Sistema para la detección automática de ciclos de carga de una máquina para transferir cargas.
Sistema para la detección automática de ciclos de carga de una máquina para transferir cargas (3),
donde la máquina comprende un dispositivo de elevación (13) para elevar la carga (3) y un dispositivo transportador (5) para el desplazamiento horizontal de la carga (3), con:
una detección del cambio de carga para detectar automáticamente un cambio de carga al menos en base a las señales de salida de un dispositivo de medición de la fuerza de elevación,
una detección de la posición de carga que detecta la posición de la carga (3) al menos en una dirección horizontal, y una detección del ciclo de carga para la detección automática de un ciclo de carga, donde la detección del ciclo de carga tiene lugar al menos en base a las señales de salida de la detección del cambio de carga y de la detección de la posición de carga,
caracterizado porque la posición de la carga (3) puede ser detectada como el punto de suspensión de la carga mediante la detección del ciclo de carga cuando fue reconocido un cambio de carga positivo, donde el cambio de carga positivo es evaluado como el inicio de un nuevo ciclo de carga en base a una consulta relativa a si la carga fue desplazada una distancia predeterminada con respecto al punto de suspensión de la carga en la dirección horizontal.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10008610.
Solicitante: LIEBHERR-WERK NENZING GMBH.
Nacionalidad solicitante: Austria.
Dirección: DR.-HANS-LIEBHERR-STRASSE 1 6710 NENZING AUSTRIA.
Inventor/es: SCHNEIDER, KLAUS, SONDEREGGER,JÜRGEN, AMANN,MARTIN, SCHNELLER,MATHIAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Utilización de dispositivos indicadores de posicionado o de pesada (en los ganchos de grúa B66C 1/40; en los mecanismos de seguridad B66C 15/00; aparatos de pesada G01G; sistemas indicadores a distancia en general G08).
- B66C15/06 B66C […] › B66C 15/00 Mecanismos de seguridad (para mecanismo de enrollamiento de cuerdas, cables o de cadenas B66D 1/54). › Disposición o utilización de dispositivos de aviso.
- B66C23/90 B66C […] › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › Dispositivos para indicar o limitar el movimiento de elevación del ángulo del aguilón o brazo.
PDF original: ES-2527598_T3.pdf
Fragmento de la descripción:
Sistema para la detección automática de ciclos de carga de una máquina para transferir cargas La presente invención hace referencia a un sistema para la detección automática de ciclos de carga de una máquina para transferir cargas, donde la máquina comprende un dispositivo de elevación para elevar la carga y un dispositivo transportador para el desplazamiento horizontal de la carga. El dispositivo transportador puede consistir en particular en el mecanismo de rotación y/o en el mecanismo basculante de un aparato elevador.
El sistema comprende una detección del cambio de carga para detectar automáticamente un cambio de carga al menos en base a las señales de salida de un dispositivo de medición de la fuerza de elevación, una detección de la posición de carga que detecta la posición de la carga al menos en una dirección horizontal, y una detección del ciclo de carga para la detección automática de un ciclo de carga, donde la detección del ciclo de carga tiene lugar al menos en base a las señales de salida de la detección del cambio de carga y de la detección de la posición de carga.
Por el estado del arte son conocidos sistemas para detectar los ciclos de carga de grúas volcadoras, en los cuales el inicio y el final de un ciclo se detectan al superarse un umbral de carga fijo o al ubicarse por debajo del mismo, mediante un peso tarado del medio de suspensión de carga. El conductor de la grúa debe ingresar además un umbral de activación que al ser atravesado detecta la masa de carga, definiéndola como el peso de carga del ciclo de carga. Como umbral de activación se utiliza un ángulo de rotación de la grúa.
Los sistemas conocidos presentan una pluralidad de problemas vinculados en particular a la necesidad de una interacción manual por parte del conductor de la grúa. De este modo, con frecuencia el umbral de activación, así como el ángulo de rotación, no es fijado o es fijado en una posición incorrecta, de manera que no tiene lugar ningún registro o éste se encuentra alterado. Además, para la determinación del punto de inicio y del punto de detención del ciclo se utilizan umbrales de carga muy elevados para evitar una detección errónea de los ciclos de carga. Sin embargo, puesto que el peso de la carga útil con frecuencia es considerablemente menor que el peso del medio de suspensión de carga y del medio de transferencia, y la dimensión es menor que la carga máxima, no puede de este modo garantizarse una detección fiable de los ciclos de carga. El sistema de medición debe diseñarse además con gran precisión.
Otros problemas resultan de la tara manual del peso de los medios de suspensión de la carga y de los medios de sujeción, la cual con frecuencia representa una fuente de error precisamente al cambiar el medio de suspensión de carga.
Por la solicitud DE 60100577T2 se conoce ya una máquina de transferencia en donde es detectada la cantidad de elevaciones.
Por tanto, es objeto de la presente invención proporcionar un sistema para la detección automática de los ciclos de carga de una máquina para transferir cargas, el cual en lo posible no requiera una interacción manual y sin embargo detecte con elevada fiabilidad los ciclos de carga y/o el peso del medio de suspensión de carga.
De acuerdo con la invención este objeto se alcanzará a través de un sistema según la reivindicación 1.
La presente invención comprende un sistema para la detección automática de los ciclos de carga de una máquina para transferir cargas, donde la máquina comprende un dispositivo de elevación para elevar la carga y un dispositivo transportador para el desplazamiento horizontal de la carga.
El sistema acorde a la invención puede emplearse por ejemplo en una grúa. El dispositivo de elevación puede consistir por ejemplo en el mecanismo de elevación de la grúa y el dispositivo transportador puede tratarse por ejemplo del mecanismo de rotación y/o del mecanismo basculante de la grúa. A través del movimiento del mecanismo de elevación puede ser elevada y bajada la carga que está suspendida en el cable de la grúa. A través de la rotación y/o del balanceo hacia arriba y hacia abajo del brazo de la grúa la carga puede ser desplazada al menos en una dirección horizontal.
El sistema acorde a la invención puede utilizarse sin embargo no sólo en una grúa, sino también en otras máquinas de transferencia, en particular en máquinas de construcción, dispositivos transportadores, carretillas de manipulación, grúas Reach Stacker y/o cargadoras con ruedas. Todos estos aparatos presentan un dispositivo de elevación mediante el cual una carga puede ser elevada y descendida nuevamente, así como un dispositivo transportador para el desplazamiento horizontal de la carga.
El sistema acorde a la invención comprende una detección del cambio de carga para detectar automáticamente un cambio de carga al menos en base a las señales de salida de un dispositivo de medición de la fuerza de elevación,
una detección de la posición de carga que detecta la posición de la carga al menos en dirección horizontal y una detección del ciclo de carga para la detección automática de un ciclo de carga, donde la detección del ciclo de carga tiene lugar al menos en base a las señales de salida de la detección de cambio de carga y de la detección de la posición de carga. De acuerdo con la invención se prevé que la detección del ciclo de carga detecte la posición de la carga como punto de suspensión de la carga cuando fue reconocido un cambio de carga positivo. Un cambio de carga positivo es evaluado como el inicio de un nuevo ciclo de carga en base a una consulta relativa a si la carga fue desplazada una distancia predeterminada con respecto al punto de suspensión de la carga en la dirección horizontal.
De manera ventajosa, el sistema acorde a la invención detecta un cambio de carga positivo sólo como el inicio de un nuevo ciclo de carga cuando la carga, después de detectar el cambio de carga positivo, fuese desplazada una distancia predeterminada hacia al punto de suspensión de la carga en la dirección horizontal. De este modo se evita que, en el caso de una elevación y un descenso repetidos de la carga en el punto de suspensión de la carga, lo cual puede ocurrir por ejemplo para posicionar mejor un dispositivo de suspensión de la carga, sea detectado cada vez un nuevo ciclo de carga. Gracias a ello el sistema acorde a la invención es considerablemente más seguro con respecto a la detección de los ciclos de carga. Asimismo, ya no es necesario predeterminar un umbral de activación de forma manual. Más bien, a través de la comparación de la posición actual de la carga con el punto de suspensión de la carga almacenado y de la consulta relativa a si la carga fue desplazada una distancia predeterminada con respecto al punto de suspensión de la carga en la dirección horizontal, se alcanza un criterio seguro para un reconocimiento seguro de un nuevo ciclo de carga.
En la presente invención, el umbral de carga para confirmar un ciclo de carga se genera por tanto automáticamente y en función del respectivo punto de suspensión de la carga. La distancia predeterminada con respecto al punto de suspensión de la carga puede consistir por ejemplo en una distancia fija, con respecto a la cual la carga fue desplazada desde el punto de suspensión de la carga. A modo de ejemplo puede tratarse de una distancia de tres metros. En particular la distancia debería ser mayor que el recorrido de maniobras realizado habitualmente para posicionar la carga de forma precisa.
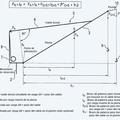
La detección de la posición de carga puede determinar la posición de la carga por ejemplo mediante las coordenadas de la máquina, en el caso de una grúa por ejemplo mediante el ángulo de rotación y el ángulo de basculación del brazo. La posición y/o el movimiento de la carga, así como del medio de suspensión de carga, de manera ventajosa, se determina mediante la posición y/o la velocidad de la punta del brazo. En particular, la posición y/o el movimiento de la carga, así como del medio de suspensión de carga (el cual se requiere sólo en dirección horizontal) , corresponden a la posición y/o a la velocidad de la punta del brazo.
De manera ventajosa, el sistema acorde a la invención presenta además una detección de la velocidad de carga que detecta la velocidad de la carga al menos en una dirección horizontal, donde la detección del ciclo de carga tiene lugar además en base a las señales de salida de la detección de la velocidad de carga. La detección de la velocidad de la carga, de manera ventajosa, puede tener lugar a su vez en base a coordenadas de la máquina, en particular en base al ángulo de rotación y/o al ángulo de basculación,... [Seguir leyendo]
Reivindicaciones:
1. Sistema para la detección automática de ciclos de carga de una máquina para transferir cargas (3) , donde la máquina comprende un dispositivo de elevación (13) para elevar la carga (3) y un dispositivo transportador (5) para el desplazamiento horizontal de la carga (3) , con:
una detección del cambio de carga para detectar automáticamente un cambio de carga al menos en base a las señales de salida de un dispositivo de medición de la fuerza de elevación, una detección de la posición de carga que detecta la posición de la carga (3) al menos en una dirección horizontal, y una detección del ciclo de carga para la detección automática de un ciclo de carga, donde la detección del ciclo de carga tiene lugar al menos en base a las señales de salida de la detección del cambio de carga y de la detección de la posición de carga, caracterizado porque la posición de la carga (3) puede ser detectada como el punto de suspensión de la carga mediante la detección del ciclo de carga cuando fue reconocido un cambio de carga positivo, donde el cambio de carga positivo es evaluado como el inicio de un nuevo ciclo de carga en base a una consulta relativa a si la carga fue desplazada una distancia predeterminada con respecto al punto de suspensión de la carga en la dirección horizontal.
2. Sistema según la reivindicación 1, con una detección de la velocidad de carga que detecta la velocidad de la carga (3) al menos en una dirección horizontal, donde la detección del ciclo de carga tiene lugar además en base a las señales de salida de la detección de la velocidad de carga, donde ventajosamente la detección del ciclo de carga evalúa un cambio de carga positivo como el inicio de un nuevo ciclo de carga en base a la consulta relativa a si la velocidad de carga no excedió un valor predeterminado durante el cambio de carga positivo.
3. Sistema según una de las reivindicaciones precedentes, donde la detección del ciclo de carga determina el final de un ciclo de carga activo en base a una consulta relativa a si ha tenido lugar un cambio de carga negativo.
4. Sistema según una de las reivindicaciones precedentes, donde la detección del ciclo de carga tiene lugar en base a una máquina discreta de estado finito que presenta al menos los siguientes estados: sin carga (3) , cambio de carga positivo reconocido, ciclo de carga activo confirmado.
5. Sistema según una de las reivindicaciones precedentes, donde la detección del ciclo de carga detecta el peso de la carga en base a las señales de salida del dispositivo de medición de la fuerza de elevación, en particular a través de la formación de un valor medio sobre el ciclo de carga activo o sobre un rango parcial del ciclo de carga activo.
6. Sistema según una de las reivindicaciones precedentes con una unidad de detección del medio de suspensión de carga, la cual detecta automáticamente el peso del medio de suspensión de carga (12) .
7. Sistema para la detección automática de cambios del medio de suspensión de carga (12) en una máquina para transferir cargas, donde la máquina comprende un dispositivo de elevación para elevar la carga (3) , con:
un dispositivo de medición de la fuerza de elevación para medir la fuerza de elevación, y una unidad de detección del medio de suspensión de carga, la cual reconoce automáticamente un cambio del medio de suspensión de carga (12) al menos en base a las señales de salida del dispositivo de medición de la fuerza de elevación.
8. Sistema según la reivindicación 7, con una detección de posición, la cual detecta la posición del medio de suspensión de carga (12) al menos en una dirección horizontal, donde la unidad de detección del medio de suspensión de carga reconoce automáticamente un cambio del medio de suspensión de carga (12) al menos en base a las señales de salida del dispositivo de medición de la fuerza de elevación y en base a la detección de posición.
9. Sistema según la reivindicación 7 u 8, donde la detección del medio de suspensión de carga tiene lugar en base a una detección del ciclo de carga, en particular en base a un sistema según una de las reivindicaciones 1 a 6, donde ventajosamente la detección del medio de suspensión de carga detecta la posición del medio de suspensión de carga (12) cuando tiene lugar un cambio de carga negativo, mientras no se presente ningún cambio de carga activo, donde el cambio de carga negativo se evalúa como un cambio a un medio de suspensión de carga (12) más liviano en base a la consulta relativa a si el medio de suspensión de carga (12) fue desplazado una distancia
predeterminada con respecto a la posición detectada en la dirección horizontal después del cambio de carga negativo.
10. Sistema según una de las reivindicaciones 7 a 9, donde la unidad de detección del medio de suspensión de carga detecta un cambio del medio de suspensión de carga (12) en base a una pluralidad de máquinas discretas de estado finito que funcionan de manera paralela, cuyos estados son verificados por una lógica de control de nivel superior.
11. Sistema según una de las reivindicaciones precedentes, donde la detección del ciclo de carga almacena datos del ciclo de carga de cada ciclo de carga detectado en una base de datos, donde la base de datos posibilita una evaluación posterior de los datos.
12. Sistema según la reivindicación 11, donde los datos del ciclo de carga comprenden uno o más de los siguientes datos: peso de la carga, duración del ciclo de carga, posición de inicio y de detención, tiempo de inicio y de detención, peso del medio de suspensión de carga (12) , valores mínimos y máximos de la carga (3) durante el ciclo de carga, distancia de desplazamiento, características de la máquina o de los accionamientos de la máquina.
13. Sistema según la reivindicación 11 ó 12, donde la evaluación de los datos comprende una determinación de uno o más de los siguientes datos: energía / consumo de combustible, peso total de la carga transferida, promedio de la potencia de transferencia, índices de potencia -rendimiento.
14. Máquina de transferencia, con un sistema para la detección automática de ciclos de carga según una de las reivindicaciones precedentes.
15. Método para operar uno de los sistemas según una de las reivindicaciones precedentes.
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
Instalación de transporte de tambor con equipo de supervisión de cable, del 11 de Marzo de 2020, de OLKO-Maschinentechnik GmbH: Instalación de transporte de tambor de un solo cable con un tambor de cable accionado por un accionamiento de cabrestante que comprende un equipo de supervisión […]
Grúa y procedimiento para el monitoreo de la protección contra sobrecargas de una grúa de este tipo, del 8 de Enero de 2020, de Liebherr-Components Biberach GmbH: Grua con una pluma en la cual al menos un medio de recepcion de carga esta colocado de manera que puede elevarse y descender; en […]
Carretillas pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, del 1 de Enero de 2020, de Pfenning Elektroanlagen GmbH: Carretilla pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, con un bastidor , un dispositivo de elevación , que cuelga […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
 Grúa y procedimiento para monitorizar el limitador de sobrecarga de dicha grúa, del 26 de Junio de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa con una pluma en la que al menos un elemento de izado está montado de manera que se puede elevar y descender, en donde un dispositivo limitador […]
Grúa y procedimiento para monitorizar el limitador de sobrecarga de dicha grúa, del 26 de Junio de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa con una pluma en la que al menos un elemento de izado está montado de manera que se puede elevar y descender, en donde un dispositivo limitador […]
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Sistema y método de elevación de material, del 8 de Mayo de 2019, de COLUMBUS MCKINNON CORPORATION: Un sistema de manejo de material que comprende un dispositivo de elevación de material; teniendo dicho dispositivo de elevación de […]