Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente.
Estructura de regulador para más de dos unidades de accionamiento (10) acopladas mecánicamente a unelemento móvil (1),
en donde la estructura de regulador presenta un solo aparato de medición de posición (2) paradeterminar una posición real (Xact) del elemento móvil (1) y un regulador de posición (5) para calcular una velocidadnominal (Vnom) válida para todas las unidades de accionamiento (10) a partir de una posición nominal (Xnom) y laposición real (Xact), y en donde el aparato de medición de posición (2) y el regulador de posición (5) sirven paratodas las unidades de accionamiento (10) de manera conjunta, en donde la unidad de accionamiento (10) disponede un regulador de velocidad propio (6), caracterizada por que una unidad de accionamiento (10.1) estáconfigurada como unidad maestra superior, y que las unidades de accionamiento subordinadas a esta unidadmaestra (10.2) están configuradas como unidades dependientes y presentan un regulador MMS (8) que en cadacaso presenta un valor de corrección de velocidad (Vcm, Vcs) para la unidad maestra (10.1) y la unidad dependiente(10.2).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/063731.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DR. JOHANNES-HEIDENHAIN-STRASSE 5 83301 TRAUNREUT ALEMANIA.
Inventor/es: MAIER, STEFAN, KOHLER,FRIEDER, SCHÖNHUBER,JOSEF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q5/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 5/00 Mecanismos de propulsión o de avance; Disposición de los mecanismos de control a este efecto (control automático B23Q 15/00; copiado B23Q 33/00, B23Q 35/00; especialmente adaptados a las máquinas de escariar o de taladrar B23B 39/10, B23B 47/02). › propulsados principalmente por medios eléctricos.
- G05B19/416 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
- H02P5/50 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 5/00 Disposiciones especialmente adaptadas para la regulación o el control de la velocidad o del par de dos o más motores eléctricos (H02P 6/04, H02P 8/40 tienen prioridad). › por comparación de los valores eléctricos que representan las velocidades.
PDF original: ES-2450756_T3.pdf
Fragmento de la descripción:
Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente La invención se refiere a una estructura de regulador para varias unidades de accionamiento acopladas mecánicamente. Tales disposiciones se presentan, por ejemplo, cuando se debe mover una mesa de maquinaria pesada con varios accionamientos en una dirección. Estas unidades de accionamiento deben ser controladas entonces de manera que la carga se distribuya de manera uniforme en todas las unidades de accionamiento, sin la producción de tensiones inadmisibles entre los accionamientos.
Por el documento DE 4409823 C1 se conoce un conjunto de varios accionamientos que se controla de manera central. Para cada accionamiento se usa aquí un aparato de medición de posición propio y un regulador de posición propio.
Por el documento EP 0 704 962 B1 se conoce una estructura de regulador con la que se puede operar una pluralidad de accionamientos de manera sincronizada. La estructura de regulador que se propone aquí usa en cada caso un regulador de posición y de número de revoluciones en común para todas las unidades de accionamiento. Esta estructura de regulador tiene la desventaja de que las alteraciones no simétricas relativas al momento de rotación pueden regularse solamente de manera simétrica, puesto que existe un solo regulador del número de revoluciones.
Por el documento DE 19527199 C2, para sincronizar rodillos de presión se conoce la forma de operar varios accionamientos con un solo aparato de posición, en donde cada eje de accionamiento dispone de un propio regulador de velocidad.
La invención tiene como objetivo proveer una estructura de regulación para varias unidades de accionamiento acopladas mecánicamente que puedan ser configuradas lo más flexible que sea posible y que puedan adaptarse así fácilmente a diferentes aplicaciones. Para este propósito es de ventaja un concepto modular en el que es posible interconectar unidades de accionamiento individuales y sus estructuras reguladoras asignadas directamente de manera sencilla formando un conjunto de accionamiento.
Este objetivo se logra a través de un dispositivo con las características de la reivindicación 1. Se obtienen formas de realización ventajosas a partir de las características enumeradas en las reivindicaciones dependientes de la reivindicación 1.
Se provee una estructura de regulador para más de dos unidades de accionamiento acopladas mecánicamente a un elemento móvil y un regulador de posición para calcular una velocidad nominal a partir de una posición nominal y la posición real, en donde el aparato de medición de posición y el regulador de posición sirven para todas las unidades de accionamiento de manera conjunta. Sin embargo, cada unidad de accionamiento dispone de un regulador de velocidad propio.
La estructura de regulador de acuerdo con la invención es apropiada para aplicaciones en las que están previstas más de dos unidades de accionamiento para el avance de un elemento móvil en una dirección. En otras palabras, a este respecto se trata de máquinas en las que se acciona un eje móvil de más de dos accionamientos al mismo 45 tiempo.
A este respecto, la posición actual del elemento móvil es detectada por un solo aparato de medición de posición y se presenta como posición real a la estructura reguladora que compara esta última con la posición nominal y en caso de desviaciones a través de un control apropiado de todas las unidades de accionamiento regula la posición real a la 50 posición nominal.
La estructura reguladora para este propósito presenta un regulador de posición en común para todas las unidades de accionamiento que a partir de la desviación entre la posición real y la posición nominal determina una velocidad nominal que se predetermina para los accionamientos individuales.
Cada unidad de accionamiento dispone de un regulador de velocidad propio que recibe la velocidad nominal del regulador de posición en común y la velocidad real y determina a partir de ellas una corriente nominal. Esta corriente nominal se convierte en un regulador de corriente en señales de control para el motor propiamente dicho.
Otras ventajas y detalles de la presente invención se harán evidentes a partir de la siguiente descripción de diferentes formas de realización haciendo referencia a las figuras. A este respecto:
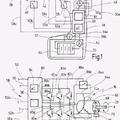
La figura 1 muestra una estructura de regulador para tres unidades de accionamiento acopladas mecánicamente, 65
La figura 2 muestra una estructura de regulador para cuatro unidades de accionamiento acopladas mecánicamente,
La figura 3 muestra un detalle de las estructuras de regulador para varias unidades de accionamiento acopladas 5 mecánicamente.
En la figura 1 se representa un elemento móvil 1 o, más exactamente, una mesa 1, que se puede mover mediante un eje lineal en una dirección X. Para este propósito se acciona la mesa 1 mediante dos husillos 3 que están dispuestos de manera paralela a la dirección X. Uno de los dos husillos 3 es impulsado por dos motores 2.1 y 2.2, el otro husillo es impulsado por un solo motor 2.3. Estos motores son componentes de las unidades de accionamiento 10.1, 10.2 y 10.3. Tal configuración puede ser conveniente cuando la masa a ser movida está dispuesta de manera no uniforme.
Puesto que estas unidades de accionamiento están estructuradas de manera muy similar y contienen, por ejemplo,
cada una, un regulador de velocidad 6, un regulador de corriente 7 y un motor 2, a continuación se usarán los números de referencia con el índice sucesivo solamente cuando se refiere a un componente de una unidad de accionamiento especial, es decir, por ejemplo, para el motor 2.2 la unidad de accionamiento 10.2. Por lo demás, se usan los números de referencia sin índice, es decir, por ejemplo, para los motores 2 de las unidades de accionamiento 10.
Un solo aparato de medición de posición 4 detecta la posición actual de la mesa 1, cuyo valor de posición se toma como posición real Xact para la regulación en todas las unidades de accionamiento 10. Para este propósito se sustrae la posición real Xact de una posición nominal Xnom y se suministra a un regulador de posición 5 que a partir de esta última genera de manera conocida una velocidad nominal Vnom válida para todas las unidades de accionamiento 10.
La velocidad nominal Vnom se suministra ahora a cada una de las unidades de accionamiento 10 y desde allí se suministra a un regulador de velocidad 6 presente en cada unidad de accionamiento 10. De la velocidad nominal Vnom se sustrae previamente la velocidad real actual Vact que se puede generar, por ejemplo, a través de la derivación de la posición real. Esta formación de diferencia es convencional en la técnica y no se representa en las figuras, a fin de poder mostrar mejor los detalles de la invención. El regulador de velocidad 6 también puede ser designado como regulador del número de revoluciones, puesto que el número de revoluciones de los motores 2 por la realización mecánica está relacionado con la velocidad de la mesa 1.
Cada regulador del número de revoluciones 6 genera de manera conocida una corriente nominal Inom que se suministra de manera convencional a un regulador de corriente 7 presente en cada unidad de accionamiento 10. Una vez más, la formación de la diferencia de manera convencional con una corriente real no se muestra aquí de forma más detallada. Los reguladores de corriente 7 generan valores nominales para las tensiones de las fases de los motores individuales, a fin impulsar a los motores 2 de tal manera que la mesa 1 se mueve finalmente en su posición nominal predeterminada desde afuera Xnom.
A fin de asegurar ahora que la mesa 1 se acciona de manera uniforme y que no se atasca, la unidad de accionamiento 10.1 está configurada como unidad maestra, mientras que las unidades de accionamiento 10.2 y 10.3 están configuradas como unidades dependientes de esta unidad maestra 10.1.
Esto significa que las unidades de accionamiento 10.2 y 10.3, en cada caso, por medio de un momento de unidad maestra a unidad dependiente presentan reguladores 8, denominados de aquí en adelante de manera abreviada como reguladores MMS 8 (por las siglas en alemán de Momenten-Master-Slave Regler 8 (reguladores de momento de unidad maestra a unidad dependiente 8) ) . Por lo tanto, los reguladores MMS 8 están asignados a las unidades dependientes, de modo que la unidad maestra (es decir, la unidad de accionamiento 10.1) no presenta un regulador MMS 8.
La estructura exacta de un regulador MMS 8 se describirá de manera más detallada más adelante haciendo referencia a la figura 3. Aquí se describirá primero solamente la forma de funcionamiento... [Seguir leyendo]
Reivindicaciones:
1. Estructura de regulador para más de dos unidades de accionamiento (10) acopladas mecánicamente a un elemento móvil (1) , en donde la estructura de regulador presenta un solo aparato de medición de posición (2) para 5 determinar una posición real (Xact) del elemento móvil (1) y un regulador de posición (5) para calcular una velocidad nominal (Vnom) válida para todas las unidades de accionamiento (10) a partir de una posición nominal (Xnom) y la posición real (Xact) , y en donde el aparato de medición de posición (2) y el regulador de posición (5) sirven para todas las unidades de accionamiento (10) de manera conjunta, en donde la unidad de accionamiento (10) dispone de un regulador de velocidad propio (6) , caracterizada por que una unidad de accionamiento (10.1) está
configurada como unidad maestra superior, y que las unidades de accionamiento subordinadas a esta unidad maestra (10.2) están configuradas como unidades dependientes y presentan un regulador MMS (8) que en cada caso presenta un valor de corrección de velocidad (Vcm, Vcs) para la unidad maestra (10.1) y la unidad dependiente (10.2) .
(10.1) y la unidad dependiente (10.2) .
4. Estructura de regulador de acuerdo con una de las reivindicaciones 1 a 3, caracterizada por que los valores de 25 corrección de velocidad (Vcm, Vcs) presentan diferentes signos.
5. Estructura de regulador de acuerdo con una de las reivindicaciones 1 a 4, caracterizada por que los valores de corrección de velocidad (Vcm, Vcs) presentan diferentes cantidades, a fin de dividir asimétricamente una corrección necesaria de la velocidad entre la unidad maestra (10.1) y la unidad dependiente (10.2) .
6. Estructura de regulador de acuerdo con una de las reivindicaciones anteriores, caracterizada por que por lo menos una de las unidades de accionamiento (10.4) actúa tanto como unidad maestra de por lo menos una unidad de accionamiento adicional (10.3) como también como unidad dependiente de una unidad maestra superior (10.1) .
7. Unidad de regulador de acuerdo con la reivindicación 6, caracterizada por que esta unidad de accionamiento (10.4) que sirve al mismo tiempo como unidad maestra y unidad dependiente presenta un regulador MMS (8.4) para la compensación con la unidad maestra superior (10.1) .
8. Estructura de regulador de acuerdo con una de las reivindicaciones anteriores, caracterizada por que excepto la unidad maestra superior (10.1) cada unidad de accionamiento (10.2, 10.3, 10.4) presenta un regulador MMS (8.2, 8.3, 8.4) .
Patentes similares o relacionadas:
Disposición de máquina herramienta y procedimiento para operar una disposición de máquina herramienta, del 27 de Mayo de 2020, de GEISS AKTIENGESELLSCHAFT: Disposición de máquina herramienta , que tiene un dispositivo de mecanizado ultrasónico y una máquina herramienta , caracterizada porque […]
 Herramienta manual, del 5 de Octubre de 2018, de C. & E. FEIN GMBH: Una herramienta manual que comprende un motor de accionamiento acoplado a un accionamiento , un dispositivo de suministro de energia […]
Herramienta manual, del 5 de Octubre de 2018, de C. & E. FEIN GMBH: Una herramienta manual que comprende un motor de accionamiento acoplado a un accionamiento , un dispositivo de suministro de energia […]
Aparato de maquinado con sistema de accionamiento de huso y método de maquinado de un miembro mediante el uso de dicho aparato, del 7 de Junio de 2017, de National Oilwell Varco, L.P: Un aparato de maquinado para maquinar el interior de un miembro (T) montado con respecto al suelo , el aparato comprende: un sistema de huso que puede posicionarse […]
Disposición de una mesa giratoria de máquinas herramientas grandes, especialmente fresadoras mandrinadoras, del 2 de Abril de 2013, de PELUG - TECH s.r.o: Una disposición de una mesa giratoria de grandes máquinas herramientas, en particular fresadora mandrinadora, formada por un motor de par y por un […]
Unidad fresadora giratoria para máquina-herramientas y sistemas de mecanizado y procedimiento para el funcionamiento de una unidad fresadora giratoria de este tipo, del 25 de Febrero de 2013, de NILES-SIMMONS INDUSTRIEANLAGEN GMBH: Unidad fresadora giratoria para máquina-herramientas y sistemas de mecanizado, caracterizada porque de manera concéntrica al eje de giro […]
DISPOSITIVO DE CABEZAL PARA MAQUINAS HERRAMIENTAS AUTOMATICAS CON ROTACION DE UN SEGUNDO EJE INCLINADO EN UN ANGULO DE 45 GRADOS RESPECTO DE UN PRIMER EJE,Y UNA UNIDAD DE MANDRIL MECANICO INTERCAMBIABLE CON UNA UNIDAD DE MANDRIL MOTORIZADO DE ALTA VELOCIDAD, del 13 de Junio de 2011, de BRETON, S.P.A.: Dispositivo de cabezal para máquinas herramientas automáticas con rotación de un segundo eje inclinado en un ángulo de 45° respecto de un primer eje, y una unidad […]
 MAQUINA PARA EL MECANIZADO DE ALTA PRECISION POR BRUÑIDO, del 2 de Junio de 2010, de KADIA PRODUKTION GMBH + CO.: Máquina para el mecanizado de alta precisión de piezas de trabajo por bruñido con un husillo de bruñido montado en una carcasa de husillo […]
MAQUINA PARA EL MECANIZADO DE ALTA PRECISION POR BRUÑIDO, del 2 de Junio de 2010, de KADIA PRODUKTION GMBH + CO.: Máquina para el mecanizado de alta precisión de piezas de trabajo por bruñido con un husillo de bruñido montado en una carcasa de husillo […]
ÓRGANO ELÉCTRICO DE ACCIONAMIENTO UTILIZADO COMO CILÍNDRO DE PRESIÓN DE FLUIDO, del 24 de Junio de 2011, de CKD CORPORATION: Un órgano eléctrico de accionamiento que tiene un cuerpo principal y que puede utilizarse en lugar de un cilindro de presión de fluido que forma parte […]