PROCEDIMIENTO PARA INFLUIR EN EL VOLUMEN DE LLENADO DE UNA CUCHARA.
La presente invención se refiere a un procedimiento para influir en el volumen de llenado de una cuchara,
en particular de una cuchara de material a granel de una grúa, comprendiendo la cuchara al menos un mecanismo de elevación y cierre y ajustándose el volumen de llenado de la cuchara durante un proceso de cierre de la cuchara mediante regulación/control de la altura de elevación de la cuchara, siendo la velocidad de elevación de la cuchara y/o la altura de elevación de la cuchara el parámetro de regulación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201431729.
Solicitante: LIEBHERR-WERK NENZING GMBH.
Nacionalidad solicitante: Austria.
Dirección: Dr.-Hans Liebherr-Str.1 6710 Nenzing AUSTRIA.
Inventor/es: SCHWARZHANS,Andreas.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C3/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 3/00 Elementos o dispositivos de toma de carga fijados a los mecanismos de subida o bajada de las grúas o adaptados para ser utilizados con ellos y destinados principalmente a transmitir fuerzas para el levantamiento de material a granel; Cucharas cogedoras (tolvas u otros receptáculos B65D, p. ej. pallets B65D 19/00; dragas equipadas con cucharas E02F). › por motores hidráulicos.
- B66C3/18 B66C 3/00 […] › por motores eléctricos.
Fragmento de la descripción:
La presente invención se refiere a un procedimiento para influir en el volumen de llenado de una cuchara.
Por el estado de la técnica se conocen procedimientos para influir en los volúmenes de llenado de cucharas de grúa. En los procedimientos conocidos, una electrónica de regulación/control interviene en el desarrollo del movimiento de una grúa para optimizar el desarrollo del movimiento respecto a determinados parámetros. Por ejemplo, debe conseguirse mediante la intervención en el desarrollo del movimiento un aumento de la carga y descarga y por lo tanto una utilización óptima de la grúa durante su servicio.
También se conocen por el estado de la técnica procedimientos que deben conseguir mediante intervenciones correspondientes en los desarrollos del movimiento de la grúa un tratamiento cuidadoso de la grúa evitando sobrecargas de la grúa. Aquí, la técnica de regulación/control, en particular, trata cuidadosamente la estática de la grúa, detectando en primer lugar cuando se cogen cargas excesivas e impidiéndolo a continuación. Los procedimientos de este tipo también se usan como sistemas de asistencia al conductor, debiendo conseguirse de acuerdo con los procedimientos por ejemplo una simplificación del manejo de la grúa.
El problema es que hay muchos factores de influencia que determinan el grado de llenado de la cuchara. Por ejemplo, influye el ángulo de entrada de la cuchara en el material a cargar, la densidad del material, que puede variar más del 20 % en una carga, por ejemplo de un barco a descargar, la geometría de la cuchara o el tiro oblicuo que actúa sobre la cuchara. Puesto que una sobrecarga de la cuchara puede conducir a daños en la grúa, los operadores o conductores de las grúas prefieren llenar la cuchara en parte claramente menos de lo que en realidad sería admisible o posible.
El objetivo de la presente invención es, por lo tanto, poner a disposición un procedimiento para influir en el volumen de llenado de una cuchara, mediante el cual se consiga un mejor llenado de la cuchara.
Este objetivo se consigue de acuerdo con la invención mediante un procedimiento para influir en el volumen de llenado de una cuchara, en particular de una cuchara para productos a granel de una grúa con las características de la reivindicación 1, comprendiendo la
cuchara al menos un mecanismo de elevación y cierre ajustándose el volumen de llenado de la cuchara durante un proceso de cierre de la cuchara mediante regulación/control de la altura de elevación de la cuchara, siendo el parámetro de regulación la velocidad de elevación de la cuchara y/o la altura de elevación de la cuchara.
De forma ventajosa, así es posible que el operador o conductor especifique la velocidad de cierre de la cuchara optimizando el sistema la altura de elevación necesaria de la cuchara durante el proceso de cierre de tal modo que se consiga el grado de llenado deseado, basándose para ello en el modelo.
El proceso de llenado de la cuchara se automatiza de este modo en parte, lo que facilita al operador alcanzar estados de llenado optimizados de la cuchara, sin quitar al operador el control final del proceso de llenado. Al mismo tiempo se reduce y, en el caso óptimo se evita, una posible sobrecarga de la estructura de la grúa. También se minimiza una influencia dado el caso negativa del conductor en el volumen de llenado. Por lo tanto, también conductores menos experimentados pueden aumentar claramente la carga y descarga o al mismo tiempo puede bajarse en general claramente el esfuerzo de trabajo de los conductores.
Para realizar el procedimiento de acuerdo con la invención, un dispositivo de regulación/control se acopla a la grúa o puede estar previsto a modo estándar en la grúa, que está concebido para detectar entradas de sensores o valores de sensores, procesarlos y emitir señales de regulación/control a la grúa o sus grupos.
En un ejemplo de realización preferible es concebible que en función de los valores de sensores medidos se determine un cambio en el tiempo necesario de la altura de elevación de la cuchara para alcanzar una carga objetivo que va a elevarse por la grúa de forma continua con ayuda de un modelo.
El modelo puede reaccionar de forma ventajosa dinámicamente a parámetros que varían en el transcurso de un trabajo de una grúa, como p.ej. una densidad de material variable del material a cargar o a otros parámetros que varían optimizándose respecto a la grúa o a los requisitos que se presenten. Por lo tanto, se dispone de un sistema con autoaprendizaje, que puede adaptarse dinámicamente a distintas circunstancias.
En otro ejemplo de realización es concebible que de forma adicional o alternativa se determine en función de la velocidad de cierre de la cuchara un cambio en el tiempo necesario de la altura de elevación de la cuchara para alcanzar la carga objetivo que va a
elevarse por la grúa de forma continua con ayuda de un modelo.
El procedimiento puede usar así como parámetros de entrada la velocidad de cierre de la cuchara p.ej. determinada por el operador o que puede ser determinada por el operador como parámetro de entrada y puede ajustar en función de lea velocidad de cierre de la cuchara una velocidad de elevación de la cuchara de tal modo que durante el proceso de llenado de la cuchara se consiga la carga objetivo necesaria o deseada de la cuchara. El modelo usado para ello puede estar concebido de tal modo que recurre tanto a la velocidad de cierre de la cuchara como a otros valores de sensores.
En otro ejemplo de realización preferible es concebible que el personal de servicio de la grúa pueda controlar la velocidad de cierre de la cuchara. De este modo, de forma ventajosa es posible para el personal de servicio o el operador de la grúa alimentar al procedimiento de acuerdo con la invención señales de control o valores de entrada correspondientes mediante la velocidad de cierre de la cuchara introducida por él, por ejemplo mediante una consola de entrada.
En otro ejemplo de realización preferible es concebible que durante el servicio de la grúa se optimicen de forma continua parámetros del modelo en función de una desviación del objetivo, siendo la desviación del objetivo una desviación entre la carga objetivo que va a elevarse y una carga realmente elevada.
El procedimiento comprueba de este modo automáticamente la efectividad de su modelo y puede adaptar correspondientemente los parámetros del modelo en el servicio en curso de tal modo que se minimice una desviación entre las cargas realmente elevadas y una carga objetivo deseada o determinada.
En otro ejemplo de realización es concebible que mediante el modelo se detecten otras entradas de sensores o valores de señores, como el peso de la cuchara y/o el ángulo de entrada del material y/o la profundidad de penetración en el material.
De este modo, de forma ventajosa es posible aumentar la precisión del modelo y, por lo tanto, la efectividad del servicio de la grúa. No obstante, en principio no son necesarios sensores adicionales y el procedimiento puede emplearse en grúas conocidas por lo demás por el estado de la técnica con los sensores previstos a modo estándar en las mismas.
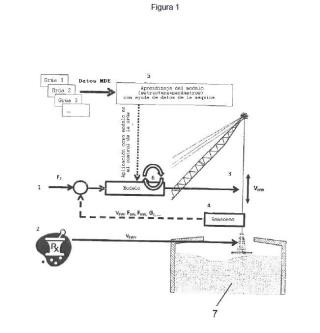
A continuación, se explicarán otros detalles y ventajas de la invención con ayuda de la Figura.
Como puede verse en el diagrama de bloques de la única Figura 1, se especifica de acuerdo con el procedimiento una carga objetivo Fz. Esta especificación puede realizarse de forma automática mediante una regulación/un control de la grúa y p.ej. con ayuda de una tabla de cargas portadas en función de la descarga de la grúa. No obstante, la especificación de la carga objetivo Fz también puede definirse manualmente, siendo introducida la carga objetivo Fz deseada, p.ej. por parte de un operador o conductor de la grúa.
Después de haber llevado el operador la pala o la cuchara 8 mediante el control al producto a granel 7, comienza a cerrar la cuchara 8. La regulación/el control detecta el inicio del proceso de cargar con ayuda de las fuerzas de cierre de la cuchara 8 que van en aumento. A partir de este momento, el operador controla mediante un elemento de control, como p.ej. una palanca de mando el proceso de cierre de la cuchara 8 especificando la velocidad de cierre deseada de la cuchara 8 (vSwv) en una etapa de trabajo 2.
A partir de los valores de sensores disponibles, como p.ej. la velocidad de cierre actual de la cuchara vSWi, de la fuerza en el mecanismo de cierre FSwi, de la fuerza en el mecanismo de retención Fhw o del grado de cierre de la cuchara Gs y de la carga objetivo Fz especificada pretendida, un modelo calcula durante todo el proceso de cierre de forma continua el cambio en el tiempo en...
Reivindicaciones:
1.- Procedimiento para influir en el volumen de llenado de una cuchara, en particular de una cuchara de material a granel de una grúa, comprendiendo la cuchara al menos un mecanismo de elevación y cierre, caracterizado por que el volumen de llenado de la cuchara se ajusta durante un proceso de cierre de la cuchara mediante regulación/control de la altura de elevación de la cuchara, siendo la velocidad de elevación de la cuchara y/o la altura de elevación de la cuchara el parámetro de regulación.
2.- Procedimiento de acuerdo con la reivindicación 1, caracterizado por que en función de los valores de sensores medidos se determina un cambio en el tiempo necesario de la altura de elevación de la cuchara para alcanzar una carga objetivo (Fz) que va a elevarse por la grúa de forma continua con ayuda de un modelo.
3.- Procedimiento de acuerdo con la reivindicación 1 o 2, caracterizado por que en función de la velocidad de cierre de la cuchara se determina un cambio en el tiempo necesario de la altura de elevación de la cuchara para alcanzar una carga objetivo (Fz) que va a elevarse por la grúa de forma continua con ayuda de un modelo.
4.- Procedimiento de acuerdo con la reivindicación 3, caracterizado por que la velocidad de cierre de la cuchara puede ser controlada por el personal de servicio de la grúa.
5.- Procedimiento de acuerdo con una de las reivindicaciones 2 a 4, caracterizado por que durante el servicio de la grúa se optimizan continuamente parámetros del modelo en función de una desviación del objetivo, siendo la desviación del objetivo una desviación entre la carga objetivo (Fz) que va a elevarse y una carga realmente elevada.
6.- Procedimiento de acuerdo con una de las reivindicaciones 2 a 5, caracterizado por que mediante el modelo se detectan entradas de sensores o valores de sensores, como el peso de la cuchara y/o el ángulo de entrada en el material y/o la profundidad de penetración en el material.
Patentes similares o relacionadas:
Dispositivo de recogida de materiales ferrosos, del 18 de Octubre de 2017, de FERNIE, S.L.: Dispositivo de recogida de materiales ferrosos, que comprende un cuerpo central fijado a un plato electroimán , en el borde del plato electroimán pivotean una […]
 Procedimiento para influir en el volumen de llenado de cuchara en equipos elevadores con mecanismos de elevación de cuchara de dos motores, del 23 de Mayo de 2012, de KIROW ARDELT GmbH: Procedimiento para influir en el volumen de llenado de cuchara en equipos elevadores con mecanismos deelevación de cuchara de dos motores, caracterizado […]
Procedimiento para influir en el volumen de llenado de cuchara en equipos elevadores con mecanismos de elevación de cuchara de dos motores, del 23 de Mayo de 2012, de KIROW ARDELT GmbH: Procedimiento para influir en el volumen de llenado de cuchara en equipos elevadores con mecanismos deelevación de cuchara de dos motores, caracterizado […]
UNIDAD DE RECOGIDA, DE LIMPIEZA Y DE CALIBRADO DE CUBAS DE ELECTROLISIS UTILIZADA PARA LA PRODUCCION DE ALUMINIO., del 16 de Julio de 2006, de REEL S.A. ASMI: Unidad de recogida, de limpieza y de calibrado de las cubas de electrólisis, y en particular de los orificios anódicos cuando tiene lugar el reemplazado de los ánodos […]
CUCHARA DE TENAZA., del 16 de Agosto de 1995, de BAKKER HYDRAULIC B.V.: SE PRESENTA UNA CUCHARA DE TENAZA QUE COMPRENDE: UNA ARMADURA CON MEDIOS DE SUJECION PARA ACOPLARLA A UN DISPOSITIVO DE ALOJAMIENTO; DOS MANDIBULAS SOPORTADAS […]
DISPOSITIVO DE MANEJO DE MATERIAL A GRANEL QUE SE MATERIALIZA EN UN RECIPIENTE A PRESION., del 1 de Abril de 1995, de INDUSTOR AB: AL MANIPULAR MATERIAL DE VOLUMEN SE UTILIZA UN CONTENEDOR A PRESION QUE INCLUYE COMO MINIMO DOS ELEMENTOWS Y SE SUMINISTRA CON EQUIPO […]
PINZAS., del 1 de Noviembre de 1994, de BAKKER HYDRAULIC B.V.: EL INVENTO SE REFIERE A UNAS PINZAS QUE CONSTAN DE: UN ARMAZON CON UN ELEMENTO DE FIJACION PARA ACOPLAR EL DISPOSITIVO ELEVADOR; DOS MORDAZAS […]
GARFIO CON DISPOSITIVO DE PERFORACION INTEGRADO PARA EL MANEJO DE CHATARRA, del 1 de Agosto de 1994, de COMPAGNIE FRANCAISE DES FERRAILLES: EN EL INTERIOR DEL CUERPO CENTRAL 2 DEL GARFIO 1, ABIERTO EN SU EXTREMO INFERIOR, ESTA DISPUESTO UN GATO HIDRAULICO 13 DE DOBLE EFECTO ORIENTADO VERTICALMENTE. EL EXTREMO […]
 ACCIONAMIENTO BASCULANTE HIDRAULICO PARA UNA CUCHARA, del 8 de Marzo de 2010, de KINSHOFER GREIFTECHNIK GMBH & CO. KG: Accionamiento basculante hidráulico para una cuchara, que tiene dos brazos de agarre que pueden moverse a modo de tenazas, especialmente […]
ACCIONAMIENTO BASCULANTE HIDRAULICO PARA UNA CUCHARA, del 8 de Marzo de 2010, de KINSHOFER GREIFTECHNIK GMBH & CO. KG: Accionamiento basculante hidráulico para una cuchara, que tiene dos brazos de agarre que pueden moverse a modo de tenazas, especialmente […]