CABEZAL POSICIONADOR DE HERRAMIENTA SOBRE SUPERFICIES IRREGULARES.
Cabezal posicionador de herramienta sobre superficies irregulares,
formado por un conjunto porta-herramienta que se acopla por medio de un soporte (3) a un brazo robot (4) portador, estando provisto el conjunto porta-herramienta con un sensor de fuerza (2) y detectores de distancia (7), mediante los cuales se establece un control que gobierna el accionamiento del brazo robot (4) para posicionar la herramienta de trabajo respecto de la superficie de operación
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802192.
Solicitante: ESTUDIOS DE INGENIERIA ADAPTADA, S.L.
Nacionalidad solicitante: España.
Provincia: NAVARRA.
Inventor/es: VILA PAPELL,ENRIC.
Fecha de Solicitud: 23 de Julio de 2008.
Fecha de Publicación: .
Fecha de Concesión: 20 de Junio de 2011.
Clasificación Internacional de Patentes:
- B24B19/26 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B24 TRABAJO CON MUELA; PULIDO. › B24B MAQUINAS, DISPOSITIVOS O PROCEDIMIENTOS PARA TRABAJAR CON MUELA O PARA PULIR (por electroerosión B23H; tratamiento por chorro abrasivo B24C; grabado o pulido electrolítico C25F 3/00 ); REAVIVACION O ACONDICIONAMIENTO DE SUPERFICIES ABRASIVAS; ALIMENTACION DE MAQUINAS CON MATERIALES DE RECTIFICAR, PULIR O ALISAR. › B24B 19/00 Máquinas o dispositivos concebidos especialmente para una operación particular de trabajo con muela no cubierta por otro grupo principal (trabajo con muela de roscas de tornillo B23G 1/36). › para trabajar con muela piezas con superficies en arco, p. ej. partes de carrocerías de vehículos, parachoques, cabezas de registro magnético.
- B25J9/16T2
Clasificación PCT:
- B24B19/26 B24B 19/00 […] › para trabajar con muela piezas con superficies en arco, p. ej. partes de carrocerías de vehículos, parachoques, cabezas de registro magnético.
- B25J9/16 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Descripción:
Cabezal posicionador de herramienta sobre superficies irregulares.
Sector de la técnica
La presente invención está relacionada con la automatización de trabajos sobre grandes superficies, para operaciones de limpieza, pulido o similares, proponiendo un cabezal destinado a acoplarse en un robot y que es capaz de controlar de manera continua la posición de la herramienta para adaptarla respecto de la superficie de trabajo, permitiendo operar sobre toda esa superficie en condiciones adecuadas para obtener un trabajo eficiente, sin necesidad de establecer una programación especifica de la superficie.
Estado de la técnica
En determinados sectores, como los de la aeronáutica, energía eólica, y otros semejantes, hay que realizar trabajos superficiales de limpieza, pulido, etc., sobre piezas de grandes dimensiones, las cuales presentan generalmente una superficie irregular, por lo que la programación de trabajos robotizados resulta muy complicada, recurriéndose por ello generalmente a la realización manual de dichos trabajos, con el inconveniente de costos y riesgos humanos que ello supone.
Objeto de la invención
De acuerdo con la invención se propone un cabezal portador de una herramienta para efectuar trabajos superficiales mediante un robot, con unas características que permiten adaptar automáticamente la posición de la herramienta para mantenerla de manera constante en la posición adecuada de trabajo respecto de la superficie de aplicación.
Este cabezal objeto de la invención consta de un plato porta-herramienta que va unido, mediante un sensor de fuerza, respecto de un soporte de acoplamiento a un brazo robot, incorporando dicho plato porta-herramienta centralmente una rótula mediante la que se sustenta un disco-herramienta de trabajo, permitiendo una variación de la posición de dicho disco-herramienta en inclinación para adaptarse a la superficie de trabajo.
Se obtiene así una disposición con la que el sensor de fuerza controla el esfuerzo que el disco-herramienta ejerce sobre la superficie de trabajo, generando una información que se aplica al gobierno del brazo robot portante en relación con el empuje operativo, para que la fuerza del disco-herramienta sobre la superficie de trabajo se mantenga constante.
En el plato porta-herramienta van además incorporados unos detectores de distancia, los cuales controlan la posición relativa entre dicho plato porta-herramienta y el disco-herramienta, generando a su vez una información que se aplica al gobierno del brazo robot portante, para corregir el posicionamiento, de forma que el cabezal se mantenga perpendicular respecto de la superficie de trabajo.
La herramienta puede ser también de un tipo que no establezca contacto físico con la superficie de trabajo, como un láser, una cámara termográfica, etc., controlando los detectores de distancia la posición relativa del soporte de acoplamiento al robot portador, respecto de la superficie de trabajo, para determinar un accionamiento de variación de la posición de forma que la herramienta utilizada incida constantemente de manera perpendicular sobre cada zona de la mencionada superficie de trabajo.
Por todo ello, el cabezal de la invención resulta de unas características ciertamente ventajosas para la aplicación a la que se halla destinado, adquiriendo vida propia y carácter preferente para trabajos automatizados sobre superficies irregulares.
Descripción de las figuras
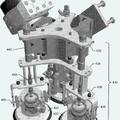
La figura 1 muestra una vista esquemática del cabezal objeto de la invención.
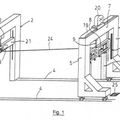
La figura 2 es una perspectiva de dicho cabezal de la invención en una aplicación práctica sobre el extremo de un brazo robot.
La figura 3 es una vista ampliada de la zona III indicada en la figura anterior.
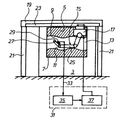
La figura 4 muestra un ejemplo de aplicación para adaptar la posición de trabajo de una herramienta sin contacto físico con la superficie de trabajo, según el concepto de la invención.
Descripción detallada de la invención
El objeto de la invención se refiere a un cabezal portador de una herramienta para realiza trabajos de forma robotizada sobre superficies irregulares, con una realización que permite adaptar la posición de la herramienta en función de la configuración de cada zona de la superficie de trabajo, para llevar a cabo los trabajos con precisión y efectividad.
El cabezal comprende un plato (1) que va unido, por medio de un sensor de fuerza (2), respecto de un soporte (3) de acoplamiento sobre un brazo robot (4) portador.
El plato (1) posee además centralmente una rótula (5), sobre la cual se une un disco-herramienta (6), el cual es susceptible de variar de posición hasta una inclinación de unos 15º, mediante la mencionada rótula (5), para adaptarse a la superficie de trabajo.
En el plato (1) van dispuestos también unos detectores de distancia (7), los cuales controlan desde distintos puntos la posición del disco-herramienta (6) con respecto al mencionado plato (1).
Con ello así, cuando el disco-herramienta (6) apoya sobre una superficie de trabajo, los sensores de fuerza (2) controlan la fuerza de dicho apoyo, generando una información que se aplica al gobierno del brazo robot (4) portador, corrigiendo el esfuerzo de empuje del mismo para que la fuerza de apoyo del disco-herramienta (6) sobre la superpie de trabajo se mantenga constante.
Y por otra parte, los detectores de distancia (7) controlan la posición del disco-herramienta (6), generando a su vez una información que se aplica también al gobierno del brazo robot (4) portante, el cual en base a dicha información corrige el posicionamiento, para que el cabezal se mantenga perpendicular con respecto a la superficie de trabajo.
El concepto del control para adaptar la posición de trabajo de una herramienta en función de la configuración de la superficie de trabajo, según el objeto de la invención, es de aplicación también para herramientas (8) que no establecen contacto físico con la superficie de trabajo, como un láser, una cámara termográfica, etc., como muestra la figura 4.
En este caso la herramienta (8) sin contacto sobre la superficie de trabajo, se dispone sobre el soporte (3) de acoplamiento al brazo robot (4) portador, con unos detectores de distancia (9) dispuestos en dicho soporte (3), para controlar desde distintos puntos la posición del mismo con respecto a la superficie de trabajo (10) correspondiente, de modo que, mediante la información que proporcionan dichos detectores de distancia (9), se corrige la posición, mediante el brazo robot (4) portador, para que la herramienta (8) incida perpendicularmente sobre la zona de operación en la mencionada superficie (10) de trabajo y a una distancia constante.
Reivindicaciones:
1. Cabezal posicionador de herramienta sobre superficies irregulares, del tipo destinado para realizar un seguimiento robotizado de una herramienta de trabajo sobre superficies irregulares, caracterizado porque consta de un conjunto porta-herramienta que posee un soporte (3) de acoplamiento a un brazo robot (4) portador, yendo provisto dicho conjunto porta-herramienta con un sensor de fuerza (2) y detectores de distancia (7), mediante los cuales se establece un control que determina el posicionamiento de la herramienta de trabajo respecto de la superficie de operación.
2. Cabezal posicionador de herramienta sobre superficies irregulares, de acuerdo con la primera reivindicación, caracterizado porque el conjunto porta-herramienta consta de un plato porta-herramienta (1) que va unido por medio del sensor de fuerza (2) respecto del soporte (3) de acoplamiento al brazo robot (4) portador, incorporando el plato porta-herramienta (1) centralmente una rótula (5) y alrededor una distribución de detectores de distancia (7), disponiéndose unido a la rótula (5) un disco-herramienta (6), el cual se adapta a la superficie de trabajo por el juego que permite la mencionada rótula (5), variando la fuerza y la posición del empuje del mismo sobre la superficie de trabajo, mediante el brazo robot (4), en función de la información que proporcionan el sensor de fuerza (2) y los detectores de distancia (7).
3. Cabezal posicionador de herramienta sobre superficies irregulares, de acuerdo con las reivindicaciones primera y segunda, caracterizado porque las informaciones que proporcionan el sensor de fuerza (2) y los detectores de distancia (7), se aplican para gobernar el brazo robot (4) portador en el seguimiento del trabajo sobre la superficie de operación.
4. Cabezal posicionador de herramienta sobre superficies irregulares, de acuerdo con la primera reivindicación, caracterizado porque sobre el soporte (3) de acoplamiento al brazo robot (4) portador es susceptible de incorporarse directamente una herramienta (8) sin contacto físico sobre la superficie de trabajo, disponiéndose en el soporte (3) unos detectores de distancia (9), mediante los cuales se determina un control con respecto a la superficie de trabajo (10) correspondiente, para situar la herramienta (8) perpendicular a la misma y a una distancia constante.
Patentes similares o relacionadas:
Dispositivo de pulido para esmerilar en bisel, del 8 de Abril de 2020, de Shinmei Tohoku Machinery Co., Ltd: Un dispositivo de pulido para pulir una pieza de trabajo, comprendiendo el dispositivo de pulido: un bastidor principal que gira alrededor de […]
Procedimiento para el mecanizado de superficies automatizado de un componente perfilado de gran tamaño, de una instalación de energía eólica, dispositivo de mecanizado y sistema de mecanizado, del 11 de Marzo de 2020, de Wobben Properties GmbH: Procedimiento para el mecanizado de superficies automatizado de un componente de perfil en forma de un componente perfilado de gran tamaño […]
Método y dispositivo para el tratamiento de acabado de superficies periféricas de secciones de piezas de trabajo rotacionalmente simétricas, del 27 de Febrero de 2019, de NAGEL MASCHINEN- UND WERKZEUGFABRIK GMBH: Método para el tratamiento de acabado de superficies periféricas de secciones de piezas de trabajo rotacionalmente simétricas en piezas de trabajo, […]
Sistema de pulimiento automatizado, del 5 de Octubre de 2016, de THE BOEING COMPANY: Un método que comprende: realizar un primer tipo de operación en una serie de características de superficie sobre una superficie de un […]
 Sistema que comprende un efector terminal robótico que incluye múltiples herramientas de abrasión y un método que utiliza el efector terminal robótico, del 28 de Diciembre de 2015, de THE BOEING COMPANY: Un método que comprende utilizar un efector terminal robótico para realizar la preparación de la superficie en una superficie de un componente […]
Sistema que comprende un efector terminal robótico que incluye múltiples herramientas de abrasión y un método que utiliza el efector terminal robótico, del 28 de Diciembre de 2015, de THE BOEING COMPANY: Un método que comprende utilizar un efector terminal robótico para realizar la preparación de la superficie en una superficie de un componente […]
 TREN DE LIJADO, PULIDO Y ABRILLANTADO DE CAMIONES, del 16 de Abril de 2008, de SARRION LARREY,JOAQUIN: Este tren comprende un puente , desplazable sobre unos raíles-guía y que es portador de unos rodillos lijadores montados sobre sendos ejes verticales […]
TREN DE LIJADO, PULIDO Y ABRILLANTADO DE CAMIONES, del 16 de Abril de 2008, de SARRION LARREY,JOAQUIN: Este tren comprende un puente , desplazable sobre unos raíles-guía y que es portador de unos rodillos lijadores montados sobre sendos ejes verticales […]
ELIMINACION DE PUNTAS DE ASPEREZA CON MATERIAL ABRASIVO DE TELA DE REJILLA., del 16 de Febrero de 2003, de WIEMANN, MARTIN: Material abrasivo de la línea de amolado, con hilos entrecruzados que forman puntos de amolado en la rejilla sobre una superficie de material abrasivo. […]
 DISPOSITIVO Y PROCEDIMIENTO PARA LA MECANIZACION FINAL DE UNA HERRAMIENTA DE TRANSFORMACION PARA UNA PIEZA DE CHAPA DE CARROCERIA, del 8 de Septiembre de 2009, de AUDI AG: Dispositivo para la mecanización final de una herramienta de transformación para una pieza de chapa de carrocería, en el que en una primera etapa de trabajo […]
DISPOSITIVO Y PROCEDIMIENTO PARA LA MECANIZACION FINAL DE UNA HERRAMIENTA DE TRANSFORMACION PARA UNA PIEZA DE CHAPA DE CARROCERIA, del 8 de Septiembre de 2009, de AUDI AG: Dispositivo para la mecanización final de una herramienta de transformación para una pieza de chapa de carrocería, en el que en una primera etapa de trabajo […]