Mecanismo de sincronización para mordazas de pinza.
Un dispositivo para agarrar un objeto, que comprende:
un cuerpo principal (12) que tiene una primera y una segunda placa terminal (12A,
12B);
una placa base (26) que se extiende entre la primera placa terminal (12A) y la segunda placa terminal (12B); al menos un carril de guía (28A, 28B) que se extiende entre la primera placa terminal (12A) y la segunda placa terminal (12B);
una primera mordaza (14A) y una segunda mordaza (14B), que reciben cada una dicho al menos un carril de guía (28A, 28B), un primer conjunto de polea (16) y un segundo conjunto de polea (16'), unidos respectivamente a la placa base (26); y
un bucle de cadena (18) unido respectivamente al primer conjunto de polea (16) y al segundo conjunto de polea (16 '), incluyendo dicho bucle de cadena (18):
una primera longitud de cadena (32A) y una segunda longitud de cadena (32B),
y un primer eslabón (34A) y un segundo eslabón (34B) que unen la primera longitud de cadena (32A) y la segunda longitud de cadena (32B);
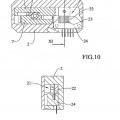
el dispositivo comprende además dos mecanismos tensores en extremos opuestos del dispositivo, incluyendo cada mecanismo tensor un tensor (44C) que crea tensión en el bucle de cadena (18) cuando se inserta a través de los agujeros apropiados en la placa terminal (12B) y en la placa base (26), y posteriormente se enrosca en un agujero (40) de cada conjunto de polea (16A);
en donde el primer conjunto de polea (16) y el segundo conjunto de polea (16') se unen de forma móvil de manera respectiva a la placa base (26),
de modo que se impide el movimiento normal al recorrido de la mordaza, y cada uno de dicho primer eslabón (34A) y de dicho segundo eslabón (34B) incluyen al menos un pasador de espiga (36), estando unido el bucle de cadena (18) a la primera mordaza (14A) y a la segunda mordaza (14B) mediante el al menos un pasador de espiga (36) de cada uno de dicho primer eslabón (34A) y de dicho segundo eslabón (34B).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E17153427.
Solicitante: PHD, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 9009 Clubridge Drive Fort Wayne, IN 46809 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WILLIAMS,MATTHEW R, SIPE,ANDREW J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › servocontroladas.
- B25J15/08 B25J 15/00 […] › teniendo elementos en forma de dedos (B25J 15/02, B25J 15/04 tienen prioridad).
PDF original: ES-2807950_T3.pdf
Patentes similares o relacionadas:
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Abrazadera con mecanismo multiplicador de fuerza, del 29 de Abril de 2020, de PHD, INC.: Una abrazadera accionada por fluido , , especialmente una abrazadera neumática accionada por fluido para sujetar una pieza de trabajo , comprendiendo […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Método para el manejo de pilas de sustratos flexibles, del 7 de Agosto de 2019, de Yaskawa Nordic AB: Método para manejar pilas de sustratos flexibles por medio de una pinza , la pinza que está dispuesta en un brazo de un robot y que tiene un dedo […]
Pinza de satélites, del 12 de Junio de 2019, de Przemyslowy Instytut Automatyki i Pomiarow PIAP: Una pinza para satélites que consta de una base a la que se acopla con bisagra, como mínimo, un dedo móvil , que consta, como mínimo, de dos falanges […]
Dispositivo de soporte y agarre, en particular para líneas de llenado y/o cierre de recipientes, del 15 de Mayo de 2019, de RONCHI MARIO S.P A.: Dispositivo para soportar y agarrar recipientes (1, 1a), que comprende: - una base que define una superficie superior para soportar un recipiente (1,1a); - […]
Pinzas, del 13 de Marzo de 2019, de Yaskawa Nordic AB: Unas pinzas adaptadas para usarse en un sistema automático para manipular sustratos flexibles proporcionados en una pila , pudiendo disponerse de forma rotatoria […]
 PINZA DE AGARRE DE RECIPIENTE CON UN SENSOR DE POSICIÓN, del 12 de Abril de 2011, de INPECO IP LTD: Una pinza de agarre de un recipiente o contenedor que comprende un bastidor principal y unos miembros de soporte movibles para los dedos de agarre que […]
PINZA DE AGARRE DE RECIPIENTE CON UN SENSOR DE POSICIÓN, del 12 de Abril de 2011, de INPECO IP LTD: Una pinza de agarre de un recipiente o contenedor que comprende un bastidor principal y unos miembros de soporte movibles para los dedos de agarre que […]