Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(10/04/2019). Inventor/es: SCHNEIDER,KLAUS DR.-ING, KRÄUTLER,WILHELM ING. Clasificación: F15B21/00.
Sistema hidráulico con una bomba de alimentación para el suministro de fluido hidráulico del lado de succión de una bomba hidráulica , y un motor de accionamiento hidráulico para el accionamiento de la bomba de alimentación , así como con una segunda bomba hidráulica realizada como una bomba de desplazamiento variable, mediante la cual se puede accionar el motor de accionamiento hidráulico; en donde el motor de accionamiento hidráulico puede funcionar con una presión mayor y una velocidad de transporte correspondientemente menor que la bomba de alimentación ; caracterizado porque aquí la segunda bomba tiene regulación de presión.
PDF original: ES-2734514_T3.pdf
(04/04/2018) Un controlador de grúa para el control semiautomático de una grúa giratoria, comprendiendo la grúa al menos un accionador giratorio para crear un movimiento de giro de la grúa y/o un accionador de amantillado para crear un movimiento de amantillado de la grúa, comprendiendo el controlador de grúa
una unidad de entrada que puede ser operada por un operador para proporcionar una velocidad de giro deseada y/o una velocidad de amantillado deseada como una entrada del operador y
un módulo de planificación de trayectoria de referencia predictivo del modelo que comprende una unidad de optimización para calcular una trayectoria de referencia que obedece a la dinámica del sistema y sigue la entrada del operador, y
un controlador de prealimentación que utiliza la trayectoria de referencia para controlar el accionador…
Método para controlar la orientación de una carga de grúa y una grúa de pescante.
Sección de la CIP Técnicas industriales diversas y transportes
(16/08/2017). Inventor/es: SAWODNY, OLIVER, SCHNEIDER, KLAUS, ARNOLD,ECKHARD, SCHAPER,DI ULF. Clasificación: B66C13/08, B66C13/06, B66C13/46.
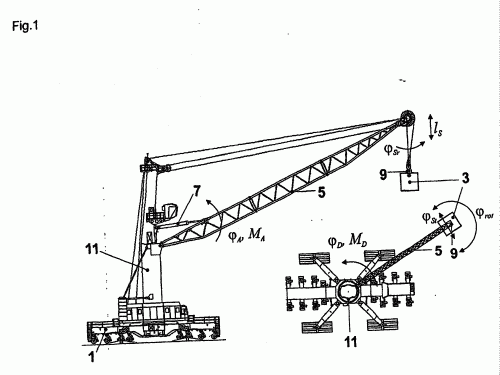
Método para controlar la orientación de una carga de grúa, en donde un manipulador para manipular la carga se conecta a una unidad de rotador a un gancho suspendido sobre cuerdas y un ángulo ηL de inclinación de la carga se controla mediante una unidad de control de la grúa,
Por medio de la cual,
la unidad de control es una unidad de control adaptativa en donde un estado del sistema estimado del sistema de grúa se determina mediante el uso de un modelo no lineal que describe las dinámicas de inclinación durante la operación caracterizada porque la no linealidad del modelo que describe las dinámicas de inclinación se refiere a la relación no lineal entre el ángulo de giro ◊ ≥ η L - φ C - φ D y el torque T reactivo resultante, por medio del cual φ C y φ D respectivamente se refieren al ángulo entre la unidad de rotador y la carga y un ángulo de rotación de la grúa.
PDF original: ES-2647590_T3.pdf
Grúa para sostener una carga suspendida en un cable de carga.
(22/03/2017) Grúa para sostener una carga suspendida en un cable de carga con un mecanismo de giro para girar la grúa, un mecanismo de basculación para la pluma y un mecanismo de elevación para hacer descender o elevar la carga suspendida en el cable de carga, con una unidad de control para el cálculo del accionamiento del mecanismo de giro, el mecanismo de basculación y/o el mecanismo de elevación, presentando la unidad de control una amortiguación de péndulo de carga y teniendo lugar el cálculo de las instrucciones de accionamiento para el accionamiento del mecanismo de giro, el mecanismo de basculación y/o el mecanismo de elevación basándose en un movimiento teórico de la carga indicado en coordenadas cartesianas, caracterizada…
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(21/12/2016). Inventor/es: NESSLER,WOLFGANG. Clasificación: F16L3/16, F16L3/22, F16L3/10, F16L55/035.
Abrazadera, en particular abrazadera plástica , para la fijación de al menos una tubería flexible y/o una tubería rígida o similares, con un eje longitudinal, con dos cuerpos de apriete idénticos que pueden unirse uno con otro mediante tornillos de montaje , donde los cuerpos de apriete presentan superficies de apoyo adyacentes, entre las cuales está formada una abertura de paso para la introducción y la fijación de al menos una tubería flexible y/o tubería rígida , caracterizada porque la abertura de paso de la abrazadera presenta una superficie interna, la cual presenta una sección transversal elíptica a lo largo del eje longitudinal, donde los tornillos de montaje presentan una cabeza del tornillo que se compone en cada caso de un cilindro que se transforma en un polígono , y los cuerpos de apriete presentan aberturas poligonales internas correspondientes.
PDF original: ES-2667503_T3.pdf
Sistema para detectar la masa de carga de una carga que se suspende en un cable de elevación de una grúa.
Sección de la CIP Técnicas industriales diversas y transportes
(30/11/2016). Inventor/es: SCHNEIDER, KLAUS, Küchler,Sebastian, AMANN,MARTIN, SCHNELLER,MATHIAS, SAWODNY,OLIVER PROF. DR. Clasificación: B66C13/16.
Sistema para detectar la masa de carga de una carga que se suspende en un cable de elevación de una grúa, el cual comprende:
una disposición de medición para medir la fuerza del cable en el cable de elevación , y
una unidad de cálculo para determinar la masa de carga en base a la fuerza del cable,
caracterizado porque,
la unidad de cálculo presenta una unidad de compensación y un observador de masa de carga que se basa en un modelo de resorte -masa del cable y de la carga , donde la unidad de cálculo describe la influencia de la determinación indirecta de la masa de carga mediante el cable de elevación en un modelo dinámico, en base a ello calcula la masa de carga y la compensa al menos de forma parcial.
PDF original: ES-2617505_T3.pdf
Procedimiento para controlar la orientación de una carga de grúa.
(21/09/2016) Procedimiento para controlar la orientación de una carga de grúa, en el que un manipulador para manipular la carga está unido mediante un dispositivo rotador con un gancho suspendido de cuerdas y el ángulo de giro φL de la carga se controla mediante un dispositivo de control con ayuda del momento de inercia JL de la carga como parámetro más importante, siendo el dispositivo de control un dispositivo de control adaptivo, determinándose el momento de inercia JL de la carga durante el funcionamiento de la grúa basándose en al menos uno de los siguientes parámetros mediante medición del estado del sistema: ángulo de giro φH del gancho, ángulo de giro φL de la carga, variación φH del ángulo de giro φH del gancho y/o la variación del ángulo de giro φL de la carga, caracterizado por que se usa un giroscopio para obtener…
Mecanismo activador de cadena y máquina de trabajo.
(17/11/2015) Mecanismo activador de cadena para una máquina de trabajo, en particular para una grúa sobre orugas o una excavadora sobre orugas, con una cadena de oruga de accionamiento, al menos una rueda de cadena montada de forma desplazable, en particular una rueda guía o intermedia , y al menos un medio tensor para tensar la cadena de oruga, en donde está previsto al menos un tope que limita el desplazamiento de la rueda de cadena montada de forma desplazable, caracterizado porque en la región de un alojamiento axial de la rueda de cadena están previstos varios orificios distribuidos en la dirección de marcha, para alojar al menos un tope desplazable, de tal manera que la fijación del tope a uno de los orificio permite un desplazamiento máximo definido.
Grúa y procedimiento para controlar una grúa.
(15/07/2015) Procedimiento para controlar y/o detectar datos de una grúa , en donde al menos una instalación de medición sobre la grúa envía uno o varios valores de medición para determinar la posición de al menos un medio de sujeción de carga, en especial el gancho de grúa , en donde se realiza un cálculo de la posición del medio de sujeción de carga sobre la base del uno o de los varios valores de medición de al menos una instalación de medición, así como de uno o varios datos característicos de la rigidez de la grúa, caracterizado porque se genera un modelo de grúa que tiene en cuenta la rigidez de la grúa y se tiene en cuenta para calcular la posición del medio de sujeción de carga.
PROCEDIMIENTO PARA INFLUIR EN EL VOLUMEN DE LLENADO DE UNA CUCHARA.
(26/05/2015) La presente invención se refiere a un procedimiento para influir en el volumen de llenado de una cuchara, en particular de una cuchara de material a granel de una grúa, comprendiendo la cuchara al menos un mecanismo de elevación y cierre y ajustándose el volumen de llenado de la cuchara durante un proceso de cierre de la cuchara mediante regulación/control de la altura de elevación de la cuchara, siendo la velocidad de elevación de la cuchara y/o la altura de elevación de la cuchara el parámetro de regulación.
Sistema de accionamiento hidráulico con recuperación de energía.
(08/04/2015) Sistema de accionamiento hidráulico para accionar un dispositivo , con una unidad de accionamiento, que puede accionar el dispositivo a través de un circuito hidráulico primario formado por una primera máquina de desplazamiento hidráulica y una segunda máquina de desplazamiento hidráulica, así como con una tercera máquina de desplazamiento hidráulica, que está o puede estar unida con el dispositivo para la transmisión de energía mecánica, y un acumulador de alta presión, que está o puede estar unido hidráulicamente con la tercera máquina de desplazamiento, de modo que a través de la tercera máquina de desplazamiento hidráulica…
Sistema de control para grúa de pluma.
(11/03/2015) Sistema de control que comprende una grúa de pluma, que tiene una torre y una pluma unida de manera pivotante a la torre , un primer actuador para crear un movimiento de elevación de la pluma , un segundo actuador para hacer rotar la torre , primeros medios para determinar la posición rA y/o la velocidad de la cabeza de la pluma mediante medición, segundos medios para determinar el ángulo de rotación jD y/o la velocidad de rotación de la torre mediante medición, controlando el sistema de control el primer actuador y el segundo actuador,
caracterizado porque
la aceleración de la carga en la dirección radial debida a una rotación de la torre se compensa mediante un movimiento de elevación de la pluma dependiente de la velocidad de rotación de la…
Control de grúa, grúa y procedimiento.
(29/01/2015) Control de grúa para la activación de los mecanismos de regulación de una grúa que tiene al menos unos ramales de cable primero y segundo para elevar la carga , con una amortiguación de oscilaciones de carga para amortiguar oscilaciones pendulares esféricas de la carga , estando previstas unas unidades de sensor primera y segunda que están asignadas a los ramales de cable primero y segundo para la determinación de los respectivos ángulos de cable y/o velocidades de ángulo de cable, caracterizado porque la amortiguación de oscilaciones de carga tiene una regulación no lineal en la que entran los ángulos de cable y/o las velocidades de ángulo de cable determinados por las unidades de sensor primera y segunda, y basándose la regulación no lineal en la inversión…
Grúa con control de grúa.
(28/01/2015) Grúa con una pluma , un control de grúa y al menos un cable para elevar una carga , estando prevista en el control de grúa al menos una unidad de sensor para determinar un ángulo de cable con respecto a la dirección de la fuerza de gravedad, en la que la al menos una unidad de sensor está dispuesta en un elemento de seguimiento de cable y se guía en el cable , caracterizada porque la al menos una unidad de sensor dispuesta en el elemento de seguimiento de cable está conectada con éste a través de una conexión cardán con la pluma de la grúa.
Sistema para la detección automática de ciclos de carga de una máquina para transferir cargas.
(08/10/2014) Sistema para la detección automática de ciclos de carga de una máquina para transferir cargas , donde la máquina comprende un dispositivo de elevación para elevar la carga y un dispositivo transportador para el desplazamiento horizontal de la carga , con:
una detección del cambio de carga para detectar automáticamente un cambio de carga al menos en base a las señales de salida de un dispositivo de medición de la fuerza de elevación,
una detección de la posición de carga que detecta la posición de la carga al menos en una dirección horizontal, y una detección del ciclo de carga para la detección automática de un ciclo de carga, donde la detección del ciclo de carga tiene lugar al menos en base a las señales de salida de la detección del cambio de carga y de la detección de la posición de…
Aparato de control de grúa.
(22/01/2014) Aparato de control de grúa para una grúa donde la carga está suspendida en un cable de grúa desde un punto desuspensión del cable de la grúa, que comprende un observador para estimar al menos la posición y/o velocidad dela carga desde al menos una entrada de detector de un primer detector al utilizar un modelo físico de la cargasuspendida en el cable de la grúa, caracterizado porque
El modelo físico del observador utiliza la posición de la carga y/o la velocidad de la carga como una variable deestado.
Método de seguridad y de control para grúas.
(01/03/2013) Procedimiento de seguridad para levantar yo transportar una carga común con una pluralidad de grúas que tienelos pasos:
- determinar posibles incidentes dañinos para vectores de movimiento de las grúas,
- activar una función de alarma si los vectores de movimiento predeterminados conducen a incidentes dañinos y/o
- restringir los vectores de movimiento usados para controlar las grúas a aquellos vectores de movimiento que noconducen en ninguna de las grúas a incidentes dañinos, caracterizado porque se determinan vectores demovimiento admitidos mediante un cálculo predictivo.
Unidad de control de grúa para el control de un mecanismo de elevación de una grúa.
(30/01/2013) Unidad de control de grúa para el control de un mecanismo de elevación de una grúa, que durante el control delmecanismo de elevación considera la dinámica de oscilaciones que se basa en la capacidad de extensión del cablede elevación, y que se reduce mediante el control apropiado del mecanismo de elevación, en donde la velocidad deaccionamiento del mecanismo de elevación se limita para la limitación de la sobreoscilación en una velocidad deaccionamiento máxima fiable, caracterizado porque la velocidad de accionamiento máxima admisible delmecanismo de elevación, se determina mediante un modelo físico que describe la dinámica de oscilaciones delsistema compuesto por el mecanismo de elevación, el cable y la carga.
Aparato de hincado y perforación con dispositivo de inversión abatible.
(24/10/2012) Aparato de hincado y perforación con una columna de martinete rebatible, un dispositivo de inversión para desviar un cable, que está articulado a la cabeza de la columna de martinete de forma que puede bascular entre al menos una posición de transporte (5b) y al menos una posición de trabajo (5a), caracterizado porque el dispositivo de inversión puede girar alrededor de un eje situado oblicuamente sobre el eje de extensión de la columna de martinete .
Procedimiento para activar un accionamiento de grúa.
(10/04/2012) Procedimiento para activar un accionamiento de una grúa, en especial de un mecanismo de giro y/o de un mecanismo de basculamiento, en donde un movimiento nominal de la punta de pluma se usa como magnitud de entrada, sobre cuya base se calcula una magnitud de control para activar el accionamiento, caracterizado porque para el cálculo de la magnitud de control se tiene en cuenta la dinámica de oscilación del sistema formado por accionamiento y estructura de la grúa, para reducir oscilaciones naturales.
PLANIFICADOR PARA EL EMPLEO DE GRÚAS.
(23/11/2011) Planificador para el empleo de grúas para planificar el empleo de una grúa, en particular de una grúa sobre orugas, con una unidad central de planificación que comprende una base de datos central con datos en relación con las grúas que se pueden emplear, y un módulo de cálculo para calcular los pares de la carga que se producen durante el empleo, en donde la simulación y el cálculo de las aplicaciones son realizados por la unidad central de planificación, y la entrada y salida de datos se realiza a través de los usuarios, en donde los usuarios se comunican con la unidad central de planificación a través de Internet.
MANIPULADOR TELESCÓPICO, EN PARTICULAR GRÚA APILADORA, CON DISPOSITIVO DE ENTRADA DE COMANDOS DE DIRECCIÓN.
(02/11/2011) Manipulador telescópico, en particular grúa apiladora, con un dispositivo de entrada de comandos de dirección, al menos un sensor para detectar el ángulo de dirección así como con una unidad de cálculo unida con el dispositivo de entrada de comandos de dirección y con el al menos un sensor, que genera una señal especificada, que puede retransmitirse a un actuador de dirección, caracterizado porque la unidad de cálculo presenta además medios con los que, en función de uno o varios parámetros operativos detectados puede limitarse el ángulo de dirección máximo permitido y pueden reducirse la velocidad de dirección y la aceleración de dirección
(24/02/2011) Dispositivo de fijación para elementos de contrapeso en una máquina, particularmente una máquina desplazable para elevar y/o transportar cargas, particularmente una grúa sobre orugas, con un elemento de retención para mantener los elementos de contrapeso en la máquina y un dispositivo tensor , mediante el cual el elemento de retención se puede tensar con un elemento de acoplamiento del lado de la máquina, caracterizado porque se proporciona una amortiguación que presenta un elemento de deformación que amortigua los impulsos que surgen del movimiento del elemento de contrapeso o de la máquina, al menos parcialmente, mediante deformación plástica del elemento de deformación
SISTEMA HIDRAULICO PARA VEHICULOS INDUSTRIALES DE PASILLO.
(10/12/2010) - Sistema hidráulico para vehículos industriales de pasillo con una instalación de filtrado para limpiar la corriente de aceite hidráulico, mediante separación por filtrado de partículas, con una instalación para extraer una corriente parcial definida del aceite hidráulico, con al menos un elemento de filtrado para filtrar la corriente parcial de aceite hidráulico y con un medidor de presión que sirve de indicación de ensuciamiento para medir la presión de remanso aplicada al filtro , caracterizado por una unidad de protocolización para registrar la presión de remanso del filtro en dependencia del tiempo y una unidad diferenciadora para establecer la velocidad de la variación de presión de remanso del filtro
(09/07/2010) Dispositivo de lastre, especialmente, dispositivo de lastre de una máquina de construcción o de trasbordo, con un elemento de lastre desmontable , caracterizado porque el elemento de lastre presenta, al menos, un elemento de posicionamiento dispuesto en su cara superior, que sobresale lateralmente por encima del elemento de lastre
PROCEDIMIENTO PARA LA MANIPULACION AUTOMATICA DE UNA CARGA DE UNA GRUA CON AMORTIGUACION DEL MOVIMIENTO PENDULAR DE LA CARGA Y DISPOSITIVO PLANIFICADOR DE LA TRAYECTORIA.
(11/05/2010) Procedimiento para la manipulación de una carga, que está colgada en un cable portador de la carga, que pertenece a una grúa o a una excavadora, con un mecanismo giratorio para hacer girar a la grúa o a la excavadora, con un mecanismo de pluma basculante para el alzamiento o bien para la inclinación de un aguilón y con un mecanismo de elevación para levantar o bien para hacer descender la carga, que está colgada del cable, con una regulación controlada por medio de ordenador para la amortiguación del movimiento pendular de la carga, que presenta un dispositivo planificador de la trayectoria, caracterizado porque comprende…
DISPOSITIVO PARA LA FABRICACION DE UN PILOTE DE DESPLAZAMIENTO TOTAL DE HORMIGON IN SITU.
(16/03/2009) Dispositivo para la fabricación de pilote de desplazamiento de hormigón in situ mediante la introducción de un tubo en tierra y el posterior relleno del tubo con hormigón con un tubo de propulsión con puntas de la broca y conectado a un tubo envolvente que se pueda volver a quitar y un motor de perforación , por lo cual se ha colocado en el tubo envolvente un vibrador que se puede conectar con el tubo envolvente según el estado de funcionamiento y se puede volver a desconectar; y el motor de perforación se puede conectar con el tubo envolvente sobre un dispositivo de sujeción cuando se le haya quitado el vibrador , y se puede desconectar cuando se le haya conectado el vibrador . Caracterizado porque de este modo, se demuestra que el dispositivo de sujeción presenta mordazas de sujeción a pares y superpuestas para…
GRUA O EXCAVADORA PARA LA TRANSFERENCIA DE UNA CARGA SUSPENDIDA DE UN CABLE DE CARGA CON GUIA DE DESPLAZAMIENTO OPTIMIZADA.
(16/03/2008) Grúa o excavadora para la transferencia de una carga suspendida de un cable de carga con un mecanismo de rotación para la rotación de la grúa o excavadora, un mecanismo de basculación para el enderezamiento y/o inclinación de un pescante y un mecanismo de elevación para la elevación y/o bajada de la carga suspendida del cable con un sistema de accionamiento, con un control de trayectoria , caracterizada porque en el control de trayectoria trayectorias de control óptimas basadas en un modelo en base a un planteamiento no lineal de modelo se calculan en línea y se actualizan mediante retroalimentación de las variables de estado y porque las variables de salida (UoutD, UoutA, UoutL,…
PROCEDIMIENTO PARA PROTEGER UNA GRUA MOVIL CONTRA UNA SOBRECARGA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/06/2007). Inventor/es: SCHMID, JOSEF KASPAR. Clasificación: B66C23/90.
Procedimiento para proteger una grúa móvil, en especial una grúa sobre orugas, contra una sobrecarga con los pasos siguientes: - archivado de datos geométricos referidos a piezas constructivas en una memoria ; - selección del estado de equipamiento deseado en un dispositivo de selección ; - composición de un modelo de simulación físico a partir de los datos seleccionados en un ordenador de control ; - introducción de datos de medición reales de sensores de fuerza y posición por el lado de la grúa; - cálculo primero de los datos geométricos, datos de centros de gravedad y fuerzas y, a continuación, de los valores de desconexión; - dado el caso, desconexión de la grúa al alcanzarse los valores de desconexión.
GRUA O EXCAVADORA PARA EL VOLTEADO DE UNA CARGA SUSPENDIDA DE UN CABLE PORTACARGA CON AMORTIGUACION DE LA OSCILACION DE LA CARGA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/2006). Ver ilustración. Inventor/es: SAWODNY, OLIVER, ASCHEMANN, HARALD, HOFER, E. P., KIMPEL, JIRG, TARIN-SAUER, CRISTINA, SCHNEIDER, KLAUS. Clasificación: B66C13/08, B66C13/06.
Grúa o excavadora para el volteado de una carga suspendida de un cable portacarga con un mecanismo giratorio para rotar la grúa o la excavadora, un mecanismo basculante para elevar y/o descender una pluma y un mecanismo de elevación para levantar y/o para bajar la carga suspendida del cable con una regulación controlada por ordenador para la amortiguación de las oscilaciones de la carga, que muestra un módulo de planificación de la trayectoria , un dispositivo de compensación de las fuerzas centrípetas y, al menos, un regulador del eje para el mecanismo giratorio , un regulador del eje para el mecanismo basculante y un regulador del eje para el mecanismo de elevación , caracterizada porque el ángulo de oscilación y la velocidad angular de oscilación de la carga (PhiSr, PhiSt, PhiSr, PhiSt) se calcula a partir de, al menos, un giroscopio.
{kind=link}