MANIPULADOR TELESCÓPICO, EN PARTICULAR GRÚA APILADORA, CON DISPOSITIVO DE ENTRADA DE COMANDOS DE DIRECCIÓN.
Manipulador telescópico, en particular grúa apiladora, con un dispositivo de entrada de comandos de dirección,
al menos un sensor para detectar el ángulo de dirección así como con una unidad de cálculo unida con el dispositivo de entrada de comandos de dirección y con el al menos un sensor, que genera una señal especificada, que puede retransmitirse a un actuador de dirección, caracterizado porque la unidad de cálculo presenta además medios con los que, en función de uno o varios parámetros operativos detectados puede limitarse el ángulo de dirección máximo permitido y pueden reducirse la velocidad de dirección y la aceleración de dirección
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05008200.
B62D6/02TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 6/00 Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00). › reaccionando únicamente a la velocidad del vehículo.
B66F9/075B […] › B66ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Características o detalles de estructura.
B66F9/24B66F 9/00 […] › Dispositivos o sistemas eléctricos.
Clasificación PCT:
B62D6/02B62D 6/00 […] › reaccionando únicamente a la velocidad del vehículo.
B66F9/075B66F 9/00 […] › Características o detalles de estructura.
B66F9/24B66F 9/00 […] › Dispositivos o sistemas eléctricos.
G05G9/047FISICA. › G05CONTROL; REGULACION. › G05G DISPOSITIVOS O SISTEMAS DE CONTROL EN LA MEDIDA EN QUE SUS CARACTERISTICAS SON UNICAMENTE MECANICAS ("mecanismos "Bowden" o similares F16C 1/10; engranajes o mecanismos no especializados con este fin F16H; mecanismos de cambio de velocidad o de inversión para transmisiones que transmiten movimientos rotativos F16H 59/00 - F16H 63/00). › G05G 9/00 Mecanismos de control maniobrados a mano equipados de un solo órgano de control que trabajan con varios órganos controlados, p. ej. selectivamente, simultáneamente. › pudiendo ser accionado a mano el órgano de control alrededor de ejes ortogonales, p. ej. palancas de mando ("joysticks").
Clasificación antigua:
B66F9/24B66F 9/00 […] › Dispositivos o sistemas eléctricos.
G05G9/047G05G 9/00 […] › pudiendo ser accionado a mano el órgano de control alrededor de ejes ortogonales, p. ej. palancas de mando ("joysticks").
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
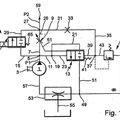
Manipulador telescópico, en particular grúa apiladora, con dispositivo de entrada de comandos de dirección La invención se refiere a un manipulador telescópico, en particular a una grúa apiladora. Las grúas apiladoras son vehículos con ruedas de caucho, equipados con un motor diésel y una cabina de conductor, similares a una autogrúa recogida. Pueden transportar y apilar contenedores. Las grúas apiladoras conocidas hasta el momento están equipadas con un separador de contenedores unido de manera firme en el brazo telescópico, es decir, el movimiento en altura del separador sólo se realiza mediante el brazo telescópico. En el caso de las grúas apiladoras conocidas, la cabina del conductor está dispuesta unida de manera firme o móvil en el chasis con el vehículo en la parte posterior, lo que permite al conductor con la construcción existente siempre una buena visibilidad sobre el separador de contenedores unido de manera firme con el brazo telescópico. En el caso de las grúas apiladoras es ventajoso realizar las ruedas traseras como ruedas dirigidas. El sistema de dirección para dirigir las ruedas se compone de un volante y una unión mecánica entre el volante y la biela de dirección asociada a las ruedas dirigidas del eje trasero. Para permitirle al conductor una dirección sencilla de la grúa apiladora pesada en parte especialmente bajo carga, ya se conocen sistemas de dirección que se ayudan de la electrónica, es decir, sistemas de dirección en los que según el ángulo de giro a través de servomotores se facilita el movimiento de dirección. No obstante, los sistemas de dirección convencionales en grúas apiladoras, guiados desde la cabina del conductor a las ruedas traseras dirigidas, tienen una construcción complicada y difícil. En el documento US 5 181 173 se describe un sistema de dirección con un control de dirección electrónico para un vehículo a motor. La relación de dirección de un vehículo de transporte de material a motor puede cambiar como reacción a la velocidad de marcha a través de un circuito de realimentación electrónico. Las vueltas del volante de un tope a otro se ajustan de manera electrónica, para modificar el ángulo de dirección según el aumento de la velocidad de marcha. El objetivo de la presente invención es proporcionar un sistema de dirección para manipuladores telescópicos, en particular grúas apiladoras, de construcción sencilla y de fácil manejo. Según la invención el objetivo se soluciona mediante las características de la reivindicación 1. Así, el manipulador telescópico, en particular la grúa apiladora, presenta un dispositivo de entrada de comandos de dirección, al menos un sensor para detectar el ángulo de dirección, así como con una unidad de cálculo unida con el dispositivo de entrada de comandos de dirección y con el al menos un sensor, que genera una señal especificada, que puede retransmitirse a un actuador de dirección. El manipulador telescópico o la grúa apiladora presenta así un denominado sistema de dirección de accionamiento asistido. En este sistema de dirección el movimiento de dirección se transmite desde un dispositivo de entrada de comandos de dirección de manera electrónica a la biela de dirección, transmitiéndose el valor nominal del ángulo de dirección especificado por cable en primer lugar a una electrónica de control. La electrónica de control proporciona entonces el comando de ajuste por cable a un actuador o actuador de dirección, que puede estar configurado como motor de ajuste hidráulico o eléctrico y genera el movimiento de dirección en la biela de dirección. La electrónica de control procesa en este caso señales desde diferentes sensores. Las dos señales más importantes son el valor nominal para el ángulo de dirección, que el conductor especifica para el dispositivo de entrada de comandos de dirección y el valor real de la posición de la biela de dirección en las ruedas traseras dirigidas, que se obtiene del movimiento de ajuste del actuador. Configuraciones adicionales preferidas se obtienen a partir de las reivindicaciones dependientes que siguen a la reivindicación principal. Así, el dispositivo de entrada de comandos de dirección puede ser ventajosamente una palanca de mando. En principio, también serían concebibles otros volantes electrónicos, tales como un disco giratorio o similar, como dispositivo de entrada de comandos de dirección. Según la invención, la unidad de cálculo presenta medios con los que, en función de uno o varios parámetros operativos detectables puede determinarse una velocidad de dirección óptima. Los parámetros operativos de este tipo pueden ser, por ejemplo, la velocidad del vehículo o la velocidad de guiñada del vehículo. En un manipulador telescópico, en particular una grúa apiladora de la presente invención, es especialmente ventajoso con respecto a un sistema de dirección habitual, mecánico, que la relación de dirección puede seleccionarse libremente, por ejemplo, en función de la velocidad del vehículo. El apoyo de la fuerza de dirección proporcionado también puede programarse libremente. Como función adicional también podría estar prevista una corrección del ángulo de dirección dinámica activa que sirva para aumentar la estabilidad de la marcha. Características, detalles y ventajas de la invención se explican con más detalle mediante un ejemplo de realización 2 ES 2 367 306 T3 representado en el dibujo. La única figura muestra esquemáticamente un eje trasero de una grúa apiladora no representada con más detalle, que presenta un sistema de dirección según la invención. Mediante un sistema de sensores, es decir, al menos un sensor, se detecta el ángulo de dirección de las ruedas traseras dirigidas de una grúa apiladora. Sin embargo, el sistema de sensores también puede registrar otras magnitudes tales como, por ejemplo, la velocidad y la velocidad de guiñada del vehículo del manipulador telescópico. Simultáneamente a través de una palanca de mando, que ventajosamente sirve como dispositivo de entrada de comandos de dirección, se especifica una especificación de dirección, es decir, un valor nominal correspondiente. Tanto el valor nominal, como el valor registrado por medio del sistema de sensores para la posición de dirección actual, así como dado el caso aún los demás parámetros se alimentan a una unidad de cálculo correspondiente, el denominado control de dirección. A partir de los parámetros detectados se determina en el control de dirección el ángulo de giro deseado, la denominada especificación de dirección, y se emite como señal correspondiente, que puede retransmitirse al actuador de dirección. El ajuste del ángulo de giro real sólo es posible dentro de un intervalo permitido. Para determinar el ángulo de giro real están previstos uno o varios sensores (realización redundante). Limitando el posible intervalo del ángulo de dirección a un intervalo permitido se adapta de manera correspondiente la velocidad de dirección y la aceleración de dirección, es decir, al reducir el intervalo permitido del ángulo de giro, por ejemplo, al aumentar la velocidad de marcha de la grúa apiladora, se reducen la velocidad de dirección y la aceleración de dirección. Así se consigue que a altas velocidades el ángulo de giro y la velocidad de dirección no se conviertan en demasiado grandes. Así, mediante una especificación máxima del ángulo de dirección por parte del conductor por el uso de un sistema de dirección, de dirección asistida, puede limitarse el ángulo de dirección real al ángulo de dirección permitido como máximo para la operación de conducción respectiva. 3 ES 2 367 306 T3
Reivindicaciones:
1. Manipulador telescópico, en particular grúa apiladora, con un dispositivo de entrada de comandos de dirección, al menos un sensor para detectar el ángulo de dirección así como con una unidad de cálculo 5 unida con el dispositivo de entrada de comandos de dirección y con el al menos un sensor, que genera una señal especificada, que puede retransmitirse a un actuador de dirección, caracterizado porque la unidad de cálculo presenta además medios con los que, en función de uno o varios parámetros operativos detectados puede limitarse el ángulo de dirección máximo permitido y pueden reducirse la velocidad de dirección y la aceleración de dirección. 2. Manipulador telescópico según la reivindicación 1, caracterizado porque como dispositivo de entrada de comandos de dirección sirve una palanca de mando. 4 ES 2 367 306 T3
Patentes similares o relacionadas:
Dispositivo de desconexión de acelerador y/o motor para vehículos en conducción no autorizada, del 19 de Marzo de 2019, de ANUARBE GARCÍA, Juan Luis: 1. Dispositivo de desconexión de acelerador y/o motor para vehículos en conducción no autorizada, caracterizado por poseer un sistema modular que es conectado […]
Dispositivo de dirección para un automóvil, del 30 de Noviembre de 2016, de LEOPOLD KOSTAL GMBH & CO. KG: Dispositivo de dirección para un automóvil,
con un asidero primario , que está acoplado a través de una conexión mecánica a un mecanismo de dirección para influir […]
DISPOSITIVO DE SERVODIRECCION PARA VEHICULO., del 16 de Noviembre de 2006, de AUDI AG: Dispositivo de servodirección para un vehículo, en particular para un vehículo automóvil con ruedas, con una bomba , un dispositivo de estrangulamiento regulable […]
SISTEMA DE DIRECCION PARA VEHICULOS AUTOMOVILES CON UNA SERVODIRECCION HIDRAULICA., del 1 de Agosto de 2006, de ZF LENKSYSTEME GMBH: Sistema de dirección para vehículos automóviles con una servodirección hidráulica que está diseñada para un comportamiento de dirección nominal y presenta una válvula […]
SISTEMA DE DIRECCION ASISTIDA., del 16 de Abril de 2006, de KAYABA INDUSTRY CO., LTD.: Un sistema de dirección de potencia, incluyendo: una válvula de dirección para controlar un cilindro de potencia ; un orificio variable (a) dispuesto hacia arriba […]
SISTEMA DE DIRECCION ASISTIDA PARA VEHICULO A MOTOR., del 16 de Julio de 2004, de MANDO CORPORATION: Un sistema de dirección asistida para vehículo a motor, que tiene un árbol de entrada que está dispuesto centralmente en un alojamiento (1, […]
DIRECCION ASISTIDA., del 1 de Mayo de 2004, de KAYABA INDUSTRY CO., LTD.: Una dirección asistida, que tiene una bobina montada en un cuerpo principal (B) y que tiene uno de los extremos dirigido a una de las […]
BOMBA DE DIRECCION ASISTIDA, del 1 de Diciembre de 2007, de IXETIC BAD HOMBURG GMBH: Bomba, especialmente una bomba de dirección asistida, con una válvula de regulación de caudal , donde dicha válvula de regulación de caudal contiene, […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 BOMBA DE DIRECCION ASISTIDA, del 1 de Diciembre de 2007, de IXETIC BAD HOMBURG GMBH: Bomba, especialmente una bomba de dirección asistida, con una válvula de regulación de caudal , donde dicha válvula de regulación de caudal contiene, […]
BOMBA DE DIRECCION ASISTIDA, del 1 de Diciembre de 2007, de IXETIC BAD HOMBURG GMBH: Bomba, especialmente una bomba de dirección asistida, con una válvula de regulación de caudal , donde dicha válvula de regulación de caudal contiene, […]