Sistema de amortiguador de dirección, y vehículo de tipo para montar a horcajadas con el mismo.
Sistema de amortiguador de dirección que comprende:
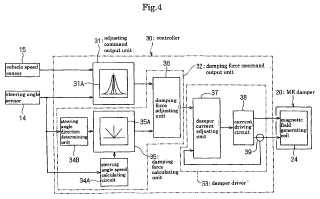
un amortiguador (20) dispuesto para generar una fuerza de amortiguación de dirección;
una unidad (31A) de almacenamiento dispuesta para almacenar información de control en la que áreaspara determinar una cantidad de ajuste de la fuerza de amortiguación se dividen por un intervalo de ángulosde dirección según la velocidad del vehículo, en el que el intervalo de ángulos de dirección se hace másestrecho a medida que aumenta la velocidad del vehículo;
una unidad (31) de salida de órdenes de ajuste dispuesta para emitir una orden de ajuste de fuerza deamortiguación basándose en la información de control almacenada en la unidad (31A) de almacenamientosegún una de las áreas a la que pertenecen la velocidad del vehículo y el ángulo de dirección;
una unidad (32) de salida de órdenes de fuerza de amortiguación dispuesta para emitir una orden de fuerzade amortiguación al amortiguador (20) según la orden de ajuste de fuerza de amortiguación; y
un accionador (33) de amortiguador dispuesto para accionar el amortiguador (20) y ajustar la fuerza deamortiguación basándose en la orden de fuerza de amortiguación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09007084.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: HARA,NOBUO, OOMURA,YASUHIRO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62K21/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › B62K 21/00 Elementos de la dirección (elementos de la dirección adaptados especialmente a un tipo especial de ciclo especificado en los grupos B62K 1/00 - B62K 17/00, ver el grupo apropiado). › Amortiguadores de dirección (amortiguadores en general F16F).
- F16F9/12 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 9/00 Resortes, amortiguadores de vibraciones, amortiguadores de choques o amortiguadores de movimiento de estructura similar que utilizan un fluido o un medio equivalente como agente de amortiguamiento (F16F 5/00 tiene prioridad; uniones de válvulas a cuerpos elásticos inflables B60C 29/00; accesorios de maniobra para puertas que emplean un sistema de frenado por fluido E05F). › Dispositivos con uno o varios álabes rotativos girando en el fluido, no teniendo importancia el efecto de estrangulamiento.
- F16F9/46 F16F 9/00 […] › permitiendo el control a distancia.
PDF original: ES-2436428_T3.pdf
Fragmento de la descripción:
Sistema de amortiguador de dirección, y vehículo de tipo para montar a horcajadas con el mismo
ANTECEDENTES DE LA INVENCIÓN
1. Campo de la invención
La presente invención se refiere a un sistema de amortiguador de dirección para su uso en un vehículo, y a un vehículo de tipo para montar a horcajadas equipado con el sistema de amortiguador de dirección.
2. Descripción de la técnica relacionada
De manera convencional, un amortiguador hidráulico es ampliamente conocido como amortiguador de dirección montado en un vehículo de tipo para montar a horcajadas. El amortiguador hidráulico utiliza una fuerza de amortiguación generada cuando el aceite hidráulico en una cámara de aceite pasa por un orificio, y puede obtener una fuerza de amortiguación según la velocidad de ángulo de dirección. Recientemente se han dado a conocer sistemas de amortiguador de dirección de tipo controlado electrónicamente. Véase la publicación de patente japonesa no examinada n.º 2003-170883 (páginas 3- 6, figuras 1 y 2) y la publicación de patente japonesa no examinada n.º S63- 64888 (páginas 3- 4, dibujos) , por ejemplo.
Cuando la velocidad de ángulo de dirección del manillar en la publicación de patente japonesa no examinada n.º 2003-170883 es igual o menor que un primer umbral, se genera una fuerza de amortiguación relativamente pequeña y esta fuerza de amortiguación se ajusta según la velocidad del vehículo. Cuando la velocidad de ángulo de dirección supera el primer umbral y es igual o menor que un segundo umbral, se genera una fuerza de amortiguación media y esta fuerza de amortiguación se ajusta según la velocidad de ángulo de dirección. Cuando la velocidad de ángulo de dirección supera el segundo umbral, se genera una fuerza de amortiguación grande y esta fuerza de amortiguación se ajusta según la velocidad de ángulo de dirección.
Cuando la velocidad del vehículo y el ángulo de dirección en la publicación de patente japonesa no examinada S6364888 superan valores límite umbral predeterminados, un dispositivo de control controlará una memoria intermedia para aumentar una fuerza de amortiguación.
Las dos técnicas descritas en la publicación de patente japonesa no examinada n.º 2003-170883 y la publicación de patente japonesa no examinada S63-64888 ajustan fuerzas de amortiguación según las velocidades del vehículo. Sin embargo, difícilmente puede decirse que estas técnicas sean plenamente satisfactorias con respecto tanto a la carga del conductor como a la capacidad de control en las operaciones de dirección. Cuando se requiere un control de dirección relativamente grande durante una conducción a alta velocidad, tal como cuando el vehículo toma una curva a alta velocidad, por ejemplo, una fuerza de amortiguación grande generada según la velocidad del vehículo privará al conductor de una sensación natural de operación. A la inversa, una disminución de la función para ajustar la fuerza de amortiguación según la velocidad del vehículo aumentará la carga del conductor para estabilizar una operación de dirección durante una conducción a alta velocidad. Además, cuando el vehículo salta como hace un vehículo todoterreno, el conductor gira el manillar en gran medida en el aire para controlar el vehículo. En esos momentos, una fuerza de amortiguación grande dará como resultado una operación de dirección pesada, empeorando así la sensación de la operación de dirección. El documento EP-A-1248013 da a conocer generar una fuerza de amortiguación en un amortiguador de dirección sólo tras una acción de maniobra causada de manera no intencionada cuando es realmente necesario limitar el giro del manillar, según si la causa de la acción de maniobra es intencionada o no intencionada. Un amortiguador de dirección de tipo rotación está dotado coaxialmente de un árbol de dirección, y la generación de una fuerza de amortiguación o fuerza de amortiguación cero se selecciona mediante cambio mediante una válvula variable prevista en un paso de derivación para la comunicación entre una cámara de líquido derecha y una cámara de líquido izquierda del amortiguador de dirección. El cambio se controla mediante un dispositivo de control, que funciona basándose en la dirección de un momento ejercido sobre el árbol de dirección detectado por un sensor de momento y la magnitud y sentido de la velocidad angular de rotación en relación con el giro del árbol de dirección detectada por un sensor de velocidad angular de rotación, y así controla que se genere una fuerza de amortiguación sólo cuando está presente una acción de giro de manillar causada de manera no intencionada en sentido opuesto al momento y la velocidad angular de rotación ha superado un valor umbral predeterminado. El documento EP-A-1459971 da a conocer un amortiguador de dirección en una motocicleta que incluye un álabe que divide una cámara en un alojamiento de amortiguador en dos cámaras de aceite, fluyendo fluido hidráulico entre las dos cámaras para generar fuerza de atenuación. El amortiguador de dirección también incluye un árbol de amortiguador conectado al álabe y que soporta el álabe para un movimiento basculante con respecto al alojamiento, y una válvula de control de presión hidráulica. El alojamiento está unido a un tubo principal, y el árbol de amortiguador está unido a un sistema de dirección. Cuando el tubo principal ha de estar unido al alojamiento, el alojamiento se extiende hacia atrás por detrás de un puente superior, y un solenoide lineal para accionar y controlar la válvula de control de presión hidráulica está unido al alojamiento y dispuesto por debajo de la extensión del mismo.
SUMARIO DE LA INVENCIÓN
Con el fin de superar los problemas descritos anteriormente, realizaciones preferidas de la presente invención proporcionan un sistema de amortiguador de dirección, y un vehículo de tipo para montar a horcajadas equipado con el sistema de amortiguador de dirección, que puede ajustar una fuerza de amortiguación de dirección a un nivel adecuado para estados de conducción del vehículo, reduciendo así la carga del conductor y garantizando una capacidad de control excelente durante operaciones de dirección.
Los presentes inventores han dirigido su atención a los intervalos de ángulos de dirección según las velocidades del vehículo con el fin de ajustar una fuerza de amortiguación de dirección a un nivel adecuado para un estado de conducción del vehículo. Es decir, los estados de conducción del vehículo que implican operaciones de dirección pueden dividirse en un estado de conducción en recta, un estado de conducción en curva y un estado de conducción especial tal como al saltar. Los intervalos de ángulos de dirección en operaciones de dirección concebibles en los diversos estados de conducción aumentan en el orden de estado de conducción en recta, estado de conducción en curva y estado de conducción especial tal como al saltar. Los intervalos de ángulos de dirección también tienden a hacerse menores a medida que aumenta la velocidad del vehículo.
Por tanto, pueden detectarse la velocidad del vehículo y el ángulo de dirección del vehículo durante una conducción, y puede realizarse una determinación de si el ángulo de dirección detectado entra dentro de un intervalo de ángulos de dirección determinado de antemano según la velocidad del vehículo. Este procedimiento indicará un estado de conducción del vehículo en ese momento. Simplemente es necesario generar una fuerza de amortiguación según este estado de conducción. Específicamente, en un estado de conducción en recta, el conductor mantiene el equilibrio del vehículo mientras lleva a cabo operaciones de dirección con ángulos de dirección pequeños. En este caso, la fuerza de amortiguación es reducida para no interferir con acción de dirección natural. Por otro lado, la fuerza de amortiguación aumenta para un estado de conducción en curva para reducir la carga del conductor para estabilizar una operación de dirección. La fuerza de amortiguación se hace pequeña en estados de conducción especiales, tales como al saltar, en un contraviraje para hacer que la rueda trasera patine, y al hacer un caballito, para permitir que el conductor lleve a cabo operaciones de dirección con libertad. Por tanto puede realizarse un sistema de amortiguador de dirección que ajusta la fuerza de amortiguación según los estados de conducción según lo anterior, aligerando así la carga del conductor que va asociada a operaciones de dirección, y garantizando una capacidad de control excelente.
Basándose en los hallazgos anteriores, realizaciones preferidas de la presente invención proporcionan las siguientes construcciones.
Según... [Seguir leyendo]
Reivindicaciones:
1. Sistema de amortiguador de dirección que comprende:
un amortiguador (20) dispuesto para generar una fuerza de amortiguación de dirección;
una unidad (31A) de almacenamiento dispuesta para almacenar información de control en la que áreas para determinar una cantidad de ajuste de la fuerza de amortiguación se dividen por un intervalo de ángulos de dirección según la velocidad del vehículo, en el que el intervalo de ángulos de dirección se hace más estrecho a medida que aumenta la velocidad del vehículo;
una unidad (31) de salida de órdenes de ajuste dispuesta para emitir una orden de ajuste de fuerza de amortiguación basándose en la información de control almacenada en la unidad (31A) de almacenamiento según una de las áreas a la que pertenecen la velocidad del vehículo y el ángulo de dirección;
una unidad (32) de salida de órdenes de fuerza de amortiguación dispuesta para emitir una orden de fuerza de amortiguación al amortiguador (20) según la orden de ajuste de fuerza de amortiguación; y
un accionador (33) de amortiguador dispuesto para accionar el amortiguador (20) y ajustar la fuerza de amortiguación basándose en la orden de fuerza de amortiguación.
2. Sistema de amortiguador de dirección según la reivindicación 1, en el que:
la información de control almacenada en la unidad (31A) de almacenamiento incluye un primer intervalo de ángulos de dirección (SA1) que corresponde a un intervalo de ángulos de dirección aplicable cuando el vehículo está en un estado de conducción en curva; y
la unidad (31) de salida de órdenes de ajuste está dispuesta para emitir una orden de ajuste para generar una primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área dentro del primer intervalo de ángulos de dirección (SA1) , y para emitir una orden de ajuste para generar una segunda fuerza de amortiguación menor que la primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área fuera del primer intervalo de ángulos de dirección (SA1) .
3. Sistema de amortiguador de dirección según la reivindicación 1, en el que:
la información de control almacenada en la unidad (31A) de almacenamiento incluye un primer intervalo de ángulos de dirección (SA2) que corresponde a un intervalo de ángulos de dirección aplicable cuando el vehículo está en un estado de conducción en recta; y
la unidad (31) de salida de órdenes de ajuste está dispuesta para emitir una orden de ajuste para generar una primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área fuera del primer intervalo de ángulos de dirección (SA2) , y para emitir una orden de ajuste para generar una fuerza de amortiguación menor que la primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área dentro del primer intervalo de ángulos de dirección (SA2) .
4. Sistema de amortiguador de dirección según la reivindicación 1, en el que:
la información de control almacenada en la unidad (31A) de almacenamiento incluye un primer intervalo de ángulos de dirección (SA1) que corresponde a un intervalo de ángulos de dirección aplicable cuando el vehículo está en un estado de conducción en curva, y un segundo intervalo de ángulos de dirección (SA2) dentro del primer intervalo de ángulos de dirección y que corresponde a un intervalo de ángulos de dirección aplicable cuando el vehículo está en un estado de conducción en recta; y
la unidad (31) de salida de órdenes de ajuste está dispuesta para emitir una orden de ajuste para generar una primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área fuera del segundo intervalo de ángulos de dirección (SA2) y dentro del primer intervalo de ángulos de dirección (SA1) , para emitir una orden de ajuste para generar una segunda fuerza de amortiguación menor que la primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área fuera del primer intervalo de ángulos de dirección (SA1) , y para emitir una orden de ajuste para generar una tercera fuerza de amortiguación menor que la primera fuerza de amortiguación cuando la velocidad del vehículo y el ángulo de dirección pertenecen a un área dentro del segundo intervalo de ángulos de dirección (SA2) .
5. Sistema de amortiguador de dirección según la reivindicación 1, en el que la cantidad de ajuste de la fuerza de amortiguación almacenada en la unidad (31A) de almacenamiento varía gradualmente con la distancia desde una línea de límite que divide las áreas.
6. Sistema de amortiguador de dirección según la reivindicación 1, en el que la unidad (32) de salida de órdenes de fuerza de amortiguación incluye:
una unidad (34A) de cálculo de velocidad de ángulo de dirección dispuesta para calcular la velocidad de ángulo de dirección;
una unidad (35) de cálculo de fuerza de amortiguación dispuesta para emitir una orden inicial de la fuerza de amortiguación según la velocidad de ángulo de dirección de manera que la fuerza de amortiguación se hace mayor a medida que aumenta la velocidad de ángulo de dirección; y
una unidad (36) de ajuste de fuerza de amortiguación que funciona en respuesta a la orden de ajuste de fuerza de amortiguación desde la unidad (31) de salida de órdenes de ajuste para ajustar la orden inicial de la fuerza de amortiguación y para emitir la orden de fuerza de amortiguación al amortiguador (20) .
7. Sistema de amortiguador de dirección según la reivindicación 6, en el que la unidad (35) de cálculo de fuerza de amortiguación está dispuesta, cuando se realiza una acción de dirección en un sentido para aumentar el ángulo de dirección, para emitir la orden inicial de la fuerza de amortiguación según la velocidad de ángulo de dirección de manera que la fuerza de amortiguación se hace mayor a medida que aumenta la velocidad de ángulo de dirección, y cuando se realiza una acción de dirección en un sentido para disminuir el ángulo de dirección, para emitir una orden para minimizar sustancialmente la fuerza de amortiguación.
8. Sistema de amortiguador de dirección según la reivindicación 6, en el que la unidad (35) de cálculo de fuerza de amortiguación está dispuesta para ajustar la fuerza de amortiguación según la velocidad de ángulo de dirección de manera que la fuerza de amortiguación se hace mayor a medida que aumenta la velocidad del vehículo.
9. Sistema de amortiguador de dirección según la reivindicación 1, en el que:
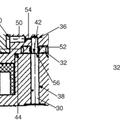
el amortiguador (20) incluye un primer elemento (21) y un segundo elemento (22) uno enfrente del otro, interponiéndose un fluido (23) magnético entre los elementos (21, 22) primero y segundo, y estando dispuesta una bobina (24) generadora de campo magnético para aplicar un campo magnético al fluido (23) magnético, estando uno del primer elemento (21) y el segundo elemento (22) dispuesto para conectarse a un cuerpo del vehículo, y estando el otro del primer elemento (21) y el segundo elemento (22) dispuesto para conectarse a un manillar; y
el accionador (33) de amortiguador incluye una unidad (38) de control de corriente dispuesta para ajustar un valor de corriente aplicado a la bobina (24) generadora de campo magnético del amortiguador (20) basándose en la orden de fuerza de amortiguación.
10. Sistema de amortiguador de dirección según la reivindicación 1, que comprende además:
una unidad (34A) de cálculo de velocidad de ángulo de dirección para calcular la velocidad de ángulo de dirección;
en el que:
la unidad (31A) de almacenamiento está dispuesta para almacenar información de control en la que áreas para determinar cantidades de ajuste de la fuerza de amortiguación se dividen por un intervalo de velocidades de ángulo de dirección según la velocidad del vehículo, volviéndose el intervalo de velocidades de ángulo de dirección más estrecho a medida que aumenta la velocidad del vehículo;
la unidad (31) de salida de órdenes de ajuste está dispuesta, usando la información de control almacenada en la unidad (31A) de almacenamiento, para emitir una orden de ajuste de fuerza de amortiguación según una de las áreas a la que pertenecen la velocidad del vehículo y la velocidad de ángulo de dirección calculada.
11. Sistema de amortiguador de dirección según la reivindicación 10, en el que:
la información de control almacenada en la unidad (31A) de almacenamiento incluye una intervalo de velocidades de ángulo de dirección (SA2) aplicable cuando el vehículo está en un estado de conducción en recta; y
la unidad (31) de salida de órdenes de ajuste está dispuesta para emitir una orden de ajuste para generar una primera fuerza de amortiguación cuando la velocidad del vehículo calculada y la velocidad de ángulo de dirección pertenecen a un área fuera del intervalo de velocidades de ángulo de dirección (SA2) , y para emitir una orden de ajuste para generar una segunda fuerza de amortiguación menor que la primera fuerza de amortiguación cuando la velocidad del vehículo calculada y la velocidad de ángulo de dirección pertenecen a un área dentro del intervalo de velocidades de ángulo de dirección (SA2) .
12. Vehículo (1) de tipo para montar a horcajadas que tiene una sistema de amortiguador de dirección, comprendiendo el vehículo (1) :
un detector (15) de velocidad del vehículo dispuesto para detectar la velocidad del vehículo;
un detector (14) de ángulo de dirección dispuesto para detectar el ángulo de dirección;
un amortiguador (20) dispuesto para generar una fuerza de amortiguación de dirección;
una unidad (31A) de almacenamiento dispuesta para almacenar información de control en la que áreas para determinar una cantidad de ajuste de la fuerza de amortiguación se dividen por una intervalo de ángulos de dirección según la velocidad del vehículo, en el que el intervalo de ángulos de dirección se hace más estrecho a medida que aumenta la velocidad del vehículo;
una unidad (31) de salida de órdenes de ajuste dispuesta para emitir una orden de ajuste de fuerza de amortiguación basándose en la información de control almacenada en la unidad (31A) de almacenamiento según una de las áreas a la que pertenecen la velocidad del vehículo detectada por el detector de velocidad del vehículo y el ángulo de dirección detectado por el detector ángulo de dirección;
una unidad (32) de salida de órdenes de fuerza de amortiguación dispuesta para emitir una orden de fuerza de amortiguación al amortiguador (20) según la orden de ajuste de fuerza de amortiguación; y
un accionador (33) de amortiguador dispuesto para accionar el amortiguador (20) y para ajustar la fuerza de amortiguación basándose en la orden de fuerza de amortiguación.
13. Vehículo de tipo para montar a horcajadas según la reivindicación 12, que comprende además:
una unidad (31A) de cálculo de velocidad de ángulo de dirección dispuesta para calcular la velocidad de ángulo de dirección basándose en el ángulo de dirección detectado por el detector (14) ángulo de dirección;
en el que:
la unidad (31A) de almacenamiento está dispuesta para almacenar información de control en la que áreas para determinar una cantidad de ajuste de la fuerza de amortiguación se dividen por una intervalo de velocidades de ángulo de dirección según la velocidad del vehículo, volviéndose el intervalo de velocidades de ángulo de dirección más estrecho a medida que aumenta la velocidad del vehículo;
la unidad (31) de salida de órdenes de ajuste está dispuesta, usando la información de control almacenada en la unidad (31A) de almacenamiento, para emitir una orden de ajuste de fuerza de amortiguación según una de las áreas a la que pertenecen la velocidad del vehículo detectada por el detector de velocidad del vehículo y la velocidad de ángulo de dirección calculada.
Patentes similares o relacionadas:
 Sistema de graduación de amortiguación con anillo de obturación perpendicular, del 29 de Abril de 2020, de Kendrion (Villingen) GmbH: Sistema de graduación de amortiguación , que presenta
- un tubo de guía dispuesto en una carcasa exterior con una pared exterior lateral , cuyo espacio […]
Sistema de graduación de amortiguación con anillo de obturación perpendicular, del 29 de Abril de 2020, de Kendrion (Villingen) GmbH: Sistema de graduación de amortiguación , que presenta
- un tubo de guía dispuesto en una carcasa exterior con una pared exterior lateral , cuyo espacio […]
Electroválvula, del 30 de Octubre de 2019, de KYB Corporation: Electroválvula (V), que comprende: una válvula principal (M) que tiene un asiento de válvula dispuesto en un conducto de flujo principal , […]
Electroválvula, del 16 de Octubre de 2019, de KYB Corporation: Electroválvula (V2) que comprende: un asiento de válvula dispuesto en un conducto de flujo principal ; un cuerpo de válvula principal […]
SISTEMA DE AMORTIGUACIÓN AJUSTABLE PARA VEHÍCULOS, del 11 de Octubre de 2019, de TEJERO DAMAS, Victor Manuel: 1. Sistema de amortiguación ajustable para vehículos caracterizado porque está configurado a partir de un amortiguador ajustable formado por un resorte , de tal manera […]
Válvula de amortiguación, del 21 de Agosto de 2019, de KYB Corporation: Válvula de amortiguación (V1, V2, V3) que comprende: un elemento de asiento de válvula que tiene un puerto (1a) y un primer asiento […]
Válvula de amortiguación, del 21 de Agosto de 2019, de KYB Corporation: Válvula de amortiguación (V) que comprende: un elemento de asiento de válvula provisto de un puerto (1a); un cuerpo de válvula que abre o cierra el puerto […]
Válvula electromagnética para el control del flujo de un medio a presión, del 7 de Agosto de 2019, de Kendrion (Villingen) GmbH: Válvula electromagnética para el control del flujo de un medio a presión, que comprende - una carcasa de válvula con una abertura de alimentación […]
Amortiguador hidráulico de vibraciones, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Amortiguador hidráulico de vibraciones que comprende: un recipiente , un tubo interior , que está dispuesto en el recipiente , un […]