Sistema de control para grúa de pluma.
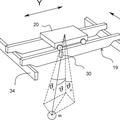
Sistema de control que comprende una grúa de pluma, que tiene una torre (2) y una pluma (5) unida de manera pivotante a la torre (2),
un primer actuador (7) para crear un movimiento de elevación de la pluma (5), un segundo actuador para hacer rotar la torre (2), primeros medios para determinar la posición rA y/o la velocidad de la cabeza de la pluma (5) mediante medición, segundos medios para determinar el ángulo de rotación jD y/o la velocidad de rotación de la torre (2) mediante medición, controlando el sistema de control el primer actuador (7) y el segundo actuador,
caracterizado porque
la aceleración de la carga (3) en la dirección radial debida a una rotación de la torre (2) se compensa mediante un movimiento de elevación de la pluma (5) dependiente de la velocidad de rotación de la torre (2) determinado por los segundos medios.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07019661.
Solicitante: LIEBHERR-WERK NENZING GMBH.
Nacionalidad solicitante: Austria.
Dirección: DR.-HANS-LIEBHERR-STRASSE 1 6710 NENZING AUSTRIA.
Inventor/es: SAWODNY, OLIVER, SCHNEIDER, KLAUS, NEUPERT,JORG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para limitar o impedir el balanceo longitudinal o transversal de las cargas.
PDF original: ES-2534213_T3.pdf
Fragmento de la descripción:
Sistema de control para grúa de pluma
La presente invención se refiere a un sistema de control para una grúa de pluma, en el que la grúa de pluma tiene una torre y una pluma unida de manera pivotante a la torre, un primer actuador para crear un movimiento de elevación de la pluma, y un segundo actuador para hacer rotar la torre. La grúa tiene además primeros medios para determinar la posición ía y/o la velocidad rA de la cabeza de la pluma mediante medición y segundos medios para determinar el ángulo de rotación cpo y/o la velocidad de rotación ipD de la torre mediante medición. El sistema de control para la grúa de pluma controla el primer actuador y el segundo actuador de la grúa.
Se conoce un sistema de este tipo, por ejemplo, a partir del documento DE 100 64 182 A1. En el mismo, se presenta una estrategia de control para controlar el movimiento de elevación de la pluma, que intenta evitar el balanceo de la carga basándose en un modelo físico de la carga suspendida en el cable de la grúa y la propia grúa. Sin embargo, el modelo usado es sólo lineal y, por tanto, no tiene en cuenta los efectos no lineales importantes observados en grúas de pluma. Dado que la aceleración centrífuga de la carga debida a la rotación de la torre también puede conducir al balanceo de la carga, una unidad de control previo intenta compensarlo usando datos para la rotación de la grúa basándose en el movimiento tangencial deseado de la carga dado por un generador de trayectoria de referencia como entrada. Sin embargo, estos datos basados en las trayectorias de referencia usados en la unidad de control previo pueden diferir considerablemente de los movimientos reales de la grúa y, por tanto, conducir a un control impreciso de los movimientos de la carga y especialmente a un escaso control antibalanceo.
El documento US 2004/0164041 A1 da a conocer una grúa con una regulación controlada por ordenador para la amortiguación de los balanceos de carga, que contiene un módulo de planificación de recorrido, una unidad de compensación de fuerza centrípeta y al menos un regulador de árbol para el mecanismo de rotación, un regulador de árbol para el mecanismo de elevación y un regulador de árbol para el mecanismo de levantamiento. Dicha compensación de fuerza centrípeta compensa las fuerzas centrípetas que desvían la carga en una dirección radial usando una velocidad de rotación deseada de la carga que se genera en el módulo de planificación de recorrido de la regulación controlada por ordenador.
A partir del documento DE 103 24 692 A1, se conoce una unidad de planificación de trayectoria que también intenta evitar el balanceo de la carga suspendida en un cable. Sin embargo, se producen los mismos problemas que anteriormente, ya que todo el planificador de trayectoria se basa en datos modelados y, por tanto, actúa de nuevo como un sistema de control previo.
Por tanto, el objeto de la presente invención es proporcionar un sistema de control para una grúa de pluma que tenga una mayor precisión y especialmente que conduzca a un mejor control antibalanceo.
Este objeto se satisface mediante un sistema de control para una grúa de pluma según la reivindicación 1. En un sistema de control de este tipo que controla el primer actuador y el segundo actuador de la grúa de pluma, la aceleración de la carga en la dirección radial debida a una rotación de la torre se compensa mediante un movimiento de elevación de la pluma dependiente de la velocidad de rotación tpD, de la torre determinada por los segundos medios. Los segundos medios determinan esta velocidad de rotación tpD de la torre o bien midiendo directamente la velocidad o bien midiendo la posición de la torre en relación con el tiempo y calculando luego la velocidad a partir de estos datos. En la presente invención, el control del movimiento de elevación de la pluma que compensa la aceleración de la carga en la dirección radial debida a la rotación de la torre se basa, por tanto, en datos medidos, que representan los movimientos reales de la grúa. De ese modo, se evitan los problemas presentes en sistemas de control previo, ya que el control antibalanceo que también tiene en cuenta los movimientos de rotación de la torre está integrado en el sistema de control y se basa en datos obtenidos mediante mediciones. De ese modo, la presente invención conduce a un control antibalanceo de alta precisión.
Preferiblemente, el sistema de control de la presente invención tiene una primera unidad de control para controlar el primer actuador y una segunda unidad de control para controlar el segundo actuador. Una arquitectura de control descentralizada de este tipo conduce a un sistema de control sencillo aunque eficaz.
Preferiblemente, la primera unidad de control evita el balanceo de la carga en la dirección radial debido a los movimientos de elevación de la pluma y la rotación de la torre. De ese modo, la primera unidad de control que controla los movimientos de elevación de la pluma tiene en cuenta tanto el balanceo creado por los propios movimientos de elevación de la pluma como el balanceo debido a la rotación de la torre. Esto conduce al control antibalanceo particularmente eficaz de la presente invención.
Preferiblemente, la segunda unidad de control evita el balanceo de la carga en la dirección tangencial debido a la rotación de la torre. De ese modo, la segunda unidad de control evita automáticamente el balanceo en la dirección tangencial y hace más fácil la manipulación de la carga para el conductor de la grúa. Sin embargo, el segundo
actuador también podría estar controlado directamente por el conductor de la grúa sin un control antibalanceo adicional.
Preferiblemente, en la presente invención, la primera y/o la segunda unidad de control se basan en la inversión de sistemas no lineales que describen los respectivos movimientos de grúa en relación con el balanceo de la carga. Dado que muchas contribuciones importantes al balanceo de la carga dependen de efectos no lineales de la grúa, los actuadores y la carga suspendida en el cable, los sistemas no lineales de la presente invención conducen a una precisión mucho mayor que los sistemas lineales. Estos sistemas no lineales tienen el estado de la grúa como entrada, y la posición y los movimientos de la carga como salida. Invirtiendo estos sistemas, la posición y los movimientos de la carga pueden usarse como entrada para controlar los actuadores que mueven la grúa.
Preferiblemente, en la presente invención, la grúa tiene adicionalmente terceros medios para determinar la velocidad ^ry/o el ángulo de cable radial cpSry/o la velocidad ^Jty/o el ángulo de cable tangencial cpsf mediante medición. Las velocidades y los ángulos de cable describen el balanceo de la carga suspendida en el cable, de manera que determinar estos datos mediante medición y usarlos como entrada para el sistema de control de la presente invención conducirá a una mayor precisión.
Preferiblemente, en la presente invención, el control del primer actuador mediante la primera unidad de control se basa en la velocidad de rotación de la torre determinada por los segundos medios. De ese modo, la primera unidad de control para controlar el movimiento de elevación de la pluma también tendrá en cuenta la aceleración de la carga en la dirección radial debida a la velocidad de rotación de la torre. Adlclonalmente, un control de este tipo también se basará preferiblemente en la velocidad ^Jty/o el ángulo de cable radial <psr obtenidos por los terceros medios. Preferiblemente, también se basará en la posición rA y/o la velocidad rj de la cabeza de la pluma obtenidas por los primeros medios.
Preferiblemente, en la presente invención, se calculan derivadas de orden superior de la posición de carga radial ffy y preferiblemente ri_a, a partir de la velocidad y y el ángulo de cable radial <psr determinados por los terceros medios y la velocidad rA y la posición de la cabeza de la pluma determinadas por los primeros medios. Estas derivadas de orden superior de la posición de carga radial son muy difíciles de determinar mediante medición directa, ya que el ruido en los datos conducirá a resultados cada vez peores. Sin embargo, estos datos son importantes para el control de la posición de carga, de manera que la presente Invención, en la que estas derivadas de orden superior se calculan a partir de mediciones de posición y velocidad mediante una relación algebraica directa, conduce a resultados mucho mejores. Los expertos en la técnica reconocerán fácilmente que esta característica de la presente invención es altamente ventajosa independientemente de las otras características de la presente invención.
Preferiblemente, en la presente invención, se calculan... [Seguir leyendo]
Reivindicaciones:
1. Sistema de control que comprende una grúa de pluma, que tiene una torre (2) y una pluma (5) unida de manera pivotante a la torre (2), un primer actuador (7) para crear un movimiento de elevación de la pluma (5), un segundo actuador para hacer rotar la torre (2), primeros medios para determinar la posición rA y/o la velocidad de la cabeza de la pluma (5) mediante medición, segundos medios para determinar el ángulo de rotación cpD y/o la velocidad de rotación (jjn de la torre (2) mediante medición, controlando el sistema de control el primer actuador (7) y el segundo actuador,
caracterizado porque
la aceleración de la carga (3) en la dirección radial debida a una rotación de la torre (2) se compensa mediante un movimiento de elevación de la pluma (5) dependiente de la velocidad de rotación de la torre (2) determinado por los segundos medios.
2. Sistema de control según la reivindicación 1, que tiene una primera unidad de control para controlar el primer actuador (7) y una segunda unidad de control para controlar el segundo actuador.
3. Sistema de control según la reivindicación 2, en el que la primera unidad de control evita el balanceo de la carga (3) en la dirección radial debido a los movimientos de elevación de la pluma (5) y la rotación de la torre (2).
4. Sistema de control según la reivindicación 2, en el que la segunda unidad de control evita el balanceo de la carga (3) en la dirección tangencial debido a la rotación de la torre (2).
5. Sistema de control según la reivindicación 2, en el que la primera y/o la segunda unidad de control se basan en la inversión de sistemas no lineales que describen los respectivos movimientos de grúa en relación con el balanceo de la carga (3).
6. Sistema de control según la reivindicación 1, en el que la grúa tiene adicionalmente terceros medios para determinar la velocidad pSr y/o el ángulo de cable radial q>sr y/o la velocidad $st y/o el ángulo de cable tangencial <pst mediante medición.
7. Sistema de control según la reivindicación 6, en el que el control del primer actuador (7) mediante la primera unidad de control se basa en la velocidad de rotación tpD de la torre (2) determinada por los segundos medios.
8. Sistema de control según la reivindicación 1, en el que derivadas de orden superior de la posición de carga (3) radial rLa y preferiblemente ri_a se calculan a partir de la velocidad y5ry el ángulo de cable radial <psr determinados por los terceros medios y la posición rA y velocidad de la cabeza de la pluma (5) determinadas por los primeros
medios.
9. Sistema de control según la reivindicación 1, en el que derivadas de orden superior del ángulo de carga (3) de rotación $ld y preferiblemente ^ld se calculan a partir de la velocidad yst y el ángulo de cable tangencial cpst determinados por los terceros medios y el ángulo de rotación <pd y la velocidad de rotación de la torre (2) determinados por los segundos medios.
10. Sistema de control según la reivindicación 1, en el que los segundos medios determinan adicionalmente la segunda y/o tercera derivada del ángulo de rotación de la torre (2) tpo y/o ifio.
11. Sistema de control según la reivindicación 10, en el que se usa la segunda y/o tercera derivada del ángulo de rotación de la torre (2) y/o ¡pd para la compensación del balanceo de la carga (3) en la dirección radial debido a una rotación de la torre (2).
12. Sistema de control especialmente según la reivindicación 1, en el que el sistema de control se basa en la inversión de un modelo que describe los movimientos de la carga (3) suspendida en un cable dependiente de los movimientos de la grúa.
13. Sistema de control especialmente según la reivindicación 12, en el que el modelo es no lineal.
14. Sistema de control según la reivindicación 12, en el que el sistema de control usa el modelo Invertido para controlar los actuadores primero y segundo con el fin de mantener la carga (3) en una trayectoria predeterminada.
15. Sistema de control según la reivindicación 14, en el que las trayectorias predeterminadas de la carga (3) se
proporcionan mediante un generador de trayectoria.
16. Sistema de control según la reivindicación 12, en el que el modelo tiene en cuenta las no linealidades debidas a la cinemática del primer actuador (7) y/o la dinámica del primer actuador (7).
17. Sistema de control según la reivindicación 12, en el que el modelo es un modelo no lineal de la carga (3) suspendida en el cable y la grúa que incluye el primer actuador (7).
18. Sistema de control según la reivindicación 13, en el que el modelo no lineal se linealiza o bien mediante linealización exacta o bien mediante linealización de entrada/salida.
19. Sistema de control según la reivindicación 18, en el que el modelo no lineal se simplifica para hacer posible la linealización.
20. Sistema de control según la reivindicación 19, en el que la dinámica interna del modelo debida a la simplificación es estable y/o medible.
21. Sistema de control según la reivindicación 12, en el que el control se estabiliza usando un bucle de control de realimentación.
22. Sistema de control según la reivindicación 12, en el que el balanceo de la carga (3) se compensa mediante movimientos contrarios del primer y/o el segundo actuador.
23. Sistema de control según la reivindicación 22, en el que los movimientos contrarios se producen al comienzo y al final de un movimiento principal.
24. Sistema de control según la reivindicación 13, en el que el modelo no lineal describe el movimiento radial de la carga (3).
25. Sistema de control según la reivindicación 12, en el que se tiene en cuenta la aceleración centrifuga de la carga (3) debida a la rotación de la grúa.
26. Sistema de control según la reivindicación 25, en el que la aceleración centrífuga se trata como una perturbación.
27. Grúa de pluma, que tiene
una torre (2) y una pluma (5) unida de manera pivotante a la torre (2), un primer actuador (7) para crear un movimiento de elevación de la pluma (5), un segundo actuador para hacer rotar la torre (2),
primeros medios para determinar la posición rAy/o velocidad i^de la cabeza de la pluma (5) mediante medición,
segundos medios para determinar el ángulo de rotación <pd y/o la velocidad de rotación ipd de la torre (2) mediante medición y
un sistema de control según cualquiera de las reivindicaciones anteriores.
Patentes similares o relacionadas:
Dispositivo elevador para subir y bajar objetos pesados, del 3 de Junio de 2020, de Mohr Lizenz Verwaltungs GmbH: Dispositivo elevador para subir y bajar objetos, en particular objetos pesados, que comprende dos disposiciones de marco situados […]
Carretillas pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, del 1 de Enero de 2020, de Pfenning Elektroanlagen GmbH: Carretilla pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, con un bastidor , un dispositivo de elevación , que cuelga […]
 Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación, del 25 de Septiembre de 2019, de VINATI S.R.L: Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente […]
Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación, del 25 de Septiembre de 2019, de VINATI S.R.L: Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente […]
SISTEMAS Y MÉTODOS DE ESTABILIDAD DE CARGA SUSPENDIDA, del 15 de Agosto de 2019, de VITA INCLINATA TECHNOLOGIES, INC: 1. Un aparato de sistema de estabilidad de carga para estabilizar una carga suspendida a través de un cable desde arriba , comprendiendo […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Procedimiento de control de grúa antibalanceo con filtro de tercer orden, del 29 de Mayo de 2019, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de desplazamiento de carga suspendida en un punto de unión de unión (H) de un equipo de elevación , comprendiendo dicho […]
Carretillas pórtico con tambor de cable individual, del 20 de Febrero de 2019, de Pfenning Elektroanlagen GmbH: Carretilla pórtico, con un bastidor , un equipo de manejo de la carga , que cuelga entre el bastidor y que se puede cerrar con una carga, preferentemente […]
Aparato y método para posicionar y orientar una carga, del 30 de Enero de 2019, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un aparato para posicionar y orientar una carga, comprendiendo el aparato: - una estructura de soporte (101a, 101b, 101c) movible en una primera dirección, la estructura […]