PROCEDIMIENTO PARA LA MANIPULACION AUTOMATICA DE UNA CARGA DE UNA GRUA CON AMORTIGUACION DEL MOVIMIENTO PENDULAR DE LA CARGA Y DISPOSITIVO PLANIFICADOR DE LA TRAYECTORIA.
Procedimiento para la manipulación de una carga, que está colgada en un cable portador de la carga,
que pertenece a una grúa o a una excavadora, con un mecanismo giratorio para hacer girar a la grúa o a la excavadora, con un mecanismo de pluma basculante para el alzamiento o bien para la inclinación de un aguilón y con un mecanismo de elevación para levantar o bien para hacer descender la carga, que está colgada del cable, con una regulación controlada por medio de ordenador para la amortiguación del movimiento pendular de la carga, que presenta un dispositivo planificador de la trayectoria, caracterizado porque comprende las etapas siguientes:
- la determinación del espacio de trabajo por medio de la elección de dos puntos,
- la determinación de uno de los dos puntos como punto de destino por medio de la especificación del sentido por medio de una palanca de mano,
- la especificación de las velocidades teóricas para el mecanismo de rotación y para el mecanismo de pluma basculante por medio de las señales de la palanca de mano de tal manera, que la carga pueda moverse libremente en todo el espacio de trabajo,
- la modificación automática de las velocidades teóricas en función del intervalo de rotación remanente y/o de la zona radial hasta la posición de destino y de la trayectoria de frenado necesaria
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06005296.
Solicitante: LIEBHERR-WERK NENZING GMBH.
Nacionalidad solicitante: Austria.
Dirección: DR.-HANS-LIEBHERR-STRASSE 1,6710 NENZING.
Inventor/es: SAWODNY, OLIVER, SCHNEIDER, KLAUS, HILDEBRANDT,ALEXANDER, NEUPERT,JORG.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Marzo de 2006.
Fecha Concesión Europea: 20 de Enero de 2010.
Clasificación Internacional de Patentes:
- B66C13/06B
- B66C13/48 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Control automático del accionamiento de las grúas para producir un ciclo de trabajo único o repetido; Control por programación.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento para la manipulación automática de una carga de una grúa con amortiguación del movimiento pendular de la carga y dispositivo planificador de la trayectoria.
La invención se refiere a un procedimiento para la manipulación de una carga, que está colgada en un cable portador, que pertenece a una grúa o a una excavadora, cuyo procedimiento presenta una regulación controlada por medio de un ordenador para la amortiguación del movimiento pendular de la carga y un dispositivo planificador de la trayectoria y, de manera especial, se refiere a un procedimiento para la manipulación automática de la carga.
La invención comprende una amortiguación del movimiento pendular de la carga en las grúas o en las excavadoras, que permite un movimiento de la carga, que está colgada de un cable, con tres grados de libertad como mínimo. Tales grúas o excavadoras presentan un mecanismo giratorio, que puede estar asentado sobre un mecanismo de traslación, el cual sirve para llevar a cabo el giro de la grúa o de la excavadora. Por otra parte está presente un mecanismo de pluma basculante para alzar o bien para inclinar un aguilón. Por último, la grúa o la excavadora comprende un mecanismo de elevación para elevar o bien para hacer descender la carga, que está colgada del cable. Las grúas o las excavadoras de este tipo encuentran aplicación en diversas realizaciones. En esta caso pueden citarse, de manera ejemplificativa, las grúas móviles para puertos de mar, las grúas para buques, las grúas de costa, las grúas móviles sobre orugas o bien las excavadoras de cuchara de arrastre.
Cuando se lleva a cabo la manipulación de una carga, que está colgada de un cable, por medio de una grúa o de una excavadora de este tipo, se generan oscilaciones que, por un lado, se deben al movimiento de la grúa o de la excavadora propiamente dicha o que se deben también a efectos perturbadores externos, tal como por ejemplo el viento. En el pasado se han llevado a cabo ya intentos para reprimir los movimientos pendulares en las grúas de carga.
De este modo, la publicación DE 127 80 79 describe una disposición para reprimir de manera automática los movimientos pendulares de una carga que está colgada por medio de un cable de un punto de suspensión del cable, que puede moverse en un plano horizontal, con ocasión del movimiento del punto de suspensión del cable al menos en una coordenada horizontal, en cuya disposición es influenciada la velocidad del punto de suspensión del cable en el plano horizontal por medio de un circuito de regulación en función de una magnitud derivada del ángulo de desviación del cable portador de la carga con respecto a la vertical final.
La publicación DE 20 22 745 muestra una disposición para reprimir las oscilaciones pendulares de una carga, que está colgada por medio de un cable del carro portacargas de una grúa, cuyo órgano motor está equipado con un dispositivo cuentarrevoluciones y con un dispositivo para la regulación de la trayectoria, con una disposición de regulación, que acelera al carro portacargas, teniendo en consideración los períodos de las oscilaciones durante una primera parte de la trayectoria recorrida por el carro portacargas, y que lo retarda durante una última parte de esta trayectoria, de tal manera que el movimiento del carro portacargas y las oscilaciones de la carga se anulan en el punto de destino.
Se ha dado a conocer por la publicación DE 321 04 50 un equipo en aparejos de elevación para el control automático del movimiento del dispositivo portador de la carga con estabilización del movimiento pendular de la carga, que presenta con ocasión de la aceleración o del frenado de la carga que está colgada del mismo, durante un intervalo de tiempo de aceleración y respectivamente, durante un intervalo de tiempo de frenado. La idea básica se apoya sobre el péndulo matemático simple. Para llevar a cabo el cálculo del movimiento no se toman en consideración ni la masa del carro portacargas ni la masa de la carga. No se toman en consideración ni el rozamiento de Coulomb ni el rozamiento proporcional a la velocidad del órgano motor del carro portacargas o del órgano motor del puente.
Con objeto de poder transportar del modo más rápidamente posible desde el punto inicial hasta el punto de destino un cuerpo de carga, la publicación DE 322 83 02 propone llevar a cabo el control del número de revoluciones del motor de accionamiento del carro de la grúa por medio de una calculadora de tal manera que el carro de la grúa y el dispositivo portador de la carga se muevan con la misma velocidad durante la marcha en el régimen establecido y se alcance en el menor tiempo posible la amortiguación del movimiento pendular. La calculadora, que se conoce por la publicación DE 322 83 02, trabaja de conformidad con un programa de cálculo para resolver las ecuaciones diferenciales que se cumplen para el sistema de oscilación de dos masas no amortiguado, que se forma a partir del carro de la grúa y del cuerpo de carga, no tomándose en consideración ni el rozamiento de Coulomb ni el rozamiento proporcional a la velocidad del órgano motor del carro portacargas o del órgano motor del puente.
En el caso del procedimiento, que ha sido dado a conocer por la publicación DE 37 10 492, se eligen las velocidades entre los puntos de destino sobre la trayectoria de tal manera, que la amplitud de las oscilaciones pendulares es siempre nula una vez se ha recorrido la mitad de la trayectoria total entre el punto de partida y el punto de destino.
El procedimiento, que ha sido dado a conocer por la publicación DE 39 33 527, para la amortiguación de las oscilaciones pendulares de la carga abarca una regulación normal de velocidad-posición.
La publicación DE 691 19 913 se refiere a un procedimiento para el control del ajuste de una carga en movimiento pendular, en el que se forma la desviación entre la posición de la carga teórica y la posición de la carga real en un primer circuito de regulación. Esta desviación es derivada, multiplicada por un coeficiente de corrección y sumada a la posición teórica del soporte móvil. En un segundo circuito de regulación se compara la posición teórica del soporte móvil con la posición real, se multiplica por una constante y se suma a la velocidad teórica del soporte móvil.
La publicación DE 44 02 563 se refiere a un procedimiento para la regulación de mecanismos de traslación eléctricos de aparejos de elevación con una carga, que está colgada de un cable, que genera la trayectoria teórica de la velocidad del carro portacargas de la grúa en base a la ecuación dinámica descrita y lo envía a un dispositivo regulador de la velocidad y de la corriente eléctrica. Por otra parte, el equipo de cálculo puede ser ampliado con un regulador de posición para la carga.
El procedimiento de regulación, que ha sido dado a conocer por las publicaciones DE 127 80 79, DE 393 35 27 y DE 691 19 913 requiere un sensor del ángulo del cable para llevar a cabo la amortiguación pendular de la carga. En la realización ampliada de conformidad con la publicación DE 44 02 563 también es necesario este sensor. Puesto que este sensor del ángulo del cable provoca costes considerables, es ventajoso que el movimiento pendular de la carga pueda ser compensado también sin este sensor.
El procedimiento de la publicación DE 44 02 563 en la versión básica, requiere también, al menos, la velocidad del carro portacargas de la grúa. Así mismo en la publicación DE 20 22 745 se requieren varios sensores para la amortiguación del movimiento pendular de la carga. De este modo, en el caso de la publicación DE 20 22 745 tiene que recogerse al menos un número de revoluciones y una medición de la posición del carro portacargas de la grúa.
De la misma manera, la publicación DE 37 10 492 requiere como sensor adicional al menos la posición del carro portacargas o bien la posición del puente.
Como alternativa a este procedimiento, otra hipótesis, que ha sido dada a conocer por ejemplo en la publicación DE 32 10 450 y en la publicación DE 322 83 02, propone resolver las ecuaciones diferenciales en las que está basado el sistema y determinar en base a las mismas una estrategia de control para el sistema con objeto de reprimir el movimiento pendular de la carga, midiéndose, en el caso de la publicación DE 32 10 450, la longitud del cable y midiéndose, en el caso de la publicación DE 322 83 02, la longitud del cable y la masa de la carga. Sin embargo, en estos sistemas no se tiene en consideración los efectos de rozamiento no despreciables en el sistema de la...
Reivindicaciones:
1. Procedimiento para la manipulación de una carga, que está colgada en un cable portador de la carga, que pertenece a una grúa o a una excavadora, con un mecanismo giratorio para hacer girar a la grúa o a la excavadora, con un mecanismo de pluma basculante para el alzamiento o bien para la inclinación de un aguilón y con un mecanismo de elevación para levantar o bien para hacer descender la carga, que está colgada del cable, con una regulación controlada por medio de ordenador para la amortiguación del movimiento pendular de la carga, que presenta un dispositivo planificador de la trayectoria, caracterizado porque comprende las etapas siguientes:
2. Procedimiento según la reivindicación 1, caracterizado porque tanto la señal de la palanca de mano así como, también, los puntos de partida/de destino son evaluados en el espacio de trabajo y porque, en base a estas informaciones se calculan señales de referencia modificadas para la velocidad de la carga en el sentido de rotación y en el sentido radial, generándose en los dispositivos planificadores de la trayectoria, trayectorias teóricas a partir de las señales de referencia, cuyas trayectorias teóricas son transformadas en los dispositivos reguladores axiales para el mecanismo giratorio y para el mecanismo de pluma basculante, por medio de un control piloto, en las correspondientes tensiones de activación para los órganos motores.
3. Procedimiento según la reivindicación 1 o según la reivindicación 2, caracterizado porque la posición teórica de la carga puede subdividirse en componentes, cada uno de los cuales es tomado en consideración en el dispositivo regulador axial para el mecanismo giratorio o bien para el mecanismo de pluma basculante.
4. Procedimiento según la reivindicación 3, caracterizado porque en el dispositivo automático planificador de la trayectoria se modifica la señal de la palanca de mano reducida en función del intervalo de rotación remanente hasta la posición de destino y de la trayectoria de frenado necesaria.
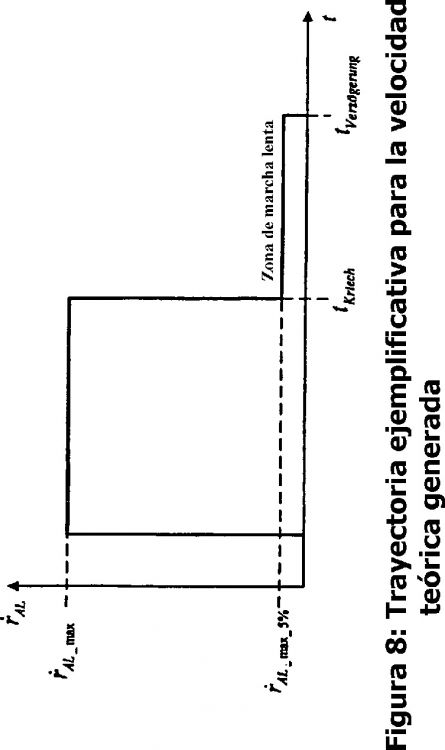
5. Procedimiento según la reivindicación 3 o 4, caracterizado porque en el dispositivo automático planificador de la trayectoria la señal de la palanca de mano reducida se adapta de tal manera, que se retarde el movimiento del mecanismo de pluma basculante con objeto de alcanzar la posición de destino.
6. Procedimiento según la reivindicación 5, caracterizado porque se ha previsto en el caso del retardo como zona de seguridad una denominada zona de marcha lenta, en la que el mecanismo de pluma basculante se ralentiza desde la velocidad máxima hasta una fracción de la velocidad máxima.
Patentes similares o relacionadas:
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Sistema y método de elevación de material, del 8 de Mayo de 2019, de COLUMBUS MCKINNON CORPORATION: Un sistema de manejo de material que comprende un dispositivo de elevación de material; teniendo dicho dispositivo de elevación de […]
Control de grúa, del 7 de Diciembre de 2016, de PALFINGER AG: Control de grúa para una grúa especialmente una grúa de carga, con un primer modo de servicio en el cual la grúa puede ser manejada […]
Sistema electrónico para el mantenimiento a distancia de una grúa, del 18 de Marzo de 2015, de FASSI GRU S.p.A: Sistema electrónico para el mantenimiento a distancia de una grúa , comprendiendo el sistema: - un ordenador configurado para: • transmitir […]
Procedimiento para recoger una grúa, del 29 de Mayo de 2014, de DEMAG CRANES & COMPONENTS GMBH: Procedimiento para grúas desplazables a lo largo de una vía fija de desplazamiento con el que el operador puede recoger hacia […]
Procedimiento para el transbordo de cargas en un almacén para contenedores, del 28 de Agosto de 2013, de GOTTWALD PORT TECHNOLOGY GMBH: Procedimiento para el trasbordo de cargas en un almacén para contenedores , en especial paracontenedores normalizados, en el que una grúa apiladora de contenedores […]
Dispositivo y procedimiento de regulación del desplazamiento de una carga suspendida, del 24 de Junio de 2013, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Dispositivo de regulación del desplazamiento de una carga suspendida por cables de una carretilla , quees móvil según un primer eje (X) horizontal, en un […]
 Un método y sistema para optimizar contenedores en un bloque, del 10 de Abril de 2013, de ABB RESEARCH LTD.: Un método para optimizar la posición de una pluralidad de contenedores en un bloque en un puerto provisto con un sistema logístico de puerto (PLS), en el que al menos […]
Un método y sistema para optimizar contenedores en un bloque, del 10 de Abril de 2013, de ABB RESEARCH LTD.: Un método para optimizar la posición de una pluralidad de contenedores en un bloque en un puerto provisto con un sistema logístico de puerto (PLS), en el que al menos […]