PINZA DE AGARRE DE RECIPIENTE CON UN SENSOR DE POSICIÓN.
Una pinza (1) de agarre de un recipiente o contenedor que comprende un bastidor principal (2) y unos miembros de soporte movibles (7) para los dedos de agarre (8,
9) que son movibles entre una posición de abiertos y una posición de cerrados, en donde comprende un sensor (20, 21) de detección del desplazamiento de los dedos, que comprende un imán (10), que interactúa con un sensor (4) de efecto de Hall (4), que es responsable de la posición instantánea de los dedos de agarre (8, 9), en donde el imán (10) está fijado a uno de los miembros de soporte (7), y movibles con respecto al sensor (4) de efecto de Hall, fijado al bastidor principal (2), en donde el mencionado bastidor principal (2) alberga un pistón neumático (5), caracterizada porque el pistón neumático (5) acciona una cuña (6), la cual se acopla en forma deslizable en unos miembros de soporte (7), en donde están montados los dedos (8, 9) mediante una conexión del tipo de leva entre unas paredes inclinadas de los miembros de soporte (7) y en donde la cuña interpuesta (6), y moviendo los mencionados dedos (8, 9) de una forma síncrona entre una posición abierta y una posición cerrada
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/069283.
Solicitante: INPECO IP LTD.
Nacionalidad solicitante: Malta.
Dirección: 259 ST. PAUL STREET VALLETTA VLT 1213 MALTA.
Inventor/es: PEDRAZZINI, GIANANDREA.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Diciembre de 2006.
Clasificación Internacional de Patentes:
- B25J13/08V
- B25J15/02P
- B25J19/02E
- G01N35/00R
Clasificación PCT:
- B25J15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › servocontroladas.
- B25J19/02 B25J […] › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos sensibles.
- G01N35/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2356675_T3.pdf

Descripción:
La presente invención está relacionada con una pinza de agarre de un recipiente o contenedor provista con un sensor de posición.
Tal como se utiliza aquí, el término “recipiente o contenedor” significa un artículo que contiene una muestra biológica, y que tiene una abertura tubular para tener acceso a la misma, por ejemplo, un tubo de ensayos. 5
En un laboratorio de química clínica automatizado es necesario con frecuencia el manipular un recipiente o contenedor de muestras mediante una pinza de agarre.
Una unidad de control tiene que comprobar si la pinza de agarre ha cogido el recipiente o no, y también detectar la dimensión transversal del recipiente o contenedor.
Los ejemplos de pinzas de agarre de recipientes o contenedores conocidas son las que se muestran en los 10 documentos US-4801991, US-4730861 y US-5945798.
El objeto de la presente invención es proporcionar unas pinzas de agarre de recipientes o contenedores que sean capaces de poder alimentar la unidad de control con una señal eléctrica indicativa de la posición de las pinzas del recipiente o contenedor.
De acuerdo con la invención el objeto mencionado se consigue mediante unas pinzas de agarre de un 15 recipiente o contenedor tal como se expone en la reivindicación 1.
El sensor de detección puede ser, por ejemplo, un codificador óptico o bien un sensor de efecto Hall.
Las características y ventajas de la presente invención se pondrán en evidencia a partir de la siguiente descripción detallada ilustrada de la misma, exponiendo ejemplos no limitativos en los dibujos adjuntos, en donde:
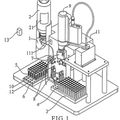
la figura 1 es una vista en perspectiva de una pinza de recipiente o contenedor provista con un sensor de 20 detección del dedo de la pinza de agarre del tipo de efecto de Hall;
la figura 2 es una vista frontal de las pinzas del recipiente o contenedor con los dedos de agarre en la posición abierta;
la figura 3 es una vista en sección de acuerdo con la línea III-III de la figura 2;
la figura 4 es una vista frontal de las pinzas del recipiente o contenedor con los dedos de las pinzas en un 25 posición de agarre del recipiente o contenedor;
la figura 5 es una vista en sección de acuerdo con la línea V-V de la figura 4;
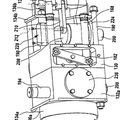
la figura 6 es una vista superior de las pinzas de agarre del recipiente o contenedor;
la figura 7 es una vista en sección de acuerdo con la línea VII-VII de la figura 6, con los dedos de las pinzas en la posición cerrada; 30
la figura 8 es una vista en sección, similar a la figura 7, con los dedos de las pinzas en una posición de agarre del recipiente o contenedor;
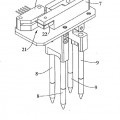
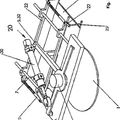
la figura 9 es una vista en perspectiva de las partes internas de unas pinzas de agarre de recipientes o contenedores que incluye un sensor de detección de los dedos que comprende un codificador óptico lineal;
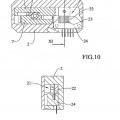
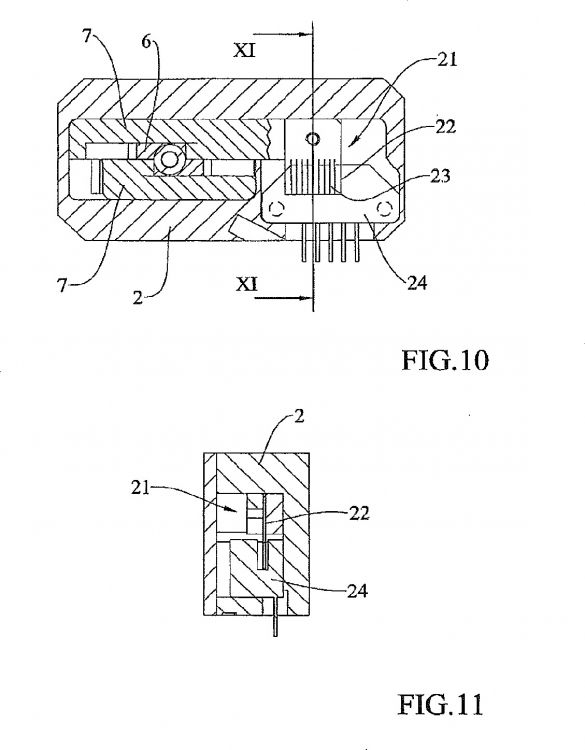
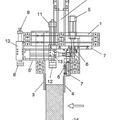
la figura 10 es una vista en sección similar a la figura 5, la cual está relacionada con el conjunto del sensor de 35 las pinzas de la figura 9;
la figura 11 es una vista en sección tomada a lo largo de la línea XI-XI de la figura 10.
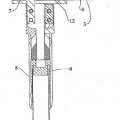
Las pinzas de agarre 1 de recipientes o contenedores comprenden un bastidor principal 2, el cual alberga un pistón 5 neumático (figuras 7-8) para el accionamiento de una cuña 6 la cual por medio de los miembros de soporte 7 incluidos en forma deslizante en una cámara interna 12, desplaza de forma sincrónica los dedos montados de dos en 40 dos 8-9 entre una posición de apertura (figura 2) y una posición de cerrado (figura 7).
Los mencionados miembros 7 de soporte de los dedos se acoplan con la cuña 6, de forma tal que si la cuña 6 se presiona hacia abajo por el pistón 5, los mencionados miembros 7 abren los dedos 8-9 debido la conexión del tipo de leva entre las paredes inclinadas de la cuña 6 y los miembros de soporte 7.
El bastidor principal mencionado 2 soporta un dispositivo 20 de detección del desplazamiento de los dedos, 45 formado por una tarjeta de un circuito 3 fijada al bastidor principal 2, y provista con un sensor de efecto Hall 4, y por un
imán 10 fijado a uno de los dos miembros de soporte de los dedos 7 y por tanto movible con respecto al sensor 4 de efecto Hall (figuras 3, 5, 7 y 8).
La distinta distancia entre el sensor 4 y el imán 10 significa un campo magnético distinto detectado por el sensor 4 de efecto Hall.
Cuando el pistón accionado 5 presiona hacia abajo la cuña 6 (figura 8), los dedos 8-9 se abren y el imán 10 se 5 mueve desde el sensor 4 de efecto Hall fijo.
Por el contrario, cuando el pistón accionado 5 se mueve en forma ascendente conjuntamente con la cuña 6 (figura 7), los dedos 8-9 se mueven hacia una posición cerrada para el agarre de un recipiente o contenedor, y el imán 10 se mueve hacia el sensor fijo 4 de efecto Hall.
Cuando los dedos detienen el movimiento de cierre contra la pared lateral de un recipiente o contenedor, el 10 sensor 4 de efecto Hall detecta una dimensión transversal del recipiente o contenedor agarrado, y suministra una señal eléctrica indicativa del diámetro transversal detectado.
En una realización que no forma parte de la presente invención, el dispositivo de detección 20 formado por el imán 10 y el sensor 4 de efecto Hall puede ser reemplazado por un codificador óptico 21 formado por una tarjeta plana o bien una regleta óptica 22 fijada a uno de los miembros de soporte de los dedos 7, y provista con varias líneas 23 15 ópticas paralelas mediante un contador 24 óptico en forma de C, capaz de contar el numero de líneas 23 que pasan a través del contador óptico con respecto a la dimensión transversal del recipiente o contenedor agarrado.
Reivindicaciones:
1. Una pinza (1) de agarre de un recipiente o contenedor que comprende un bastidor principal (2) y unos miembros de soporte movibles (7) para los dedos de agarre (8, 9) que son movibles entre una posición de abiertos y una posición de cerrados, en donde comprende un sensor (20, 21) de detección del desplazamiento de los dedos, que comprende un imán (10), que interactúa con un sensor (4) de efecto de Hall (4), que es responsable de la posición 5 instantánea de los dedos de agarre (8, 9), en donde el imán (10) está fijado a uno de los miembros de soporte (7), y movibles con respecto al sensor (4) de efecto de Hall, fijado al bastidor principal (2), en donde el mencionado bastidor principal (2) alberga un pistón neumático (5),
caracterizada porque
el pistón neumático (5) acciona una cuña (6), la cual se acopla en forma deslizable en unos miembros de soporte (7), 10 en donde están montados los dedos (8, 9) mediante una conexión del tipo de leva entre unas paredes inclinadas de los miembros de soporte (7) y en donde la cuña interpuesta (6), y moviendo los mencionados dedos (8, 9) de una forma síncrona entre una posición abierta y una posición cerrada.
2. La pinza de agarre del recipiente o contenedor de acuerdo con la reivindicación 1, caracterizada porque la mencionada cuña (6) es movible entre una posición elevada en donde los dedos (7, 8) están cerrados, y una posición 15 descendida en donde los dedos están abiertos.
3. La pinza de agarre del recipiente o contenedor de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizada porque comprende cuatro dedos (8, 9) fijadas de dos en dos para que los miembros de soporte (7) se desplacen sincrónicamente de dos en dos.
Patentes similares o relacionadas:
 DISPOSITIVO DE MANUTENCION DE COGER Y COLOCAR Y METODO PARA SU USO, del 26 de Mayo de 2010, de AEW DELFORD SYSTEMS LIMITED: Un dispositivo de coger y colocar para coger y recolocar un artículo transportado por una superficie de soporte, caracterizado porque comprende:
1) una primera parte que incluye […]
DISPOSITIVO DE MANUTENCION DE COGER Y COLOCAR Y METODO PARA SU USO, del 26 de Mayo de 2010, de AEW DELFORD SYSTEMS LIMITED: Un dispositivo de coger y colocar para coger y recolocar un artículo transportado por una superficie de soporte, caracterizado porque comprende:
1) una primera parte que incluye […]
 DISPOSITIVO PARA LA RECOGIDA Y TRANSPORTE DE UN PRODUCTO, del 12 de Abril de 2010, de MULTIVAC SEPP HAGGENMULLER GMBH & CO. KG: Dispositivo para la recogida y transporte de un producto que presenta medios de recogida que se deslizan debajo del producto por medio de un dispositivo de empuje , […]
DISPOSITIVO PARA LA RECOGIDA Y TRANSPORTE DE UN PRODUCTO, del 12 de Abril de 2010, de MULTIVAC SEPP HAGGENMULLER GMBH & CO. KG: Dispositivo para la recogida y transporte de un producto que presenta medios de recogida que se deslizan debajo del producto por medio de un dispositivo de empuje , […]
 DISPOSITIVO ENGANCHADOR PARA UN ROBOT O CARGADOR DE PORTICO, del 7 de Diciembre de 2009, de DURR ECOCLEAN GMBH: Dispositivo enganchador para un robot o para un cargador de pórtico, comprendiendo al menos una mordaza (138a, 138b) de enganche desplazable linealmente, […]
DISPOSITIVO ENGANCHADOR PARA UN ROBOT O CARGADOR DE PORTICO, del 7 de Diciembre de 2009, de DURR ECOCLEAN GMBH: Dispositivo enganchador para un robot o para un cargador de pórtico, comprendiendo al menos una mordaza (138a, 138b) de enganche desplazable linealmente, […]
 CABEZAL PALETIZADOR/DESPALETIZADOR DE ACCIONAMIENTO ROBOTIZADO, del 10 de Noviembre de 2009, de ALVAREZ RODRIGUEZ,EDUARDO: Cabezal paletizador/despaletizador de accionamiento robotizado.
El cabezal incluye dos palas y , siendo la pala fija y la pala móvil, tanto en […]
CABEZAL PALETIZADOR/DESPALETIZADOR DE ACCIONAMIENTO ROBOTIZADO, del 10 de Noviembre de 2009, de ALVAREZ RODRIGUEZ,EDUARDO: Cabezal paletizador/despaletizador de accionamiento robotizado.
El cabezal incluye dos palas y , siendo la pala fija y la pala móvil, tanto en […]
APARATO PARA RETIRAR TAPAS DE RECIPIENTES DE MUESTRAS TUBULARES, del 6 de Febrero de 2012, de INPECO IP LTD: Aparato para retirar tapas de recipientes tubulares de muestras, que comprende un conjunto de cabezal que es móvil por encima de un recipiente […]
 METODO PARA LA GESTION DE SISTEMAS DE CELULA DE TRABAJO BASADO EN UN SISTEMA DE GESTION DE LA AUTOMATIZACION, del 26 de Febrero de 2010, de INPECO S.R.L: Método para la gestión de Sistemas de Célula de Trabajo (WS) usando un Sistema de Gestión de Automatización (AMS) para controlar una pluralidad […]
METODO PARA LA GESTION DE SISTEMAS DE CELULA DE TRABAJO BASADO EN UN SISTEMA DE GESTION DE LA AUTOMATIZACION, del 26 de Febrero de 2010, de INPECO S.R.L: Método para la gestión de Sistemas de Célula de Trabajo (WS) usando un Sistema de Gestión de Automatización (AMS) para controlar una pluralidad […]
 APARATO Y METODO PARA MANEJAR FLUIDOS PARA ANALISIS, del 17 de Febrero de 2010, de ABBOTT LABORATORIES: Un dispositivo de manejo de espécimen, que incluye: una plataforma que tiene una pluralidad de posiciones definidas en la misma, incluyendo una pluralidad de […]
APARATO Y METODO PARA MANEJAR FLUIDOS PARA ANALISIS, del 17 de Febrero de 2010, de ABBOTT LABORATORIES: Un dispositivo de manejo de espécimen, que incluye: una plataforma que tiene una pluralidad de posiciones definidas en la misma, incluyendo una pluralidad de […]
 DISPOSITIVO PARA LA EXTRACCION AUTOMATICA DE MUESTRAS DE LIQUIDO DE RECIPIENTES COLECTORES Y PROCEDIMIENTO PARA REALIZAR DICHA EXTRACCION, del 25 de Enero de 2010, de GRIFOLS, S.A: Dispositivo para la extracción automática de muestras de líquido de recipientes colectores y procedimiento para realizar dicha extracción.
Dispositivo para […]
DISPOSITIVO PARA LA EXTRACCION AUTOMATICA DE MUESTRAS DE LIQUIDO DE RECIPIENTES COLECTORES Y PROCEDIMIENTO PARA REALIZAR DICHA EXTRACCION, del 25 de Enero de 2010, de GRIFOLS, S.A: Dispositivo para la extracción automática de muestras de líquido de recipientes colectores y procedimiento para realizar dicha extracción.
Dispositivo para […]