Cálculo de desfase de señal de velocidad de guiñada.
Un método para calcular el desfase de una señal de velocidad guiñada (y),
que se proporciona mediante un sensor de velocidad de guiñada (3) en un vehículo a motor, implementándose el método en un sistema electrónico de un automóvil que comprende una unidad de control (ECU), una dirección de piñón y cremallera asistida o alimentada eléctricamente con un sensor de ángulo de piñón o dirección (2) que genera una señal de velocidad de ángulo de piñón (p), sensores de velocidad de rueda (1) asociados con al menos una rueda de carretera que generan al menos una señal de velocidad de rueda (w) y un sensor de velocidad de guiñada (3) que genera la señal de velocidad de guiñada (y), en el que el método comprende la etapa de
a. Observar la señal de ángulo de piñón p, la al menos una señal de velocidad de rueda w, la señal de velocidad de guiñada y durante un tiempo (t); caracterizado por que el método comprende las siguientes etapas:
b. Si la señal de velocidad de ángulo de piñón (p) está por debajo de un umbral pmax, y la señal de velocidad de rueda (w) está por debajo de un umbral wmax, y la señal de velocidad de guiñada (y) está por debajo de un umbral ymax, entonces comenzar un primer periodo de tiempo de espera t1;
c. Si tras el primer periodo de tiempo t1 las señales p, w e y siguen por debajo de sus umbrales, comenzar entonces un cálculo del desfase de velocidad de guiñada (yo) durante un segundo periodo de tiempo t2 de umbral, en el que el promedio de velocidad de guiñada (ya) se adquiere durante este segundo periodo de tiempo t2; y
d. Si durante el periodo t2 las señales p, w e y permanecen por debajo de sus umbrales, entonces el promedio de velocidad de guiñada (ya) se almacena como desfase de velocidad de guiñada (yo) en la ECU;
e. Si las señales p, w e y permanecen por debajo de sus umbrales, continuar entonces con la etapa c, si al menos una de las señales p, w e y sobrepasaron los umbrales respectivos, continuar entonces con la etapa a.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/001630.
Solicitante: THYSSENKRUPP PRESTA AG.
Nacionalidad solicitante: Liechtensein.
Dirección: ESSANESTRASSE 10 9492 ESCHEN LIECHTENSTEIN.
Inventor/es: ARÁNYI,MIKLÓS, SZEPESSY,IMRE, BENYO,IMRE, DÓRA,SZABOLCS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/1755 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- B60T8/88 B60T 8/00 […] › con medios que responden a un fallo, es decir medios para detectar o indicar un funcionamiento defectuoso de los medios de control que responden a la condición de velocidad.
- B62D6/00 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
PDF original: ES-2543554_T3.pdf
Fragmento de la descripción:
Cálculo de desfase de señal de velocidad de guiñada La presente invención se refiere a un método para calcular el desfase de una señal de velocidad de guiñada que se proporciona mediante un sensor de velocidad de guiñada en un vehículo a motor.
La velocidad de guiñada es la velocidad angular del movimiento de un vehículo alrededor de su eje vertical. Los sistemas de ayuda al conductor usan la velocidad de guiñada por ejemplo para comparar la velocidad angular, que se debe al radio de una curva y la velocidad del vehículo, con una velocidad de guiñada actual. Cualquier desviación de la velocidad de guiñada esperada puede deberse a la pérdida de control del conductor, que después puede corregirse, si es posible, mediante el sistema de ayuda.
Los sensores de velocidad de guiñada son por tanto sensores importantes en los vehículos modernos.
En el control de sistemas eléctricos de dirección asistida para vehículos de carretera, los sensores de guiñada pueden controlarse para controlar el sistema de dirección. Una función simple puede ser comparar la posición central del sistema de dirección, en la que un vehículo debería conducir en línea recta, con la velocidad de guiñada actual que debería ser en este caso cero (0) .
Generalmente, y especialmente en la implementación antes mencionada, es aconsejable conocer el desfase del sensor de velocidad de guiñada en el vehículo. El desfase se define como la desviación de la señal del sensor de velocidad de guiñada desde 0 cuando el vehículo se encuentra en reposo.
El documento alemán DE19919860C2 describe un método para calcular el desfase de una señal de sensor de ángulo de dirección comparando la diferencia entre una señal de velocidad de guiñada esperada y una medida en reposo con la diferencia respectiva en la señal de velocidad de guiñada cuando el vehículo se está moviendo. El desfase del sensor de velocidad de guiñada y su variación en el tiempo durante el uso del vehículo no se determinan con precisión.
En el documento alemán DE4130142A1 se divulga un sistema para calcular el desfase de un sensor de ángulo de dirección. El cálculo se inicia solo cuando se detectan las velocidades del vehículo y los pequeños ángulos de dirección. El sistema asume entonces que el vehículo está viajando en una línea recta. No existe un cálculo preciso de desfase para los sensores de señal de velocidad de guiñada divulgados.
Se conoce a partir del documento US 4.470.124 que el desfase de los sensores de velocidad de guiñada puede calcularse basándose en el valor medio de señal de velocidad de guiñada. La señal de velocidad de guiñada cambia entre valores positivos y negativos. En la práctica, el promedio a lo largo del tiempo debería ser cero. Cualquier desviación desde cero de la velocidad de guiñada media se toma como un desfase del sensor. Este método no es muy preciso. Además, existen métodos para realizar compensación de desfase basada en temperatura en señales de velocidad de guiñada. El desfase, sin embargo, no queda influenciado únicamente por la temperatura, sino también por ejemplo por el envejecimiento y otros factores.
Se conoce que la patente europea EP1264749B1 compensa un sistema de medición de velocidad de guiñada de un vehículo, en el que el sistema tiene un sensor de velocidad de guiñada y unas partes de baja frecuencia de la señal se filtran fuera de la señal del sensor de velocidad de guiñada. El sistema se compensa solo durante periodos de tiempo en los que la señal filtrada no sobrepasa una cantidad predeterminada en un periodo de tiempo predeterminado. Estas condiciones se aplican cuando el vehículo se encuentra en reposo o viajando en una dirección recta. No existe divulgación referente a los medios y métodos aplicados para determinar la detención del vehículo.
Por tanto, es un objeto de la presente invención proporcionar un método para determinar el desfase de una señal de sensor de velocidad de guiñada en un vehículo con alta precisión, especialmente para proporcionar un método para determinar el desfase repetidamente durante el uso de un vehículo.
El documento EP0471299A2 divulga un método de acuerdo con el preámbulo de la reivindicación 1. Este objeto se logra mediante un método con las características de la reivindicación 1.
El método se realiza en un sistema electrónico de un automóvil que comprende una unidad de control, con una dirección de piñón y cremallera asistida o alimentada eléctricamente con un sensor de ángulo de dirección o piñón que genera una señal de velocidad de ángulo de piñón p, sensores de velocidad de rueda asociados con al menos una rueda de carretera que generan al menos una señal de velocidad de rueda w, y un sensor de velocidad de guiñada que genera una señal de velocidad de guiñada y. El método comprende las siguientes etapas:
a. Observar la señal de ángulo de piñón p, la al menos una señal de velocidad de rueda w, y la señal de velocidad de guiñada y, durante un tiempo t;
b. Si la señal de la velocidad de ángulo de piñón p está por debajo de un umbral pmax, y la señal de velocidad de rueda w está por debajo de un umbral wmax, y la señal de velocidad de guiñada y está por debajo de un umbral ymax, entonces comenzar un primer periodo de tiempo t1 de espera;
c. Si después del primer periodo de tiempo t1 las señales p, w, e y siguen por debajo de sus umbrales, comenzar entonces un cálculo del desfase de velocidad de guiñada yo durante un segundo periodo de tiempo t2 de umbral, en el que el promedio de velocidad de guiñada ya se adquiere durante este segundo periodo de tiempo t2;
d. Si durante el segundo periodo de tiempo t2 las señales p, w e y permanecen por debajo de sus umbrales, entonces el promedio obtenido de velocidad de guiñada ya se almacena como desfase de velocidad de guiñada yo;
e. Si las señales p, w e y todavía permanecen por debajo de los umbrales, continuar con la etapa c, si al menos una de las señales p, w e y sobrepasó los umbrales respectivos, continuar entonces con la etapa a.
En una realización preferente fue posible interrumpir el procedimiento del método de cálculo de desfase después de la etapa e para un tercer periodo de tiempo t3 de umbral. En otras palabras: si las señales p, w e y todavía permanecen por debajo de sus umbrales, entonces tras haber pasado un tercer periodo de tiempo t3 de umbral continuar con la etapa c y/o si al menos una de las señales p, w, e y sobrepasó los umbrales respectivos, entonces tras haber pasado un tercer periodo de tiempo t3 de umbral continuar con la etapa a.
Este método permite que la unidad de control determine el desfase de la velocidad de guiñada yo repetidamente y con gran precisión mientras que el vehículo se encuentra en uso, tomando en cuenta por tanto el cambio de temperatura y similares. Volver a calcular el valor yo se lleva a cabo cada vez cuando las tres señales están por debajo de sus respectivos umbrales durante un tiempo t que es al menos la suma del primer periodo de tiempo y el segundo periodo de tiempo t1 + t2.
Las señales p, w, e y pueden filtrarse, en caso necesario.
Puede existir más de un sensor de velocidad de rueda. En este caso, la señal w es la suma de las velocidades de rueda, por ejemplo de las ruedas del mismo eje, o la suma de cuatro velocidades de rueda. En este caso, el umbral wmax es el límite superior para la suma de las velocidades de rueda.
Los valores adecuados para los límites o umbrales pmax, wmax e ymax pueden ser:
pmax = 20 grados por segundo (dps) , preferentemente 10 dps. wmax= 1, 0 revoluciones por minuto (rpm) , preferentemente 0, 5 rpm, y ymax = 20 grados por segundo (dps) , preferentemente 10 dps, y más preferentemente 1 dps.
En el contexto de esta memoria descriptiva, el término "grados" se refiere a ángulos, es decir, 1/360 de un círculo completo, y no a temperatura.
El primer periodo de tiempo t1 puede ser 1 segundo, y el segundo periodo de tiempo t2 puede ser 0, 1 segundos. En el contexto de esta memoria descriptiva, el término "t1" se refiere al primer periodo de tiempo y el término "t2" se 45 refiere al segundo periodo de tiempo. El tercer periodo de tiempo puede ser 1 segundo o 10 segundos.
Una realización ejemplar de la presente invención se describe en más detalle a continuación basándose en el dibujo, en el que:
Figura 1: muestra un vehículo a motor con un sistema de dirección electrónico y sensores en una representación esquemática y:
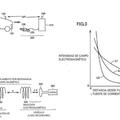
Figura 2: muestra un conjunto de curvas de señales de sensor a lo largo del tiempo con umbrales o límites aplicables e intervalos de tiempo representativos.
... [Seguir leyendo]
Reivindicaciones:
1. Un método para calcular el desfase de una señal de velocidad guiñada (y) , que se proporciona mediante un sensor de velocidad de guiñada (3) en un vehículo a motor, implementándose el método en un sistema electrónico de un automóvil que comprende una unidad de control (ECU) , una dirección de piñón y cremallera asistida o alimentada eléctricamente con un sensor de ángulo de piñón o dirección (2) que genera una señal de velocidad de ángulo de piñón (p) , sensores de velocidad de rueda (1) asociados con al menos una rueda de carretera que generan al menos una señal de velocidad de rueda (w) y un sensor de velocidad de guiñada (3) que genera la señal de velocidad de guiñada (y) , en el que el método comprende la etapa de
a. Observar la señal de ángulo de piñón p, la al menos una señal de velocidad de rueda w, la señal de velocidad de guiñada y durante un tiempo (t) ; caracterizado por que el método comprende las siguientes etapas:
b. Si la señal de velocidad de ángulo de piñón (p) está por debajo de un umbral pmax, y la señal de velocidad de
rueda (w) está por debajo de un umbral wmax, y la señal de velocidad de guiñada (y) está por debajo de un 15 umbral ymax, entonces comenzar un primer periodo de tiempo de espera t1;
c. Si tras el primer periodo de tiempo t1 las señales p, w e y siguen por debajo de sus umbrales, comenzar entonces un cálculo del desfase de velocidad de guiñada (yo) durante un segundo periodo de tiempo t2 de umbral, en el que el promedio de velocidad de guiñada (ya) se adquiere durante este segundo periodo de tiempo t2; y d. Si durante el periodo t2 las señales p, w e y permanecen por debajo de sus umbrales, entonces el promedio de velocidad de guiñada (ya) se almacena como desfase de velocidad de guiñada (yo) en la ECU;
e. Si las señales p, w e y permanecen por debajo de sus umbrales, continuar entonces con la etapa c, si al menos una de las señales p, w e y sobrepasaron los umbrales respectivos, continuar entonces con la etapa a.
2. El método de la reivindicación 1, caracterizado por que las señales p, w y/o y se filtran mediante filtros de paso bajo.
3. El método de una de las reivindicaciones anteriores, caracterizado por que se proporciona más de un sensor de velocidad de rueda, y por que la señal w es la suma de las velocidades de rueda. 30
4. El método de la reivindicación 3, caracterizado por que el umbral wmax se define como el límite superior para la suma de las velocidades de rueda.
5. El método de una de las reivindicaciones anteriores, caracterizado por que pmax = 20 grados por segundo. 35
6. El método de una de las reivindicaciones anteriores, caracterizado por que pmax = 10 grados por segundo.
7. El método de una de las reivindicaciones anteriores, caracterizado por que wmax = 1, 0 revoluciones por minuto.
8. El método de una de las reivindicaciones anteriores, caracterizado por que wmax = 0, 5 revoluciones por minuto.
9. El método de una de las reivindicaciones anteriores, caracterizado por que ymax = 20 grados por segundo.
10. El método de una de las reivindicaciones anteriores, caracterizado por que ymax = 0, 1 grados por segundo. 45
11. El método de una de las reivindicaciones anteriores, caracterizado por que el primer periodo de tiempo t1 no es menor de 1 segundo y/o el segundo periodo de tiempo t2 no es menor de 0, 1 segundos.
Patentes similares o relacionadas:
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Procedimiento para el control de la dirección y el comportamiento de un vehículo, del 13 de Noviembre de 2019, de Sentient IP AB: Un procedimiento para controlar un accionador de par de torsión de retroalimentación y al menos un accionador de guiñada y/o del estado lateral del vehículo, tal como […]
 Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Sistema de modificación de la relación de dirección para vehículo con brazo telescópico y vehículo correspondiente, del 3 de Julio de 2019, de MANITOU BF: Sistema de modificación de la relación de dirección para un vehículo con brazo telescópico inclinable, comprendiendo el vehículo ruedas directrices […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Máquina automóvil con instalación de carga, del 8 de Mayo de 2019, de Wacker Neuson Linz GmbH: Máquina automóvil con una instalación de carga , un accionamiento de rodadura y un tren de rodadura , tal como una cargadora de ruedas, una cargadora telescópica o similares, […]
Procedimiento de estabilización de conducción, dispositivo de estabilización de conducción y vehículo equipado con dicho dispositivo, del 6 de Mayo de 2019, de WABCO GMBH: Procedimiento de estabilización de conducción en el que, para la estabilización de un vehículo , especialmente de un vehículo industrial, se cambia un ángulo […]
Sistema de guiado de vehículo, del 11 de Diciembre de 2018, de Topcon Precision Agriculture Pty Ltd: Una combinación de sistema de guiado de vehículo y mecanismo de volante para un vehículo, con el vehículo incluyendo un mecanismo de volante que incluye un volante […]