Transporte robotizado y sistema de transferencia.
Un sistema (100) para transferir y transportar un envase flexible (102) lleno que tiene una parte superior y una parte inferior,
comprendiendo el sistema:
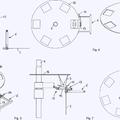
- una plataforma elevadora de asistencia (104) configurada para recibir la parte inferior del envase flexible (102) lleno en una primera posición y soportar una porción sustancial de un peso del envase flexible (102) lleno desde la primera posición a una segunda posición, verticalmente separada de la primera posición, comprendiendo dicha plataforma elevadora de asistencia (104): un sistema de desplazamiento para desplazar y soportar el envase flexible (102) lleno en posición vertical desde la primera posición a la segunda posición y un sistema de movimiento vertical para desplazar verticalmente el sistema de desplazamiento;
- un robot de múltiples ejes (101) que tiene una pinza (8) configurada para sujetar la parte superior del envase flexible (102) lleno en la primera posición y mantener la parte superior del envase flexible (102) lleno durante el desplazamiento y transferirlo a la segunda posición, estando colocada la plataforma elevadora de asistencia (104) dentro del alcance del robot de ejes múltiples (101); y
un controlador (3) conectado operativamente a la plataforma elevadora de asistencia (104) y al robot de múltiples ejes (101) y configurado para sincronizar el movimiento de la plataforma elevadora de asistencia (104) y el robot de múltiples ejes (101).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CA2010/001940.
Solicitante: Premier Tech Technologies Ltée.
Nacionalidad solicitante: Canadá.
Dirección: 1 Avenue Premier Riviere-du-Loup, QC G5R 6C1 CANADA.
Inventor/es: VIEL,ÉRIC, LÉVESQUE,VITAL, GIASSON,ÉTIENNE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
- B65B43/30 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › por zarpas que trabajan sobre las paredes opuestas, p. ej. por succión.
- B65B43/42 B65B 43/00 […] › Alimentación o posicionado de sacos, cajas o envases de cartón en posición dilatada, abierta o de pie; Alimentación de receptáculos preformados rígidos, p. ej. latas, cápsulas, tubos de vidrio, frascos, hacia la posición de empaquetado; Colocación de receptáculos o recipientes en el puesto de llenado (por medio de bocas de llenado B65B 39/00 ); Sujeción de los receptáculos o recipientes durante el llenado (por bocas de llenado B65B 39/00).
- B65B51/00 B65B […] › Dispositivos o procesos para soldar o fijar los pliegues o cierres de los paquetes, p. ej. sacos con el cuello cerrado por torsión.
PDF original: ES-2623871_T3.pdf
Patentes similares o relacionadas:
Aparato de apertura de bolsas y procedimiento de apertura de bolsas, del 17 de Junio de 2020, de TOYO JIDOKI CO., LTD.: Un aparato de apertura de bolsas que comprende una unidad de formación de espacios para doblar al menos una porción de pared frontal , […]
Un aparato de recogida de contenedores en una configuración aplanada y de apertura de los contenedores, del 23 de Octubre de 2019, de MARCHESINI GROUP S.P.A.: Un aparato de recogida de contenedores (A) en una configuración aplanada y de apertura de contenedores (A), que comprende: - un […]
Dispositivo de apertura de sacos para máquinas formadoras, llenadoras, selladoras, del 9 de Octubre de 2019, de PAYPER S.A.: Dispositivo de apertura de sacos para una máquina formadora, llenadora, selladora, que comprende dos módulos de acoplamiento para acoplarse a cada lado […]
Máquina de llenado para el llenado de un paquete de tipo bolsa flexible, del 18 de Septiembre de 2019, de ECOLEAN AB: Una máquina de llenado para llenar paquetes de tipo bolsa flexible, teniendo cada uno un canal de llenado y siendo esencialmente plano en un estado no llenado […]
Dispositivo y procedimiento para transportar y llenar sacos, del 14 de Agosto de 2019, de Statec Binder GmbH: Un dispositivo para transportar y llenar sacos , preferentemente sacos de boca abierta, que comprende un dispositivo de llenado giratorio alrededor […]
 Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Dispositivo de agarre para una máquina de envasado y llenado de bolsas, del 10 de Junio de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de agarre previsto en una máquina de envasado y llenado de bolsas en una variedad de cantidades y movido a lo largo de una trayectoria […]
MÉTODO PARA PREALIMENTAR PLANCHAS EN UN CARGADOR DE PLANCHAS DE UNA MÁQUINA FORMADORA DE CAJAS, PRE-ALIMENTADOR DE PLANCHAS, E INSTALACIÓN PARA LA FORMACIÓN DE CAJAS A PARTIR DE PLANCHAS, del 21 de Mayo de 2019, de TELESFORO GONZÁLEZ MAQUINARIA, SL: Método para pre-alimentar planchas en un cargador de planchas de una máquina formadora de cajas , pre-alimentador de planchas , e instalación para […]