CIP-2021 : B25J 9/00 : Manipuladores de control programado.
CIP-2021 › B › B25 › B25J › B25J 9/00[m] › Manipuladores de control programado.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 9/02 · caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
B25J 9/04 · · por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
B25J 9/06 · caracterizados por brazos de articulaciones múltiples.
B25J 9/08 · caracterizado por elementos de construcción modulares.
B25J 9/10 · caracterizado por los medios para regular la posición de los elementos del manipulador.
B25J 9/12 · · eléctricos.
B25J 9/14 · · fluidos.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
B25J 9/18 · · eléctricos.
B25J 9/20 · · fluidos.
B25J 9/22 · · Sistemas de registro o sistemas de reproducción (en general G05B 19/42).
CIP2021: Invenciones publicadas en esta sección.
PINZA PARA MANIPULAR ELEMENTOS TUBULARES.
(27/07/2017) 1. Pinza para manipular elementos tubulares, caracterizada porque:
- comprende un primer módulo de sujeción configurado para sujetar un primer cuerpo tubular por su cara interna y un segundo módulo de sujeción configurado para sujetar un segundo cuerpo tubular por su cara interna;
- los dos módulos de sujeción comprenden unos primeros mandriles y unos segundos mandriles , respectivamente, que son equidistantes de una dirección axial central de una estructura soporte de la pinza ;
- unos primeros actuadores lineales y unos segundos actuadores lineales que están configurados para desplazar en direcciones radiales los primeros mandriles y los segundos mandriles ;
donde la pinza está configurada para sujetar simultáneamente el primer cuerpo tubular y el segundo cuerpo tubular en posiciones coaxiales…
Base para robot educativo.
(19/07/2017) 1. Base para robot educativo, caracterizado porque dicha base comprende:
- unos medios de apoyo que permiten que la base se desplace;
- unos medios de detección del entorno para evitar que la base choque o se caiga durante su desplazamiento;
- un medio de soporte para un Smartphone , donde el medio de soporte está configurado para hacer girar el Smartphone alrededor de un eje horizontal y alrededor de un eje vertical;
- un medio de procesamiento conectado a los medios de apoyo, los medios de detección del entorno, y el medio de soporte; y
- un medio de comunicación entre el medio de procesamiento y el Smartphone , de modo que el Smartphone puede comunicarse con…
Columna vertebral para un robot humanoide.
(05/07/2017) Columna vertebral para robot humanoide , comprendiendo la columna un pedestal inferior destinado a ser fijado a una pelvis del robot y un pedestal superior destinado a ser fijado a un cuello del robot , permitiendo la columna vertebral dos rotaciones del pedestal superior con respecto al pedestal inferior , efectuándose una primera de las rotaciones alrededor de un eje sagital y efectuándose una segunda de las rotaciones alrededor de un eje transversal de la columna , caracterizada porque comprende además una barra flexible y accionadores lineales , estando la barra encastrada en una primera de sus…
Instalación de revestimiento y procedimiento de funcionamiento correspondiente.
(17/05/2017) Instalación de revestimiento para el revestimiento de componentes, en particular para pintar componentes de aeroplano, con
a) una primera cabina de revestimiento , en particular para revestir unos componentes de aeroplano de grandes dimensiones,
b) un robot de revestimiento de varios ejes, que posiciona un aparato de revestimiento, en particular, un pulverizador rotativo,
c) una segunda cabina de revestimiento , en particular para revestir unos componentes de aeroplano de pequeñas dimensiones ,
d) un eje de desplazamiento para desplazar el robot de revestimiento a lo largo del eje de desplazamiento , discurriendo el eje de desplazamiento dentro de la primera cabina de revestimiento y extendiéndose en la segunda cabina de revestimiento , de manera que el robot de revestimiento …
Dispositivo de asistencia al movimiento.
(10/05/2017) Aparato, que comprende:
un sistema de exoesqueleto que comprende una pluralidad de sensores para generar señales que indican un movimiento actual y una disposición actual del sistema de exoesqueleto, un segmento de cadera, y por lo menos una extremidad inferior que comprende un segmento (108R, 108L) de muslo y un segmento (106R, 106L) de pierna para acoplarse a una superficie lateral de una pierna de un usuario, comprendiendo el segmento (108R, 108L) de muslo:
un receptáculo (109R, 109L),
una primera articulación alimentada (102R, 102L) dispuesta en el receptáculo (109R, 109L) y configurada para acoplar el segmento de muslo al segmento de…
SISTEMA MULTISENSOR PARA REHABILITACIÓN E INTERACCIÓN DE PERSONAS CON DISCAPACIDAD.
(13/04/2017) Sistema multisensor para rehabilitación e interacción de personas con discapacidad, tanto motora, como cognitiva. El sistema permite la realización de terapias utilizando distintos modos de interacción hombre-máquina, posibilitando múltiples modos de interacción para personas con distintas discapacidades y por tanto ofreciendo notables ventajas frente a otros medios existentes. El sistema es capaz de ajustarse a las necesidades de cada paciente a través de un proceso de entrenamiento;de esta forma,el sistema combina de forma eficiente los sensores disponibles y permite la definición de gestos propios para cada sensor y paciente. El sistema ofrece los siguientes modos de interacción: pose y gestos del cuerpo, voz, táctil, posición mirada, pose y gestos de la mano.El sistema multisensor se integra con una…
Cabezal con alambre de corte, combinado con un brazo robótico, para trabajar materiales de piedra.
(29/03/2017) Un cabezal con un alambre de corte o conformación apto para realizar trabajos complejos sobre bloques de mármol, granito, travertino, cemento u hormigón y materiales pétreos en general, destinados a obtener artículos moldeados, artísticos y arquitectónicos, que comprende un brazo de un manipulador o robot antropomorfo con varios grados de libertad y con un par de elementos en forma de placa (13, 13') que definen un armazón con ramificaciones opuestas conectadas a una ramificación de conexión central , dotada de una pluralidad de poleas (28, 28') a lo largo de las cuales se extiende dicho alambre de corte , caracterizado…
Instalación de mecanizado.
(22/03/2017) Instalación de mecanizado con al menos una estación de mecanizado con una separación de protección periférica para la protección de personas, al menos un aprovisionamiento y un dispositivo de alimentación para componentes , es decir, piezas de carrocería de automóviles, caracterizada por que el dispositivo de alimentación presenta uno o varios vehículos de distribución móviles entre el aprovisionamiento y la estación de mecanizado con al menos un manipulador de varios ejes y con uno o varios alojamientos para los soportes de componentes , teniendo el vehículo de distribución y/o el manipulador un dispositivo para superar la separación de protección de la estación de mecanizado , formando el manipulador el dispositivo y estando realizado y dispuesto desde el punto…
Transporte robotizado y sistema de transferencia.
(15/02/2017) Un sistema para transferir y transportar un envase flexible lleno que tiene una parte superior y una parte inferior, comprendiendo el sistema:
- una plataforma elevadora de asistencia configurada para recibir la parte inferior del envase flexible lleno en una primera posición y soportar una porción sustancial de un peso del envase flexible lleno desde la primera posición a una segunda posición, verticalmente separada de la primera posición, comprendiendo dicha plataforma elevadora de asistencia : un sistema de desplazamiento para desplazar y soportar el envase flexible lleno en posición vertical desde la primera posición a la segunda posición y un sistema de movimiento vertical para desplazar verticalmente…
(11/01/2017) Un guante de dedos para ser utilizado en el refuerzo de un movimiento de agarre ejecutado con un dedo o más de uno de una mano humana que lleva puesto el guante, en donde el guante comprende dedos de guante y una palma, caracterizado por que el guante comprende adicionalmente:
- para al menos un dedo (4a-4c) de guante, tendones (1a-1c) artificiales que se extienden a lo largo de la parte interna del guante y tiene en cada lado lateral de dicho dedo de guante un tendón (1a-1c) artificial tal que discurre a través de conductos (3a-3c) fijados a los lados laterales del dedo de guante,
- un estribo (6a-6c) fijado en la punta del mencionado al menos un dedo (4a-4c) de guante y diseñado para rodear la punta…
Sistema para manipular piezas en una línea de prensas.
(04/01/2017). Solicitante/s: ABB SCHWEIZ AG. Inventor/es: CASANELLES MOIX,RAMON, RUIZ GONZÁLEZ,JOSÉ.
Un sistema para manipular piezas en una línea de prensas, que comprende
- al menos dos robots industriales , cada uno con una muñeca y un brazo auxiliar conectado a la muñeca por primeros medios giratorios respectivos, y
- una unidad de control para el control conjunto de dichos robots,
comprendiendo el sistema además
- una barra transversal conectada en un extremo de la misma al brazo auxiliar de un robot, y en otro extremo de la misma al brazo auxiliar de otro robot, por segundos medios giratorios respectivos,
- comprendiendo la barra transversal al menos dos porciones de barra transversal (5a,5b), cada una unida al brazo auxiliar de un robot y cada una dispuesta para llevar medios de pinza para coger piezas, y
- estando unidas las porciones de barra transversal entre sí a través de una disposición de desplazamiento de manera que son desplazables una con respecto a otra en su dirección longitudinal.
PDF original: ES-2621498_T3.pdf
Dispositivo de procesamiento de alimentos de varios tipos y procedimiento.
(28/12/2016). Solicitante/s: WEBER MASCHINENBAU GMBH BREIDENBACH. Inventor/es: FROESE,OLAF, LOEWE,MARCO.
Dispositivo de procesamiento de alimentos, que presenta:
al menos dos dispositivos de corte de alimentos , que están diseñados para generar, respectivamente, porciones parciales,
respectivamente, una disposición de sensor , que está diseñada para establecer al menos una propiedad de las porciones parciales generadas por uno de los dispositivos de corte de alimentos y
una disposición de combinación , que está dispuesta aguas abajo de al menos los dispositivos de corte de alimentos respectivos, y que está diseñada para combinar las porciones parciales hasta dar una porción de varios tipos,
caracterizado porque
está previsto un dispositivo de control, que está diseñado para controlar, basándose en las propiedades de las porciones parciales respectivas, la operación de los dispositivos de corte de alimentos para ajustar uno a otro el peso de las porciones parciales, de modo que puede alcanzarse con gran precisión el peso objetivo de la porción de varios tipos.
PDF original: ES-2616507_T3.pdf
Ayuda tecnológica para amputados transfemorales.
(30/11/2016). Solicitante/s: SCUOLA SUPERIORE DI STUDI UNIVERSITARI E DI PERFEZIONAMENTO SANT'ANNA. Inventor/es: CARROZZA, MARIA, CHIARA, VITIELLO,NICOLA, LENZI,TOMMASO, DE ROSSI,STEFANO MARCO MARIA, GIOVACCHINI,FRANCESCO, CEMPINI,MARCO.
Un dispositivo de ayuda para personas con discapacidad motora, particularmente adecuado para permitir la marcha de los amputados transfemorales, que comprende:
- una prótesis para un miembro amputado; y
- una órtesis adecuada para ser utilizada en otra parte del cuerpo,
en el que dicha prótesis y dicha órtesis están operativamente conectadas entre sí,
y en el que dicho dispositivo de ayuda comprende además una unidad de control en comunicación con dicha prótesis y dicha órtesis ,
caracterizado por que dicho dispositivo de ayuda comprende además un sistema sensorial, estando dicho sistema sensorial en comunicación con dicha unidad de control.
PDF original: ES-2615887_T3.pdf
Dispositivo de mesa de posicionamiento paralelo redundante.
(12/10/2016). Solicitante/s: Huber Diffraktionstechnik GmbH & Co. KG. Inventor/es: OLEA,GHEORGHE DR.
Un dispositivo de mesa de posicionamiento paralelo redundante (Rd-PPT) que comprende:
una base estacionaria (B); una mesa amovible (T) que es capaz de moverse con respecto a la base estacionaria en los seis grados de libertad (6gdl),
en el que la mesa amovible tiene una superficie de fijación (ΣT) sobre la cual pueden montarse una muestra (Sp) o cuerpos relacionados (Bo) para investigaciones;
al menos un conjunto de cuatro patas de apoyo, siendo una redundante, como cadenas cinemáticas (K) 213, dispuestas simétricamente y en parejas alrededor del centro de la base conectadas con un extremo a la base estacionaria y con el otro extremo a la mesa amovible.
PDF original: ES-2669243_T3.pdf
Aparato para posicionamiento automatizado de sonda de ensayo de corrientes parásitas.
(10/08/2016) Un aparato para inspección y ensayos automatizados de una placa tubular en el que la placa tubular tiene una pluralidad de aberturas de tubo dispuestas sobre un plano de la placa tubular, comprendiendo el aparato:
un conjunto de núcleo que comprende:
una parte del cuerpo deslizante que contiene una cápsula de agarrador giratoria con tres agarradores de tubo;
un acoplamiento de cabezal de herramientas montado articuladamente a dicho conjunto de núcleo; y
accionadores de carcasa exterior; y caracterizado por:
una parte de carcasa con carcasas exteriores izquierda y derecha;
comprendiendo cada carcasa…
Miembro inferior de un exoesqueleto o de un robot bípedo.
(13/07/2016). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES. Inventor/es: GARREC, PHILIPPE.
Miembro inferior de exoesqueleto o de robot bípedo, que comprende un segmento de muslo , un segmento de pierna , y un pie , caracterizado por que el segmento de pierna comprende dos bielas (3a, 3b, 103a, 103b; 203a, 203b) que tienen extremos proximales que están articulados según ejes paralelos sobre el segmento de muslo, teniendo las dos bielas extremos distales articulados según ejes paralelos sobre el pie.
PDF original: ES-2634526_T3.pdf
MÉTODO DE DISEÑO E IMPLEMENTACIÓN DE SIMULADOR GRÁFICO PARA ROBOT INDUSTRIAL REDUNDANTE.
(07/07/2016). Solicitante/s: UNIVERSIDAD DE SANTIAGO DE CHILE. Inventor/es: URREA O.,Claudio, KERN MOLINA,John.
La presente invención describe un método de diseño e implementación de un simulador gráfico para robots Industriales redundantes de N Grados De Libertad (GDL) que contempla la utilización de herramientas de software, como por ejemplo: MatLab/Simulink, desarrollada por MathWorks, y MathType, desarrollada por Design Science, proporcionando los modelos cinemático y dinámico de robots industriales redundantes.
EXOESQUELETO PARA ASISTENCIA AL MOVIMIENTO HUMANO.
(27/06/2016). Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: GARCIA ARMADA,ELENA, CESTARI SOTO,Manuel Javier, SANZ MERODIO,Daniel, CARRILLO DE HIJES,Xavier.
Exoesqueleto para asistencia al movimiento humano.
La presente invención se refiere a un exoesqueleto para asistencia al movimiento humano ajustable al usuario en dimensiones, tensiones y rangos articulares, pudiendo ser este ajuste manual o automático, donde su colocación en el usuario puede ser en la dirección anterioposterior en el plano sagital, pudiendo colocarse desde tumbado o sentado sin necesidad de transferencia funcional, donde el exoesqueleto presenta un diseño modular, compatible con la biomecánica humana y que reproduce un movimiento natural y fisiológico en el usuario, con hasta 7 grados de movilidad actuados y controlados por extremidad, garantizando la estabilidad del equilibrio del usuario durante la locomoción.
PDF original: ES-2575255_A1.pdf
PDF original: ES-2575255_B1.pdf
EXOESQUELETO PARA ASISTENCIA AL MOVIMIENTO HUMANO.
(02/06/2016). Solicitante/s: MARSI BIONICS S.L. Inventor/es: GARCIA ARMADA,ELENA, CESTARI SOTO,Manuel Javier, SANZ MERODIO,Daniel, CARRILLO DE HIJES,Xavier.
La presente invención se refiere a un exoesqueleto para asistencia al movimiento humano ajustable al usuario en dimensiones, tensiones y rangos articulares, pudiendo ser este ajuste manual o automático, donde su colocación en el usuario puede ser en la dirección anterio- posterior en el plano sagital, pudiendo colocarse desde tumbado o sentado sin necesidad de transferencia funcional, donde el exoesqueleto presenta un diseño modular, compatible con la biomecánica humana y que reproduce un movimiento natural y fisiológico en el usuario, con hasta 7 grados de movilidad actuados y controlados por extremidad, garantizandola estabilidad del equilibrio del usuario durante la locomoción.
Sistema de ajuste para alinear elementos ópticos o muestras en vacío.
(31/03/2016) Sistema de ajuste para alinear elementos ópticos y muestras al vacío para proyectar radiación óptica o electromagnética, que consiste en
- al menos una cámara (3") de vacío,
- al menos un espejo (3') ajustable en la dirección espacial, y/o de
- al menos un elemento óptico ajustable en la dirección espacial, y/o de
- al menos una muestra ajustable en dirección espacial,
donde en el estado no desviado (estado inactivo) se proporcionan accionadores (X1, X2, Z1, Y, Z2, Z3) traslacionales para ajustar la alineación de al menos un espejo (3') ajustable en la dirección espacial y/o de al menos un elemento óptico ajustable en la dirección espacial o de al menos una muestra ajustable en la dirección espacial en un máximo de tres direcciones (X, Y, Z) espaciales esencialmente mutuamente perpendiculares,
…
EXOESQUELETO MECÁNICO AJUSTABLE, PARA UN ANIMAL BÍPEDO CON DISCAPACIDAD ÓSEA Y MUSCULAR.
(17/03/2016). Solicitante/s: UPROBOTS S. DE R.L. DE C.V. Inventor/es: VELAZQUEZ NIÑO,Noberto.
La invención describe un exoesqueleto mecánico ajustable, para un animal bípedo con discapacidad ósea y muscular, que se conforma de una estructura metálica, que sostiene soportes éxtensibles y reducible, rótula entre los soportes, motores eléctricos convencionales del tipo actuador lineal de 10 y 30 Kg, una plantilla se provee en la base horizontal , un soporte de espalda , un soporte de espalda baja , un sistema eléctrico conformado de, un microprocesador principal que acciona a través de un medio de comunicación a todos los componentes1 del sistema; sensores magnéticos de posición, angular y externa, los cuales se coloca en cada una de las rótulas y constan de un magneto , un sensor magnético y una base para el sensor magnético ; sensores de fuerza en las plantillas ; un acelerómetro (no ilustrado) en el respaldo de espalda ; y un control electrónico en tiempo real.
DISPOSITIVO DE MOTORIZACIÓN PARA ORTESIS ACTIVA.
(10/03/2016). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: CLOS COSTA,Daniel, FONT LLAGUNES,Josep María.
El dispositivo de accionamiento para ortesis activa comprende unos soportes proximal y distal previstos para ser fijados a unas partes proximal y distal de la ortesis, respectivamente. Los soportes proximal y distal están conectados entre sí por una articulación de soporte . En el soporte proximal están instalados un husillo conectado operativamente para ser girado por un motor eléctrico , una corredera movible a lo largo de unas guías lineales paralela al husillo , una tuerca fijada a la corredera y acoplada al husillo . Una biela tiene un primer extremo conectado a la corredera por una articulación proximal y un segundo extremo conectado al soporte distal por una articulación distal . La biela convierte el movimiento de la corredera en un giro del soporte distal alrededor de la articulación de soporte.
Dispositivo de motorización para órtesis activa.
(03/03/2016). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: CLOS COSTA,Daniel, FONT LLAGUNES,Josep María.
El dispositivo de accionamiento para órtesis activa comprende unos soportes proximal y distal previstos para ser fijados a unas partes proximal y distal de la órtesis, respectivamente. Los soportes proximal y distal están conectados entre sí por una articulación de soporte . En el soporte proximal están instalados un husillo conectado operativamente para ser girado por un motor eléctrico , una corredera movible a lo largo de unas guías lineales paralela al husillo , una tuerca fijada a la corredera y acoplada al husillo . Una biela tiene un primer extremo conectado a la corredera por una articulación proximal y un segundo extremo conectado al soporte distal por una articulación distal . La biela convierte el movimiento de la corredera en un giro del soporte distal alrededor de la articulación de soporte.
PDF original: ES-2562340_B1.pdf
PDF original: ES-2562340_A1.pdf
Sistema multisensor para rehabilitación e interacción de personas con discapacidad.
(01/03/2016) Sistema multisensor para rehabilitación e interacción de personas con discapacidad, tanto motora, como cognitiva. El sistema permite la realización de terapias utilizando distintos modos de interacción hombre-máquina, posibilitando múltiples modos de interacción para personas con distintas discapacidades y por tanto ofreciendo notables ventajas frente a otros medios existentes. El sistema es capaz de ajustarse a las necesidades de cada paciente a través de un proceso de entrenamiento; de esta forma, el sistema combina de forma eficiente los sensores disponibles y permite la definición de gestos propios para cada sensor y paciente. El sistema ofrece los siguientes modos de interacción: pose y gestos del cuerpo, voz, táctil, posición mirada, pose y gestos de la mano. El sistema multisensor se integra…
Dispositivo robótico modular y auto-adaptativo para la rehabilitación de la mano y procedimiento de uso.
(01/02/2016). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ DE ELCHE. Inventor/es: FERNANDEZ JOVER,EDUARDO, SABATER NAVARRO,JOSE MARIA, GARCIA ARACIL,Nicolas, BADESA CLEMENTE,Francisco J, MORALES VIDAL,Ricardo, DÍEZ POMARES,Jorge A, ENRIQUEZ URBANO,Samara Catalina.
Dispositivo robótico modular y auto-adaptativo para la rehabilitación de la mano y procedimiento de uso.
La presente invención consiste en un dispositivo robótico modular y auto-adaptativo para la rehabilitación de la mano, que está comprendido por: un dispositivo robótico de tipo exoesqueleto, un sistema de estimulación dorsal y palmar sincronizado con el movimiento asistido de apertura y cierre de la mano, un sistema de fijación y liberalización entre el dispositivo y la mano del usuario basado en el uso de sistemas de tipo clip magnetizados o similares, un sistema de adquisición de señales fisiológicas mediante sensores embebidos en el sistema de fijación del dispositivo, un sistema de control y un sistema de realidad virtual con diferentes actividades terapéuticas.
PDF original: ES-2558024_B1.pdf
PDF original: ES-2558024_A1.pdf
Plataforma móvil holonómica elástica en serie para la rehabilitación de las extremidades superiores.
(30/12/2015) Una plataforma móvil holonómica elástica en serie para la administración en el hogar de ejercicios de rehabilitación física terapéuticos de sobremesa para pacientes y la evaluación del rendimiento del paciente durante estos ejercicios, proporcionándose dicha plataforma móvil como una plataforma móvil de múltiples grados de libertad (DoF) que comprende un mecanismo compatible con múltiples DoF y una unidad de control en la que dicha plataforma móvil de múltiples DoF comprende al menos tres ruedas Mecanum accionadas y dicho mecanismo compatible con múltiples DoF se proporciona como una unidad de detección de fuerza en forma de un elemento elástico plano compatible con múltiples DoF en serie,
en la que dicho mecanismo compatible opera de tal manera que las fuerzas en el plano y la torsión que actúan se determinan…
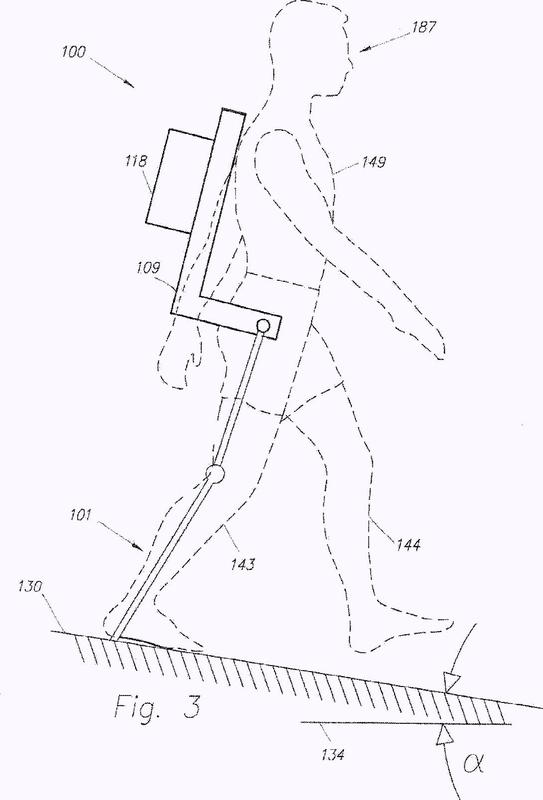
Dispositivo y método para disminuir el consumo de energía de una persona mediante el uso de un exoesqueleto de extremidad inferior.
(29/12/2015). Ver ilustración. Solicitante/s: Ekso Bionics, Inc. Inventor/es: KAZEROONI,HOMAYOON, AMUNDSON,KURT, HARDING,NATHAN.
Un sistema de exoesqueleto que comprende:
un tronco para acoplar a una persona;
los soportes de pierna para acoplar a las extremidades inferiores de la persona; y
una pluralidad de sensores diseñados para detectar las fuerzas sobre los soportes de las piernas que son indicativos de una posición;
caracterizado por:
las articulaciones motorizadas adaptadas para proporcionar un movimiento angular relativo entre los soportes de las piernas y el tronco ; y
un controlador para recibir las señales detectadas desde la pluralidad de sensores , indicando las citadas señales detectadas la posición, y controlando el citado controlador la actuación de por lo menos una de las articulaciones motorizadas para realizar una acción en base a la posición indicada.
PDF original: ES-2555119_T3.pdf
Dispositivo y procedimiento para el apilado de piezas apilables.
(14/12/2015) Dispositivo para el apilado de piezas apilables , en particular piezas prensadas, con una estación de transporte con al menos una vía transportadora mediante la cual se aproximan piezas individuales, y al menos un contenedor apilador en el que pueden apilarse las piezas , estando previsto para el traslado de las piezas un dispositivo de apilado entre la estación de transporte y el contenedor apilador que recoge las piezas de la vía transportadora de la estación de transporte y las apila en el contenedor apilador , presentando el dispositivo de apilado al menos un par de robots de apilado que comprende dos robots de apilado (23a, 23b) que trabajan independientemente uno del otro, recogiendo los robots de apilado…
Robot humanoide jugador, método y sistema de utilización de dicho robot.
(04/12/2015) Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros superiores, emita y reciba unos mensajes que pertenecen al grupo de los mensajes visuales, sonoros, gestuales y/o táctiles y produzca al menos un comportamiento autónomo, constituyendo dicho al menos un comportamiento un elemento de una secuencia de un juego generada como respuesta a al menos un mensaje que pertenece al grupo de los mensajes visuales, sonoros, gestuales y/o táctiles, dicho robot estando caracterizado porque dicho al menos un procesador está configurado para que el robot haga al menos una pregunta en forma de mensaje que pertenece al grupo de los mensajes visuales, sonoros, gestuales y/o…
Exoesqueleto robotizado con soporte de codo deslizante autoajustable para brazo humano.
(04/09/2015) Exoesqueleto robotizado con soporte de codo deslizante autoajustable para brazo humano.
La invención se refiere a un exoesqueleto robotizado que permite al usuario moverse cómodamente y realizar terapias médicas, fuerzas del tipo ortésico asistidas, actividades relacionadas con prácticas deportivas o entrenamientos especializados que requieran secuencias de movimientos, tareas cotidianas, o servicios de bomberos, policía, militares, etc. asistidos en fuerza por el exo-esqueleto.
El sistema está formado por un chaleco , al cual están adosados el exo-brazo , el exo-antebrazo , una estructura de soporte , con partes…
Aparato y método de regulación de giro para controlar un aparato giratorio.
(08/07/2015) Aparato de regulación de giro, que comprende:
un aparato giratorio que tiene una pluralidad de elementos conectados entre sí a través de una pluralidad de ejes de giro, permitiendo obtener el aparato giratorio un movimiento de giro relativo de uno de los elementos que gira alrededor de un eje de giro con respecto a otro de los elementos; y
unos medios de limitación de giro, caracterizado por el hecho de que
los medios de limitación de giro están dispuestos para limitar al menos uno de una pluralidad de movimientos de giro obtenidos mediante el aparato giratorio cuando una carga aplicada en el aparato giratorio supera un valor umbral predeterminado.
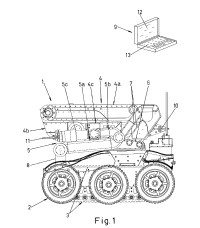
VEHÍCULO ROBOTIZADO TELECOMANDADO.
(28/05/2015). Ver ilustración. Solicitante/s: PROYTECSA SECURITY, S.L. Inventor/es: SALLEN ROSELLO,CESAR.
Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta para su desplazamiento respecto del eje longitudinal del vehículo, de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados sujeta y manipula los objetos a examen.
{kind=link}
{kind=link}