CIP-2021 : B25J 15/08 : teniendo elementos en forma de dedos (B25J 15/02, B25J 15/04 tienen prioridad).
CIP-2021 › B › B25 › B25J › B25J 15/00 › B25J 15/08[1] › teniendo elementos en forma de dedos (B25J 15/02, B25J 15/04 tienen prioridad).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 15/00 Cabezas de aprehensión.
B25J 15/08 · teniendo elementos en forma de dedos (B25J 15/02, B25J 15/04 tienen prioridad).
CIP2021: Invenciones publicadas en esta sección.
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Mecanismo de sincronización para mordazas de pinza.
(01/07/2020) Un dispositivo para agarrar un objeto, que comprende:
un cuerpo principal que tiene una primera y una segunda placa terminal (12A, 12B);
una placa base que se extiende entre la primera placa terminal (12A) y la segunda placa terminal (12B); al menos un carril de guía (28A, 28B) que se extiende entre la primera placa terminal (12A) y la segunda placa terminal (12B);
una primera mordaza (14A) y una segunda mordaza (14B), que reciben cada una dicho al menos un carril de guía (28A, 28B), un primer conjunto de polea y un segundo conjunto de polea (16'), unidos respectivamente a la placa base ; y
un bucle de cadena unido respectivamente al primer conjunto de polea y al segundo conjunto de polea (16 '), incluyendo dicho bucle de cadena :
…
Manipulador de alimentos en un almacén.
(13/05/2020) Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que al menos una está asociada con uno de dichos alimentos (1a); estando dicho manipulador caracterizado porque comprende
- una estación de análisis de dicho alimento (1a);
- un miembro de recogida de dicho alimento (1a) de dicha estación de almacenamiento (1b) adecuado para colocar dicho alimento (1a) en dicha estación de análisis ;
- un transportador de dicho manipulador adecuado para colocar dicho miembro de recogida , dicha estación de análisis y dicho dispositivo de inspección en correspondencia…
Mecanismo de sujeción de cilindro de huecograbado accionado por un único motor.
(26/02/2020) Un mecanismo de sujeción de cilindro de huecograbado accionado por un único motor que se usa para una unidad de procesamiento de un sistema de procesamiento de elaboración de placas por huecograbado totalmente automático para fabricar un rodillo de elaboración de placas realizando una serie de procesos en un rodillo de elaboración de placas sin procesar, comprendiendo el mecanismo de sujeción de cilindro de huecograbado accionado por un único motor:
un par de conos de sujeción (16a, 16b) proporcionados para ser opuestos entre sí, para sujetar ambas superficies de extremo (14a, 14b) del rodillo de elaboración…
DISPOSITIVO DE SUJECIÓN DE OBJETOS PARA PISTAS DE TRANSFERENCIA Y MÁQUINA PARA MANIPULAR OBJETOS ASOCIADA AL MISMO.
(11/02/2020). Solicitante/s: MULET VALLES,TOMAS. Inventor/es: MULET VALLES,TOMAS, MARTÍNEZ MÉNDEZ,Fernando.
Dispositivo de sujeción de objetos para pistas de transferencia, que comprende al menos un carro de transferencia configurado para moverse en circuito cerrado de forma independiente a lo largo de una pista de transferencia (T); un primer elemento de sujeción y un segundo elemento de sujeción vinculados al carro de transferencia , configurados para sujetar un objeto (O) entre ambos. Dicho dispositivo comprende un mecanismo de adaptación configurado para ajustar una distancia (d) entre el primer elemento de sujeción y el segundo elemento de sujeción a la geometría, forma y/o tamaño del objeto (O) a sujetar.
PDF original: ES-2741509_A1.pdf
(12/06/2019) Una pinza para satélites que consta de una base a la que se acopla con bisagra, como mínimo, un dedo móvil , que consta, como mínimo, de dos falanges acopladas la una a la otra y mecánicamente activadas mediante una biela de transmisión lineal , en la que el dedo móvil consta de, como mínimo, una falange distal y una falange proximal , la falange distal está acoplada con bisagra al primer extremo de la falange proximal con un segmento de guía más corto y uno más largo , ambos segmentos de guía son mutuamente paralelos y forman con las dos falanges un paralelogramo móvil, en el que el extremo libre del segmento de guía más largo se extiende más allá de la falange proximal…
Transporte de recipientes de líquido en un aparato de análisis automático.
(02/04/2019) Aparato de análisis automático que comprende un primer y un segundo dispositivo de recepción con respectivamente una pluralidad de posiciones de recepción para recipientes de líquido, y un dispositivo fijado en un brazo de transferencia que puede desplazarse automáticamente, para la transferencia de un recipiente de líquido desde una posición de recepción en el primer dispositivo de recepción a una posición de recepción en el segundo dispositivo de recepción , donde el dispositivo para la transferencia de un recipiente de líquido comprende un elemento de sujeción por apriete pasivo con dos brazos del elemento de sujeción , entre los cuales, a través de un desplazamiento…
(20/02/2019) Un dedo mecánico que comprende:
un nudillo ,
un elemento proximal ,
una varilla ,
teniendo el nudillo
un primer pivote y
un segundo pivote separado por
una primera distancia predeterminada,
teniendo el elemento proximal un extremo de nudillo acoplado de forma pivotante al primer pivote de nudillo y
un tercer pivote a una distancia longitudinal variable desde el primer pivote ,
teniendo la varilla un extremo de nudillo acoplado de forma pivotante al segundo pivote de nudillo y un extremo de elemento distal acoplado de forma pivotante al tercer pivote ,
un generador de…
(16/10/2018) Garra para levantar y bajar cargas, con la siguiente configuración:
- ésta comprende una pieza de acoplamiento que sirve para acoplar a una carga y una pieza de conexión que sirve para conectar con un elemento de tope,
- la pieza de conexión es guiada de forma móvil en la pieza de acoplamiento a lo largo de un eje de movimiento entre una primera posición final (E1) y una segunda posición final (E2), estando en la primera posición final los extremos de dichas piezas enfrentados mutuamente más separados que en la segunda posición final,
- en la pieza de acoplamiento están presentes al menos dos elementos de pestillo…
Pinza mejorada para prensa de estampación con sistema transfer.
(14/12/2016) Pinza para una prensa de estampación con sistema transfer, que comprende unos brazos (3a,3b) de sujeción de una chapa a estampar y un cuerpo de soporte que está provisto de una cavidad interior donde se aloja un cilindro fluido-dinámico, siendo susceptible dicho cilindro de accionar un primer brazo (3a) de sujeción de la pinza que está unido articulado a dicho cuerpo de soporte, en el que dicho primer brazo (3a) de sujeción está configurado de modo que comprende un extremo provisto de por lo menos un orificio pasante para una punta de sujeción de la chapa y un conjunto de tuerca y tornillo para fijar superiormente dicha punta de sujeción en el interior del orificio, comprendiendo el extremo opuesto del primer brazo (3a) de sujeción un ranura que sirve de guía para un rodamiento…
MANO PROTÉSICA MULTIARTICULADA MOTORIZADA Y CONTROLABLE COMPLETAMENTE POR EL USUARIO.
(17/11/2016) Una mano protésica multiarticuiada motorizada y controlable completamente por el usuario, del tipo conformada por una sección de antebrazo que define un sockeí de conexión en su extremo distal, adaptado para recibir y fijar firmemente el muñón del antebrazo de un paciente amputado y que comprende en su extremo proximal un medio de conexión que define una sección de muñeca que se acopla pivotalmente en la mano protésica, la cual comprende una pluralidad de dedos articulados; caracterizada el dedo pulgar se conforma por un metacarpio, una falange próxima! y una falange distal conectadas entre si mediante conexiones articuladas tipo rotula; y los dedos índice, medio, anular y meñique, están conformados éstos por una…
(10/08/2016) Un aparato de mecanización que incorpora un robot articulado que incorpora un instrumento de captura para capturar una pieza de trabajo dispuesta en un extremo (100A) del brazo del mismo y que está adaptado para sacar la pieza de trabajo de los moldes y una unidad de mecanización equipada en una porción fija situada dentro de una zona alcanzable del brazo del robot articulado, en el que la unidad de mecanización incorpora una herramienta de trabajo que presenta una porción (21A, 21B, 223A, 223B, 125A, 125B) de perfilado en la que una porción (40T) blanco de mecanización de la pieza de trabajo capturada por el instrumento de captura del robot articulado está adaptada para ser presionada de acuerdo con el control de actitud del robot articulado, y un mecanismo flotante que está…
Dispositivo y procedimiento para separar partes de producto de productos cortados.
(15/01/2016) Dispositivo para la separación de partes de producto de productos cortados, en particular filetes de pescado, comprendiendo un elemento de transporte para transportar en dirección de transporte T los productos cortados y que aún se encuentran juntos, medios de transporte para el transporte transversal de partes de producto en dirección transversal Q transversalmente con respecto a la dirección de transporte T, así como un elemento de transporte para evacuar las partes de producto separadas, caracterizado por que el dispositivo comprende además medios para reconocer la posición de los productos sobre el elemento de transporte , así como para detectar datos específicos de producto y que el medio para transportar transversalmente presenta al menos dos dedos de producto…
Dispositivo articulado para colocación de piezas sanitarias como lavabos y fregaderos.
(04/12/2015) 1. Dispositivo articulado para colocación de piezas sanitarias como lavabos y fregaderos; dotado de un husillo , caracterizado esencialmente porque tiene una manivela en un extremo y un soporte articulado en el otro, y que se soporta mediante unas patas que contienen las tuercas y que convierten el movimiento circular de la manivela en el movimiento longitudinal recto que hace el husillo, y que a su vez giran sobre su propio eje para adaptarse a todo tipo de calados.
2. Dispositivo articulado para colocación de piezas sanitarias como lavabos y fregaderos, según la reivindicación 1, caracterizado por el hecho de que puede soportar el peso de todo tipo de lavamanos, aguamaniles, fregaderos, etc.
3. Dispositivo articulado para la colocación de piezas sanitarias…
(11/03/2015) Mano mecánica para la manipulación de probetas, en especial con forma de tubo, con una base de la mano mecánica, con al menos dos dedos de la mano mecánica, que poseen cada uno un tramo de sujeción para recoger una probeta, dispuestos cada uno en la base de la mano mecánica de manera giratoria alrededor de un eje de rotación del dedo con relación a la base de la mano mecánica, estando dispuestos los tramos de sujeción de los dedos de la mano mecánica de manera no centrada con relación al correspondiente eje de rotación del dedo y con un primer accionamiento para la rotación de los dedos de la mano mecánica, estando acoplados los dedos de la mano mecánica de tal modo entre sí, que son accionados por el accionamiento al mismo tiempo y con la misma velocidad y dirección de rotación,…
(14/08/2013) Un dispositivo de rotación que tiene un actuador tubular que se infla en una dirección de diámetro demanera que una longitud total se acorta mediante el suministro con fluido; un miembro de enclavamiento sobreel cual se dispone el actuador y al cual se fija un lado de parte extrema (14b) del actuador , un miembrorotatorio , acoplado, con posibilidad de giro, al miembro de enclavamiento en el otro lado de parte extrema(14a) del actuador ; y un material de alambre para conectar la otra parte extrema (14a) del actuador con el miembro rotatorio ; en donde el miembro de enclavamiento esta provisto…
Aparato de transferencia de recipientes con compensación de posicionamiento automática.
(05/07/2013) Aparato para transferir un recipiente de muestras desde un soporte de partida hasta un portarrecipientes , que comprende un bastidor de soporte de una pinza de agarre y una pinza de agarre de recipientes selectivamente móvil con respecto a dicho bastidor entre una posición superior y una posición inferior en la que los dedos de la pinza de agarre de recipientes son capaces de sujetar un recipiente en un soporte de partida o de dejar el recipiente en un portarrecipientes , en donde dicha pinza de agarre de recipientes está fijada a un carro móvil a lo largo de medios de guía verticales de dicho bastidor de soporte , y en donde si el fondo del recipiente hace contacto con la superficie polana apoyada…
ACCIONADOR DE UN BOTÓN DE UN EQUIPO Y BANCO DE PRUEBAS DOTADO DE TAL ACCIONADOR.
(15/10/2012) La presente invención se refiere a un accionador de un botón de mando de un equipo . Este accionador comprende un brazo alargado , llevando dicho brazo alargado una carcasa cilíndrica dotada de una pluralidad de pinzas móviles con relación a dicha carcasa , gobernando un primer medio de accionamiento la movilidad de dichas pinzas mediante un tornillo sin fin principal que discurre a lo largo de un eje de simetría (AX2) de dicha carcasa y gobernando un segundo medio de accionamiento un giro de dicha carcasa y de dichas pinzas alrededor de dicho eje de simetría (AX2).
SISTEMA DE POSICIONAMIENTO, MANIPULACIÓN Y DESMONTAJE DE ÚTILES PARA LA FABRICACIÓN DE PIEZAS AERONÁUTICAS.
(04/07/2012) Sistema de posicionamiento, manipulación y desmontaje de útiles para la fabricación de piezas aeronáuticas.
Tiene especial aplicación en la fabricación de los revestimientos de las alas de avión donde quedan situados larguerillos de fibra de carbono que se unen durante la polimerización en autoclave.
Los segmentos de útil utilizados están definidos por angulares que copian la geometría del larguerillo y el ala horizontal correspondiente de la sección en "T" del mismo. Los angulares incluyen superiormente una pareja de almenas para asido por parte de las pinzas de un cabezal vinculado a un robot tipo esférico de brazo articulado con seis ejes.
Los angulares son de material INVAR-36 e incluyen…
DISPOSICION DE SEGURIDAD EN UN DISPOSITIVO PARA HACER GIRAR PAQUETES.
(16/06/2004). Ver ilustración. Solicitante/s: TETRA LAVAL HOLDINGS & FINANCE S.A.. Inventor/es: LINDSTRIM, GERT.
Una disposición de seguridad que incluye un dispositivo para hacer girar paquetes, del tipo que hace girar paquetes seleccionados que son transportados en un trayecto de transportador , comprendiendo el dispositivo para hacer girar los paquetes un conjunto de pistón y cilindro con un vástago de pistón dispuesto para moverse paralelo al trayecto de transportador , un miembro de giro y un miembro de agarre , caracterizada porque la disposición de seguridad incluye, además, un anclaje dispuesto en el vástago de pistón del conjunto de pistón y cilindro, y una ménsula que está dispuesta para soportar el miembro de giro y el miembro de agarre , estando el anclaje y la ménsula unidos en forma cargada elásticamente de tal modo que se defina una cavidad , y porque un conducto de aire de entrada y un conducto de aire de salida están conectados a la cavidad , con una protección de presión dispuesta en el conducto de aire de salida.
PINZA PARA LA RECOGIDA Y LIBERACION DE CUERPOS LAMINARES Y UTILIZACION DE LA MISMA.
(01/05/2002). Ver ilustración. Solicitante/s: GRUPO GRIFOLS, S.A.. Inventor/es: MARTINELL GISPER-SAUCH, ENRIQUE, GESTI AMETLLER,DAVID, POMAR LONGEDO,PEDRO.
Pinza para la recogida y liberación de cuerpos laminares y utilización de la misma. La pinza comprende un cabezal desplazable según tres ejes coordenados portador de brazos basculantes dotados de uñas para la retención del elemento laminar, por su cara inferior, en zona próxima a sus bordes y poseyendo asimismo dicho cabezal móvil una serie de vástagos que reciben la acción de resortes antagonistas y que están destinados a establecer contacto sobre la cara superior del elemento laminar para permitir su sujeción firme entre las uñas de los brazos móviles de la pinza y los propios vástagos, poseyendo además dicho cabezal unos medios para el accionamiento de apertura de los brazos basculantes portadores de las uñas de sujeción y pares de pestañas laterales para el centraje de la placa con el cabezal en la operación de recogida de un elemento laminar.
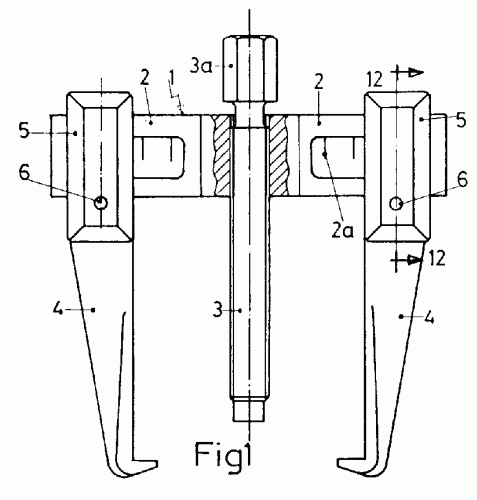
DISPOSITIVO DE EXTRACTOR MECANICO PERFECCIONADO.
(16/07/1994). Ver ilustración. Solicitante/s: SAMPEDRO MARTINEZ, JULIO.
DISPOSITIVO DE EXTRACTOR MECANICO PERFECCIONADO, PROVISTO DE BRAZOS RADIALES Y EN LOS QUE LAS GARRAS ACTIVAS, SE COMPONEN DE UN SOPORTE QUE SE PROLONGA DETERMINANDO UNA CAVIDAD CORREDERA (5B) DE SECCION TRANSVERSAL EN T ABIERTA INFERIORMENTE PARA RECIBIR UNA RECIPROCA CABEZA EN T (4A) PERTENECIENTE A UNA SEPARABLE PATA QUE DISPONE DE UN ALOJAMIENTO TRANSVERSAL (4B) PARA UN RESPECTIVO PASADOR DISPUESTO DESMONTABLEMENTE ENTRE LAS PAREDES ANTERIOR Y POSTERIOR DE DICHO SOPORTE DESLIZANTE.
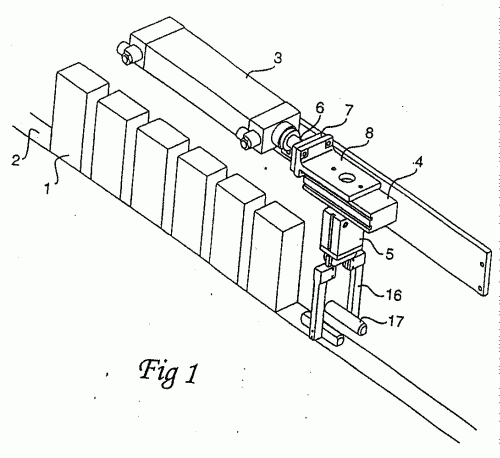
DISPOSITIVO PARA MANIPULAR COMPONENTES CON UN DISPOSITIVO DE PINZAS.
(01/07/1992). Ver ilustración. Solicitante/s: STIWA-FERTIGUNGSTECHNIK STICHT GESELLSCHAFT MBH. Inventor/es: HUBER, THOMAS, HUBER, RALF.
LA PRESENTE INVENCION DESCRIBE UN DISPOSITIVO PARA MANIPULAR COMPONENTES , CON UN DISPOSITIVO DE PINZAS APOYADO EN FORMA DESPLAZABLE A LO LARGO DE UNA VIA DE CONDUCCION POR MEDIO DE UN ACCIONAMIENTO DE AJUSTE . EL DISPOSITIVO DE PINZAS COMPRENDE DOS DEDOS DE PINZA GRADUABLES RELATIVAMENTE ENTRE SI Y UN ACCIONAMIENTO DE AJUSTE EN ESPECIAL MEDIANTE UN FLUIDO, ASI COMO UN DISPOSITIVO DE MEDICION . A UN DEDO DE PINZA LE CORRESPONDE UN ELEMENTO DE AJUSTE , EL CUAL ESTA UNIDOS AL DADO DE PINZA POR MEDIO DE UNA DISPOSICION DE COLISA . EL ELEMENTO DE AJUSTE ESTA ASENTADO EN FORMA DESPLAZABLE A LO LARGO DE UNA VIA DE CONDUCCION ALINEADA PERPENDICULARMENTE RESPECTO A LA VIA DE CONDUCCION DEL DEDO DE PINZA O BIEN POR MEDIO DE LAS COLUMNAS DE GUIA DEL DEDO DE PINZA Y ESTA UNIDO EN MOVIMIENTO CON EL ACCIONAMIENTO DE AJUSTE.
DISPOSITIVO PARA COGER PRODUCTOS PLANOS O CUERPOS MOLDEADOS FLEXIBLES Y/O POROSOS Y/O PEGAJOSOS.
(16/12/1989). Solicitante/s: BASF AKTIENGESELLSCHAFT. Inventor/es: GEHRIG, HEINZ, DR.
Dispositivo para coger productos planos o cuerpos moldeados exibles y/o porosos y/o pegajosos, con un dispositivo de agarre fijado en el extremo de un brazo móvil de un robot, que está constituido por al menos dos elementos de agarre opuestos entre sí en un plano, sobre una construcción de marco, y que llevan agujas, caracterizado porque las agujas dispuestas en los elementos de agarre se han configurado en forma de arco circular y las agujas de un elemento de agarre están dirigidas entre sí en la forma de una rosca de varios hilos y porque los elementos de agarre son rotativos, con lo cual las agujas son móviles en forma helicoidal penetrando en los productos planos o bien cuerpos moldeados y saliendo de éstos.
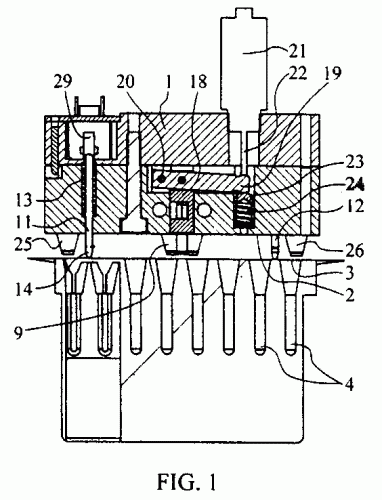
ELEMENTOS DE PRENSION PARA MAQUINAS DE USOS MULTIPLES.
(01/12/1989). Solicitante/s: INVESTIGACIO I DESENVOLUPAMENTS. Inventor/es: SAROBE ALEPUZ,JUAN.
ELEMENTOS DE PRENSION PARA MAQUINAS DE USOS MULTIPLES, PERTENECIENTES AL TIPO QUE TIENE UN MOVIMIENTO PARALELO DE APERTURA Y CIERRE, CARACTERIZADOS POR ESTAR COMPUESTOS POR UN CUERPO , QUE CON UNA TAPA Y UN EMBOLO FORMAN DOS CAMARAS PARA EL FLUIDO MOTRIZ (AIRE, ACEITE HIDRAULICO, ETC.); UN CONJUNTO DE MUELLES PARA GARANTIZAR LA SEGURIDAD EN LA PRENSION AUN EN CASO DE FALTA DE ALIMENTACION DEL FLUIDO MOTRIZ; DOS CORREDERAS (5, 5') CON SENDAS ACANALADURAS ACCIONADAS POR DOS LEVAS DISPUESTAS AL FINAL DEL EMBOLO DE FORMA QUE SE TRANSMITE MOVIMIENTO A DOS DEDOS (7, 7') QUE SE UTILIZAN PARA REALIZAR LA PRENSION; UNA PLURALIDAD DE ENTRADAS Y SALIDAS PARA EL FLUIDO MOTRIZ QUE ALIMENTA LAS CAMARAS (8, 8'); Y ELEMENTOS PARA DETECTAR LA POSICION DE LOS DEDOS (7, 7').
{kind=link}
{kind=link}
{kind=link}
{kind=link}