CIP-2021 : G05B 19/416 : caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/416[3] › caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/416 · · · caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos.
(09/10/2019) Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de movimiento, y configurado para adquirir una posición de movimiento del eje de movimiento y un valor del par de perturbación aplicado al eje de movimiento cada período predeterminado, y para diagnosticar que se está produciendo un fallo cuando el valor del par de perturbación es mayor que un umbral de determinación de fallos, que comprende:
una unidad de diagnóstico de fallos configurada para restablecer el umbral de determinación de fallos, caracterizado por que comprende además:
una unidad de determinación de efectos de mantenimiento configurada para calcular un cambio en el valor del par de perturbación antes y después…
Procedimiento de ajuste del consumo de energía de dos herramientas durante el mecanizado de extremos de secciones de tubo.
(16/01/2019) Procedimiento de mecanizado de una sección de perfil largo que tiene una longitud real (L1) y un primer y un segundo extremo (3, 3'), donde el primer y el segundo extremo (3, 3') se mecanizan con un primer o un segundo cabezal de herramienta y, durante un tiempo de mecanizado, el material es eliminado continuamente por el primer y segundo cabezal de herramienta giratorio , caracterizado porque el tiempo de mecanizado (t) se divide en incrementos de tiempo (Δti), donde para cada incremento de tiempo (Δti) se mide un par de torsión (M (ti), M'(ti)) del cabezal de herramienta y donde por cada incremento…
Procedimiento y dispositivo para soldadura por láser remoto asistida por robot con un control simplificado de la dirección de focalización del haz de rayo láser.
(11/04/2018) Procedimiento de soldadura por láser de una estructura constituida por unos elementos de planchas de metal, en el cual: - un robot de manipulación de múltiples ejes está dispuesto incluyendo una pluralidad de motores eléctricos que controlan el movimiento de los elementos del robot alrededor de dichos ejes junto con una unidad de control electrónico programable para programar dichos motores eléctricos a fin de desplazar un elemento terminal del robot en cualquier posición, con cualquier orientación y en cualquier trayectoria en el interior de un volumen espacial determinado de tres dimensiones, - sobre dicho elemento terminal del robot de manipulación está montado un dispositivo accesorio para focalizar un haz de rayo láser que proviene de una fuente de láser, estando diseñado dicho dispositivo…
Método de mando y control del motor eléctrico de una unidad de automatización y sistema conectado.
(26/07/2017) Método para optimizar el mando y control de un motor eléctrico de una unidad de automatización , que comprende un elemento mecánico , accionado por un árbol de dicho motor eléctrico , para llevar a cabo un ciclo de operación y una unidad central de mando y control , comprendiendo la unidad de automatización al menos un medio de detección de la posición para detectar la posición instantánea de dicho árbol del motor eléctrico y/o de dicho elemento mecánico , en el que dicho motor eléctrico se conecta directamente a dicho elemento mecánico , constituyendo el motor eléctrico y el elemento mecánico una unidad de operación adecuada para realizar al menos una parte de una rotación completa de uno o más ángulos de…
Perforación con sensor de empuje adaptativo.
(12/07/2017) Un aparato para realizar una operación de perforación sobre un apilamiento de materiales, comprendiendo el aparato:
un alojamiento ;
un eje capaz de recibir una broca de perforación;
un motor de eje capaz de girar el eje a un conjunto de diferentes velocidades durante la operación de perforación;
un motor de empuje capaz de mover el eje en una dirección axial en un movimiento de vaivén y / o de alimentación;
un sensor de carga capaz de detectar una fuerza de empuje de reacción durante la operación de perforación para formar una fuerza de empuje de reacción detectada;
un controlador capaz de controlar el motor de eje y el motor de empuje para cambiar una velocidad de perforación en respuesta…
Método para mover una herramienta de una máquina de CNC sobre una superficie.
(31/05/2017). Solicitante/s: FIDIA S.P.A.. Inventor/es: MORFINO, GIUSEPPE.
Método para mover una herramienta de una máquina de CNC sobre una superficie en el que la máquina de CNC está dotada de una unidad de sensor , que comprende las etapas de:
(a) mover la herramienta sobre la superficie en una dirección predeterminada y/o a lo largo de una trayectoria predeterminada,
(b) tratar la superficie mediante la herramienta según un valor predeterminado de un parámetro de tratamiento,
(c) determinar, mediante la unidad de sensor , un valor de respuesta que indica una respuesta de la herramienta al tratamiento de la superficie,
(d) determinar una nueva dirección y/o una nueva trayectoria basándose en el valor de respuesta,
estando el método caracterizado porque,
la etapa (d) se basa en un modelo de la superficie que se deriva de una medición llevada a cabo mientras se mueve la herramienta sobre la superficie, y
el modelo se basa en datos de trayectoria de la herramienta.
PDF original: ES-2636015_T3.pdf
Procedimiento de control de un robot de taladrado y robot de taladrado que utiliza el procedimiento.
(28/12/2016) Procedimiento de control de un robot de taladrado, del tipo que comprende una estructura mecánica pilotada que permite colocar una herramienta de taladrado en una secuencia de taladrados programada en posición y orientación del taladrado de una pieza como una piel técnica,
comprendiendo el procedimiento las etapas siguientes:
una etapa de determinación de la aceleración (Ax, Ay, Az) de la herramienta de taladrado al final del acercamiento a una posición de taladrado, y a continuación de ensayo de una condición de estabilización (CL) de la herramienta de taladrado para establecer finalmente una autorización de taladrado ((c),…
Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente.
(26/02/2014) Estructura de regulador para más de dos unidades de accionamiento acopladas mecánicamente a unelemento móvil , en donde la estructura de regulador presenta un solo aparato de medición de posición paradeterminar una posición real (Xact) del elemento móvil y un regulador de posición para calcular una velocidadnominal (Vnom) válida para todas las unidades de accionamiento a partir de una posición nominal (Xnom) y laposición real (Xact), y en donde el aparato de medición de posición y el regulador de posición sirven paratodas las unidades de accionamiento de manera conjunta, en donde la unidad de accionamiento disponede un regulador de velocidad propio , caracterizada por que una unidad de accionamiento estáconfigurada como unidad maestra superior, y que las unidades de accionamiento subordinadas a esta unidadmaestra están configuradas…
MÉTODO PARA LA REDUCCIÓN DE LA VIBRACIÓN RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACIÓN O CONTROL TRANSITORIA, EN SISTEMAS VIBRATORIOS CON CUALQUIER VALOR DE AMORTIGUAMIENTO, MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL.
(01/02/2013) Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria, en sistemas vibratorios con cualquier valor de amortiguamiento, mediante el ajuste del contenido frecuencial de dicha señal.
La presente invención tiene por objetivo la reducción de vibraciones residuales provocadas por la excitación de una señal transitoria en sistemas genéricos vibratorios lineales con cualquier valor de amortiguamiento, y está especialmente indicada en sistemas con razones de amortiguamiento superiores a 0,3, complementando la patente P200700044. Esta señal puede corresponder, por ejemplo, a una ley de movimiento de una inercia.
El método consiste…
Procedimiento y sistema para satisfacer condiciones terminales en un sistema de control de movimiento.
(30/05/2012) Un procedimiento para satisfacer condiciones terminales de un plan de recorrido, utilizando el procedimiento ungenerador de recorrido, comprendiendo el procedimiento:
emitir instrucciones de control desde el generador de recorrido para un movimiento en un plan derecorrido;
caracterizado porque el procedimiento comprende, además:
calcular el tiempo restante para completar el movimiento en dicho plan de recorrido;
determinar si el tiempo restante es menor que la duración de un periodo de muestreo; y
calcular valores terminales al sustituir dicho tiempo restante por la duración del periodo demuestreo cuando el tiempo restante es menor que el periodo de muestreo, de forma que el controladorde tiempo discreto…
Mesa giratoria con una unidad de control o regulación asociada.
(04/04/2012) Mesa giratoria con una unidad de control o regulación asociada con un rodillo de impulsión , que se acciona de forma giratoria a través de un accionamiento por motor , en donde el rodillo de impulsión presenta una ranura de accionamiento en la que engranan pernos de retenida o pernos de rodillo , en donde la característica de movimiento como aceleración, frenado y demás movimientos giratorios de un tablero de mesa depende de la configuración de la ranura de accionamiento , y el tablero de mesa sirve para alojar piezas de trabajo a mecanizar, que mueve paso a paso y de forma controlada el tablero de mesa al alojamiento de mecanización o de piezas de trabajo, respectivamente a la posición de evacuación, caracterizada porque al rodillo de impulsión está asociado un elemento de accionamiento , que gira con el rodillo de impulsión…
PROCEDIMIENTO PARA LA REGULACIÓN ADAPTATIVA DEL AVANCE EN MÁQUINAS HERRAMIENTAS CONTROLADAS NUMÉRICAMENTE.
(15/03/2012) Procedimiento la para regulación adaptativa del avance en máquinas herramienta controladas numéricamente para la mecanización con arranque de virutas de una pieza de trabajo con una herramienta que rota en un huso según la especificación de un programa de CN , manteniéndose en lo posible constante una potencia (Preal) consumida por el huso mediante la influencia de un avance de trayectoria prefijada en el programa de CN para el movimiento entre la herramienta y la pieza de trabajo , caracterizado por que el procedimiento para la regulación adaptativa del avance se activa mediante una orden que inicia la mecanización de la pieza de trabajo del programa de CN para poner en marcha el huso y se desactiva mediante una orden del programa de CN que finaliza la mecanización de la pieza de trabajo para detener el huso , y…
DISPOSITIVO DE CONTROL Y MÉTODO DE CONTROL DE SERVOSISTEMA.
(12/07/2011) Un dispositivo de control de servosistema, incluyendo: una seccion de introduccion de datos que introduce datos necesarios a partir de los detalles de especificaciones de una maquina y motor; una seccion de edicion de datos que edita datos de excentrica electronica; una seccion de presentacion de datos a la que se envian los resultados editados convertidos a la forma de una tabla o grafico; y una seccion de conversion de datos de excentrica que puede convertir los resultados editados enviados a la seccion de conversion de datos de excentrica en una forma que permite movimientos de excentrica, caracterizado por incluir ademas: unos medios de calculo de datos introducidos para calcular al menos uno del par maximo de aceleracion/deceleracion,…
MÉTODO DE CONTROL DE TRAYECTORIA.
(27/05/2011) Método de control de trayectoria en al menos dos ejes lineales (X, Y, Z) y al menos un eje angular (A, B), en el que se prefija el movimiento de una herramienta frente a una pieza de trabajo mediante un programa de piezas para un Control Numérico , en el que la gestión de velocidad en el Control Numérico se efectúa separadamente para los ejes lineales (X, Y, Z) y los ejes angulares (A, B), caracterizado por que los perfiles de velocidad en los ejes angulares (A, B) se redondean más fuertemente que los perfiles de velocidad en los ejes lineales (X, Y, Z), corrigiéndose desviaciones que surgen de la gestión de velocidad separada del movimiento entre herramienta y pieza de trabajo mediante movimientos de compensación de los ejes lineales (X, Y, Z), de manera que para una desviación dada de los ejes angulares (A, B) de una gestión de velocidad…
METODO PARA LA REDUCCION DE LA VIBRACION RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACION O CONTROL TRANSITORIA MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL.
(26/04/2011) Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria mediante el ajuste del contenido frecuencial de dicha señal.La presente invención tiene por objetivo la reducción de vibraciones residuales provocadas por la excitación de una señal transitoria en sistemas genéricos vibratorios con comportamiento lineal. Esta señal puede corresponder, por ejemplo, a una ley de movimiento de una inercia, o a una entrada de fuerza excitadora del mismo.El método descrito consiste en la utilización de señales de excitación cuyo contenido frecuencial sea nulo en las frecuencias fi, y el ajuste de esta señal para que dichas frecuencias coincidan con las frecuencias propias del sistema vibratorio. Se consigue así anular esta vibración en…
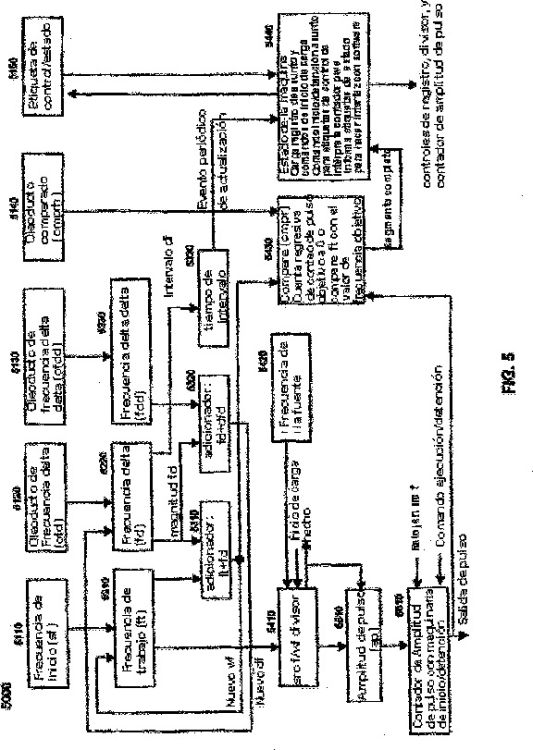
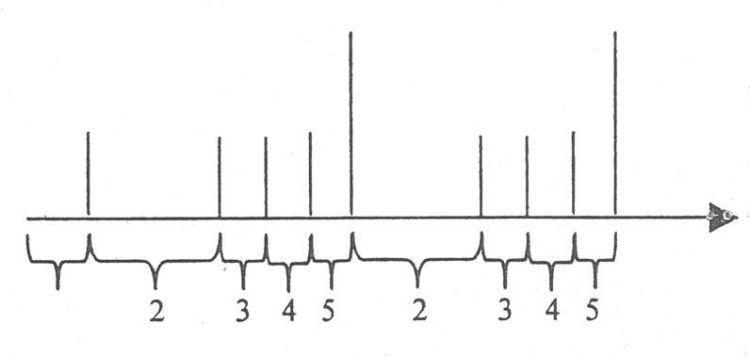
FUNCION DE SALIDA DE PULSO PARA CONTROLADOR LOGICO PROGRAMABLE CON CAMBIO DE FRECUENCIA LINEAL.
(27/11/2009). Ver ilustración. Solicitante/s: SIEMENS ENERGY & AUTOMATION, INC.. Inventor/es: MCNUTT, ALAN, D.
Un método para producir salidas de pulso de un controlador lógico programable, que comprende: cambiar automáticamente una primera frecuencia de pulso especificada de usuario a una segunda frecuencia de pulso; y sacar automáticamente una pluralidad de pulsos de un control lógico programable en frecuencias que varían entre la primera frecuencia de pulso especificada de usuario y la segunda frecuencia de pulso de acuerdo con la variación de tasa de tiempo lineal especificada por el usuario caracterizada porque la variación de tasa de tiempo lineal especificada por el usuario es recibida de un perfil de salida de frecuencia de pulso que comprende una pluralidad de segmentos de línea, por lo menos uno de los segmentos de línea tiene una longitud indefinida terminable por un evento externo predeterminado o alcanzar una meta de frecuencia predeterminada.
METODO PARA LA ORIENTACION DE UN HUSILLO.
(03/11/2009) Procedimiento para la orientación del husillo de un husillo controlado numéricamente y que gira rápidamente, con el que se leva el husillo desde un número de revoluciones de arranque (Ns) a una posición de reposo predeterminada, en el que el husillo se frena en una primera fase (P1) a un primer número de revoluciones límite (Ng1), y en una segunda fase (P2) bajo regulación de la posición se activa la posición de reposo definida, en el que se selecciona un segundo número de revoluciones límite (Ng2) por encima del primer número de revoluciones límite (Ng1) de tal manera que entre la consecución del segundo número de revoluciones límite (Ng2) y la consecución del primer número de revoluciones límite (Ng1) transcurre un periodo de tiempo (DELTAT), que permite una preparación del regulador de posición para una conmutación estable en la posición y/o en…
METODO DE CONTROL PARA MAQUINA CON CONTROL NUMERICO.
(16/03/2009). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR INVESTIG. CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, ROS TORRECILLAS,SALVADOR, RAMIREZ ROJAS,ADRIANA C, ALIQUE LOPEZ,JOSE RAMON.
Método de control para máquina con control numérico.#El método de control para máquina con control numérico contempla los siguientes pasos:#- Se miden y se registran las variables del proceso de mecanizado en al menos parte de la trayectoria de trabajo.#- Se calculan y se registran las propiedades del proceso de mecanizado en al menos parte de la trayectoria de trabajo.#- Se comparan las propiedades del proceso de mecanizado medidas con valores definidos previamente.#- Se continúa con la ejecución de la operación de mecanizado sin cambio alguno de los parámetros del proceso de mecanizado si las propiedades medidas se encuentran dentro de los límites establecidos por los valores definidos previamente.#- Se cambia automáticamente los parámetros del proceso de mecanizado, por tanto, se cambia automáticamente el programa si las propiedades medidas se encuentran fuera de los límites establecidos por los valores definidos, previamente.
PROCEDIMIENTO DE CONTROL DE TRAYECTORIA.
(16/05/2007). Solicitante/s: DR. JOHANNES HEIDENHAIN GMBH. Inventor/es: FAUSER, MATTHIAS, KALLENBORN, STEVE.
Procedimiento para un control continuo en el cual en el paso (A) de un control numérico se especifican por lo menos dos tolerancias globales, en el paso (B) de un control numérico se especifica una trayectoria de la herramienta con puntos de apoyo (Pn), en los cuales están situados, respectivamente, los vértices de la trayectoria de la herramienta que no sean diferenciables de forma continua, y donde en el paso (C), una unidad de asignación de tolerancias asigna a cada uno de los vértices en un punto de apoyo (Pn) una de las tolerancias establecidas en el paso (A).
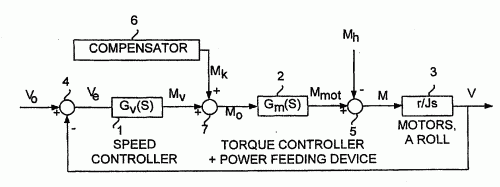
PROCEDIMIENTO Y DISPOSITIVO DE COMPENSACION EN FORMA ADAPTATIVA DE CAMBIOS DE CARGA.
(16/09/2006). Ver ilustración. Solicitante/s: ABB INDUSTRY OY. Inventor/es: RASIMUS, HEIKKI.
PROCEDIMIENTO Y DISPOSITIVO PARA COMPENSAR EL CAMBIO DE CARGAS DE FORMA QUE HAYA ADAPTACION, CONCRETAMENTE EN RELACION CON UN DISPOSITIVO MOTOR ELECTRICO QUE CONSTA DE UN MOTOR CUYO ARBOL ESTA CONECTADO A UNA CARGA QUE TIENE UN MOMENTO DE INERCIA CONOCIDO; UN DISPOSITIVO , COMO UN INVERSOR, PARA CONTROLAR EL MOTOR; UN CONTROLADOR DISPUESTO EN CONEXION CON EL DISPOSITIVO; Y UN CONTROLADOR DE LA VELOCIDAD DISPUESTO PARA REGULAR LA VELOCIDAD DEL MOTOR. EL PROCEDIMIENTO CONSISTE EN LOS PASOS DE DETERMINAR, DURANTE EL CAMBIO DE CARGA, UNA ESTIMACION (M H ) SOBRE UNA PERTURBACION DE PAR EXTERNA QUE CA USA CAMBIOS EN LA CARGA Y UTILIZAR ESTA ESTIMACION (M H ) DE PERTURBACION DE LA CARGA DETERMINADA DURANTE EL CAMBIO DE CARGA PREVIO PARA COMPENSAR LA PERTURBACION EXTERNA DEL PAR AL CONTROLAR EL PAR DEL MOTOR.
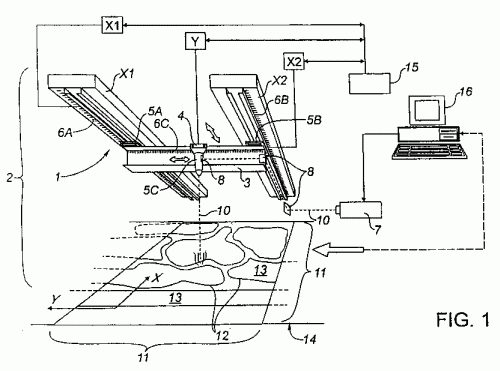
BOQUILLA DE LASER MONTADA EN PORTICO Y PROCEDIMIENTO PARA CONTROLAR EL POSICIONAMIENTO DEL LASER.
(01/07/2005). Ver ilustración. Solicitante/s: LACENT TECHNOLOGIES INC. Inventor/es: SAWATZKY, BRIAN, D., ANDREWS, RANDALL, G., WANT, CHRIS, J.
Procedimiento para reducir al mínimo el tiempo empleado para mover una herramienta a lo largo de una trayectoria continua de una pluralidad de movimientos geométricos discretos , en el que la herramienta presenta parámetros de movimiento que incluyen la velocidad (v) y la aceleración (a) y está limitada a una velocidad máxima (vmax) y una aceleración máxima (amax) de la herramienta, y en el que cada movimiento presenta un desplazamiento (L), comprendiendo el procedimiento las etapas siguientes: (a) establecer un tiempo mínimo de movimiento inicial (t-i) para mover la herramienta a través de cada desplazamiento de movimiento (L), dada la velocidad máxima (vmax) y la aceleración máxima (amax) de la herramienta; (b) establecer un rango de velocidades limitativo de un primer y un segundo perfil de velocidad (48a, 48b) para cada movimiento , que satisface el tiempo mínimo del movimiento (t-i) y no sobrepasa ni la velocidad máxima (Vmax) ni la aceleración máxima (amax) de la herramienta.
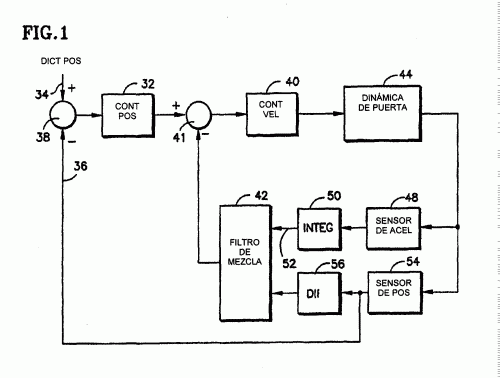
APARATO Y METODO DE CONTROL DE UN ACCIONADOR DE MOTOR LINEAL PARA PUERTA.
(01/05/2005). Ver ilustración. Solicitante/s: OTIS ELEVATOR COMPANY. Inventor/es: SKALSKI, CLEMENT A.
Un sistema de control para un operador de puerta para mover una puerta, incluyendo: medios de detección de posición a acoplar a una puerta móvil por un operador de puerta para detectar la posición de la puerta y generar una señal de posición; medios de detección de aceleración a acoplar a la puerta para detectar la aceleración de la puerta y generar una señal de aceleración; medios de integración para integrar la señal de aceleración para generar una primera señal de velocidad; medios diferenciadores para diferenciar la señal de posición para generar una segunda señal de velocidad; medios de filtro para mezclar la primera y la segunda señal de velocidad para generar una señal de velocidad filtrada; y medios de control para controlar la velocidad de la puerta en respuesta a la señal de velocidad filtrada y la posición de la puerta.
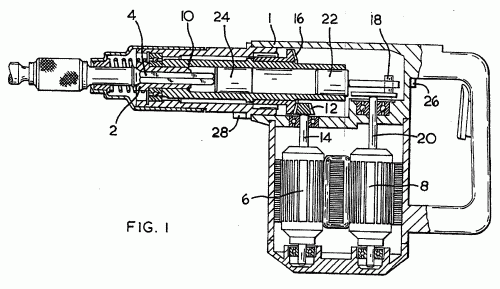
MARTILLO DE PERCUSION ROTATIVO.
(16/11/2004). Ver ilustración. Solicitante/s: BLACK & DECKER INC.. Inventor/es: PLIETSCH, REINHARD.
Martillo de percusión rotativo que comprende un mecanismo de percusión para golpear una punta de trabajo que se recibe en el martillo, y un mecanismo de accionamiento giratorio para hacer girar la punta de trabajo, siendo el mecanismo de percusión y el mecanismo giratorio variables de manera que la proporción del ritmo de impactos sobre la punta de trabajo con respecto a la velocidad de rotación pueda cambiarse, caracterizado porque el martillo incluye un sensor para detectar por lo menos una propiedad que influye en el funcionamiento del martillo, un procesador que determina un número de parámetros de funcionamiento a partir de la propiedad, y que determina a partir de los parámetros de operación la proporción deseada de la proporción del ritmo de impactos con respecto a la velocidad de rotación, y un medio para establecer el ritmo de impactos y la velocidad de rotación en respuesta al procesador.
METODO Y SISTEMA DE CONTROL ADAPTATIVO DE OPERACIONES DE TORNEADO.
(01/03/2004) Método de control adaptativo de una operación de torneado realizada sobre una pieza de trabajo mediante una herramienta de torneado accionada por ACN, controlando un parámetro de operación de entrada ajustable F del movimiento de la herramienta de torneado respecto a la pieza de trabajo, para mantener un parámetro de operación de salida AM sustancialmente en un valor predeterminado AMo y por lo tanto para compensar sustancialmente la variación de dicho parámetro de operación de salida AM producido por la variación de al menos una condición de operación B = B(t) que varía con el tiempo, comprendiendo el método las etapas de: (a) medir un valor actual AMc del parámetro de salida AM, (b) calcular aproximadamente la relación entre…
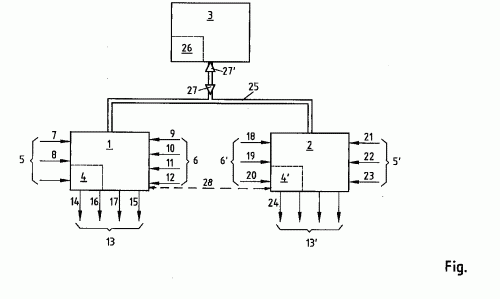
PROCEDIMIENTO Y PROGRAMA DE MANDO NUMERICO DE MAQUINA-HERRAMIENTA Y MANDO NUMERICO QUE FUNCIONA POR MEDIO DE ESTE PROGRAMA.
(01/12/2003) PROCEDIMIENTO Y PROGRAMA DE GENERACION DE TABLAS DE PASOS PARA CONTROL DIGITAL DE MAQUINA-HERRAMIENTA QUE COMPRENDE SUCESIVAMENTE: UNA ETAPA PRELIMINAR DE CREACION DE UN CATALOGO DE HERRAMIENTAS QUE PERMITE AL OPERADOR DEFINIR LAS HERRAMIENTAS (7,7') MONTADAS SOBRE LA MAQUINA-HERRAMIENTA. UNA ETAPA PRELIMINAR QUE PERMITE AL OPERADOR PARAMETRIZAR CIERTAS CARACTERISTICAS DE LA PIEZA A MECANIZAR, UNA ETAPA QUE PERMITE AL OPERADOR DEFINIR EN PRIMER LUGAR VARIOS CANALES O SISTEMAS DE EJES, Y A CONTINUACION INTRODUCIR UN PLANO DE OPERACIONES CONSTITUIDO POR UNA SUCESION DE OPERACIONES CONSECUTIVAS EN CADA…
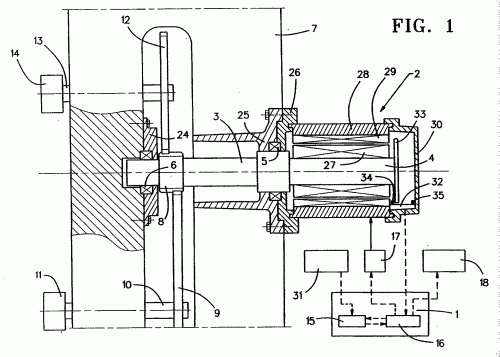
PROCEDIMIENTO Y SISTEMA DE ACCIONAMIENTO PARA EL ACCIONAMIENTO CONTROLADO MEDIANTE EL MOMENTO DE GIRO DE UNA MAQUINA.
(01/11/2003). Ver ilustración. Solicitante/s: PICANOL N.V.. Inventor/es: BILCKE, WALTER.
Procedimiento para el accionamiento de una máquina la cual contiene por lo menos una pieza constructiva que lleva a cabo un movimiento periódico, mediante control de un motor de accionamiento eléctrico, caracterizado porque se determinan y almacenan datos de control para el motor de accionamiento los cuales, para cada uno de un gran número de números de revoluciones del motor de accionamiento , corresponden a un gran número de momentos de giro predeterminados, diferentes, suministrables por el motor de accionamiento, medición del número de revoluciones real del motor de accionamiento y llamada de los datos de control almacenados, que para el número de revoluciones real medido corresponden a un momento de giro predeterminado que hay que suministrar.
PROCEDIMIENTO Y SISTEMA PARA LA DETERMINACION AUTOMATICA DE UN PROGRAMA DE MOVIMIENTO OPTIMO DE UN ROBOT.
(16/05/2003) Procedimiento para optimizar automáticamente el programa de movimiento de un robot que comprende por lo menos un miembro movible, unos medios de motor asociados a dicho miembro movible y unos medios de control capaces de activar dichos medios de motor según dicho programa de movimiento para mover dicho miembro movible a lo largo de una trayectoria en dependencia de un parámetro predeterminado del movimiento, caracterizado el procedimiento porque comprende las siguientes etapas: - adquisición de datos que indican tanto el estado de carga de dichos medios de motor como la precisión de movimiento del robot durante la ejecución de dicho programa de movimiento, - comparación de dichos datos sobre dicho estado de carga y sobre dicha precisión del movimiento con unos…
METODOS Y APARATO PARA EL RECTIFICADO DE ZONAS DE PIEZAS DE TRABAJO CILINDRICAS Y CONCENTRICAS.
(01/04/2003) Se describe un procedimiento para ajustar una máquina esmeriladora controlada por ordenador para esmerilar regiones concéntricas de una pieza de trabajo, en la cual se carga un programa que contiene datos relativos a la pieza de trabajo y un programa que contiene instrucciones para la rueda amoladora y se ejecuta el programa de instrucciones para la rueda amoladora de forma que se esmerile al menos una región de dicha pieza de trabajo hasta su forma final. La región se mide y se toma nota de la magnitud y de la posición angular de cualquier excentricidad indeseada introducida por el proceso de esmerilado y las instrucciones del programa o las señales de control derivadas del mismo se ajustan de forma que durante la esmerilación posterior de dicha región, o de una región similar de una pieza de trabajo similar,…
PRENSA DE TRANSFERENCIA HIDRAULICA.
(16/06/2002). Ver ilustración. Solicitante/s: MULLER WEINGARTEN AG. Inventor/es: WAGNER, WILHELM, ILG, ECKHARD.
SE PROPONE UNA PRENSA DE TRANSFERENCIA HIDRAULICA CON UN CONTROL DE TRANSFERENCIA Y UN CONTROL DE PRENSA INDEPENDIENTES ENTRE SI, REALIZANDOSE UNA COORDINACION ENTRE EL ORDENADOR DE PRENSA Y EL ORDENADOR DE TRANSFERENCIA, MEDIANTE UNA "ONDA DIRECTRIZ VIRTUAL" CONSTRUIDA COMO GENERADOR DE PULSOS.
DISPOSITIVO PARA MECANIZAR UNA PIEZA, ASI COMO LOS METODOS UTILIZABLES CON DICHO DISPOSITIVO.
(16/06/2002) UN APARATO PARA MECANIZAR UNA PIEZA DE TRABAJO COMPRENDE ELEMENTOS DE ACCIONAMIENTO PARA GIRAR UN CARRO ALREDEDOR DE UN EJE DE ROTACION Y UNA HERRAMIENTA PARA MECANIZAR LA PIEZA DE TRABAJO. EL APARATO INCLUYE ADEMAS UN DISPOSITIVO PARA MOVER LA HERRAMIENTA EN LAS DIRECCIONES X E Y RESPECTO A DICHO DISPOSITIVO Y UNA UNIDAD DE CONTROL QUE INCLUYE UNA MEMORIA PARA UNO O VARIOS PROGRAMAS DE CONTROL. LA UNIDAD DE CONTROL ESTA DISPUESTA PARA CONTROLAR EL DISPOSITIVO DE MOVIMIENTO DE ACUERDO CON UN PROGRAMA DE CONTROL, DE MANERA QUE LA HERRAMIENTA SIGA UNA O VARIAS TRAYECTORIAS PARA MECANIZAR LA PIEZA DE TRABAJO DE LA FORMA DESEADA. LA UNIDAD DE CONTROL…
METODOS Y APARATOS PARA LA RECTIFICACION DE REGIONES CILINDRICAS DE PIEZAS DE TRABAJO CONCENTRICAS.
(01/04/2002) SE DESCRIBE UN PROCEDIMIENTO PARA AJUSTAR UNA RECTIFICADORA CONTROLADA POR ORDENADOR PARA RECTIFICAR CILINDRICAMENTE ZONAS CONCENTRICAS DE LA PIEZA, EN EL QUE SE CARGAN UN PROGRAMA QUE CONTIENE DATOS SOBRE LA PIEZA Y OTRO PROGRAMA QUE CONTIENE INSTRUCCIONES EN CUANTO AL AVANCE DE LA MUELA, EJECUTANDOSE EL PROGRAMA DE INSTRUCCIONES DE AVANCE DE LA MUELA A FIN DE RECTIFICAR AL MENOS UNA DE DICHAS ZONAS DE LA PIEZA HASTA SU FORMA FINAL. LA ZONA SE CALIBRA, Y SE ANOTA LA MAGNITUD Y POSICION ANGULAR DE CUALQUIER EXCENTRICIDAD INDESEADA INTRODUCIDA POR EL PROCESO DE RECTIFICADO, AJUSTANDOSE LAS INSTRUCCIONES DEL PROGRAMA DE AVANCE DE LA MUELA O LAS SEÑALES DE CONTROL DERIVADAS DE LAS MISMAS DE MANERA QUE, DURANTE EL RECTIFICADO POSTERIOR DE DICHA ZONA (O DE UNA…
PROCEDIMIENTO Y APARATO PARA RECTIFICAR CON MUELA ABRASIVA PIEZAS DE TRABAJO CILINDRICAS.
(01/11/2001). Solicitante/s: UNOVA U.K. LIMITED. Inventor/es: LAYCOCK, MICHAEL, PICKLES, JOHN.
SE PRESENTAN UNA MAQUINA Y UN METODO DE AMOLADO PARA AMOLAR PIEZAS DE TRABAJO CILINDRICAS COMO, POR EJEMPLO, ESPIGAS DE MANIVELA DE UN ARBOL DE MANIVELA. EL MECANISMO DE AMOLADO ESTA CONTROLADO POR UN ORDENADOR E INCLUYE UN CALIBRE PARA CALIBRAR EL TAMAÑO DE LA ESPIGA DE MANIVELA DURANTE EL AMOLADO. EL ORDENADOR ESTA PROGRAMADO PARA DETENER LA RECTIFICACION, INICIAR LA FUENTE DE ALIMENTACION Y APAGARLA DESPUES DE QUE SE HAYA ALCANZADO UNA PRIMERA DIMENSION SELECCIONADA. DESPUES SE CALCULA UN VALOR MEDIO DEL TAMAÑO DE LA PIEZA DE TRABAJO A PARTIR DE LAS SEÑALES DEL CALIBRADOR, Y ESTAS SEÑALES DE ALIMENTACION PARA CONTROLAR EL MOVIMIENTO DE LA RUEDA DE AMOLADO PARA ALCANZAR EL TAMAÑO FINAL DESEADO SON CALCULADAS A PARTIR DEL TAMAÑO MEDIO CALCULADO. EL AMOLADO FINAL SE LLEVA A CABO SIN CALIBRACION, Y CUANDO SE HA PRODUCIDO EL AMOLADO EN TAMAÑO, SE INSTIGA A UNA FUENTE DE ALIMENTACION A QUE ALCANCE EL APAGADO FINAL, ANTES DE QUE SE RETRAIGA LA RUEDA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}