
Grúa y procedimiento para monitorizar el limitador de sobrecarga de dicha grúa, del 26 de Junio de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa con una pluma en la que al menos un elemento de izado está montado de manera que se puede elevar y descender, en donde un dispositivo limitador […]
Procedimiento para definir una curva de carga optimizada para una grúa, método y dispositivo de control para controlar la carga suspendida en una grúa desde la curva de carga optimizada, del 12 de Junio de 2019, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de definición para definir una curva de carga para una grúa , el procedimiento de definición comprende los […]
Procedimiento para monitorizar la seguridad de grúas así como un sistema para monitorizar la seguridad de grúas, del 1 de Mayo de 2019, de LIEBHERR-WERK BIBERACH GMBH: Procedimiento para la monitorización de la seguridad de una grúa giratoria de torre con una plataforma giratoria , en donde la grúa presenta un sistema […]