Aparato para control de motor fuera de borda.
Un aparato para controlar un motor fuera de borda (10) montado sobre una popa de un bote (12) y que tiene un motor de combustión interna (30) para proveer un propulsor (60),
un eje de transmisión (42) que conecta el motor y el propulsor, y un convertidor de torque (44) que este interpuesto entre el motor y el eje de transmisión y está equipado
con un embrague de traba (44d), en donde el aparato comprende:
un detector de velocidad de rotación de entrada (86, 94, S26) que detecta la velocidad de rotación de entrada (NIN) del convertidor del torque;
un detector de velocidad de rotación de salida (90, 94, S26) que detecta la velocidad de rotación de salida (NOUT) del convertidor de torque; caracterizado porque el aparato incluye adicionalmente:
un calculador de la relación de velocidad (94, S28) que calcula una relación de velocidad (e) del convertidor de torque con base en la velocidad de rotación de entrada detectada y la velocidad de rotación de salida detectada;
un calculador de la cantidad de cambio de velocidad de rotación de entrada (94, S32) que calcula una cantidad de cambio (DNIN) de la velocidad de rotación de entrada; un primer determinador (94, S30) que compara la relación de velocidad con un valor de referencia (eref) y determina si la relación de velocidad es igual a o mayor que el valor de
referencia; un segundo determinador (94, S34) que compara la cantidad de cambio de la velocidad de rotación de entrada con un valor prescrito (DNINref) y determina si la cantidad de cambio es igual a o menor que el valor prescrito,
y una unidad de embrague ACTIVADA/DESACTIVADA (94, S30, S34, S36) que ACTIVA y DESACTIVA el embrague de traba con base en la relación de velocidad calculada y a la cantidad de cambio calculada de la velocidad de rotación deentrada, en donde la unidad de embrague de ACTIVACIÓN/DESACTIVACIÓN ACTIVA el embrague de traba cuando la
relación de velocidad es igual a o mayor que el valor de referencia y la cantidad de cambio es igual a o menor que el valor descrito (S36) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09173206.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, MINAMI-AOYAMA 2-CHOME MINATO-KU TOKYO 107-8556 JAPON.
Inventor/es: MATSUDA, YOSHIYUKI, KURIYAGAWA,KOJI, YOSHIMURA,HAJIME, IKEDA,HIKARU.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H23/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 23/00 Transmisión de la energía desde la planta o grupo motriz de propulsión a los elementos propulsores (adaptación de la transmisión permitiendo la regulación en posición o en dirección de hélices B63H 5/125; transmisión entre motores de viento y elementos de propulsión B63H 13/00, en unidades de propulsión fuera borda B63H 20/14; adaptación de la transmisión que permita el reglaje de las hélices B63H 20/08). › estando esencialmente vertical el elemento principal de transmisión, p. ej. el eje.
- B63H23/30 B63H 23/00 […] › caracterizada por el empleo de embragues.
- F16H45/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 45/00 Combinaciones de transmisiones por fluido para transmitir un movimiento rotativo con acoplamiento o embragues (sistemas de engranajes que constan de una pluralidad de unidades hidrocinéticas que funcionan alternativamente F16H 41/22). › con embragues mecánicos para cortocircuitar una transmisión de fluido del tipo hidrocinético (control de los embragues de bloqueo del convertidor del par F16H 61/14).
- F16H61/14 F16H […] › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › Control de los embragues de bloqueo del convertidor del par.
PDF original: ES-2390639_T3.pdf
Fragmento de la descripción:
Aparato para control de motor fuera de borda
Antecedentes de la invención
Campo de la invención
Está invención se relaciona con un aparato para control de motor fuera de borda, particularmente con un aparato para controlar un motor fuera de borda que tiene un convertidor de torque.
Descripción de la técnica relacionada
En años recientes, se ha propuesto un motor fuera de borda que tiene un convertidor de torque interpuesto entre un motor de combustión interna y un eje de transmisión para amplificar el torque de salida del motor y luego transmitirlo al
eje de transmisión para potenciar el rendimiento de la aceleración, etc., como lo revela, por ejemplo, la solicitud de patente abierta japonesa No. 2007-315498 (`498) . En esta técnica convencional, el convertidor de torque incluye un embrague de traba.
Sin embargo, en el motor de borda que tiene el convertidor de torque como en la referencia, si bien el uso del convertidor de torque mejora el rendimiento de la aceleración, no puede adquirirse velocidad suficiente después de
terminar la aceleración (después de que se completa la amplificación del torque a través del convertidor de torques) debido al deslizamiento del convertidor del torque, de manera desventajosa. Este efecto puede tratarse activando prontamente el embrague de traba (esto, enganchado) después de completar la aceleración para evitar el deslizamiento del convertidor de torque, pero la referencia no divulga ninguna técnica concerniente a ello.
El documento de la técnica anterior más cercano US 5754969 divulga un sistema de transmisión automático que tiene
un embrague de traba dispuesto entre un árbol de salida de un motor y un árbol de entrada para una transmisión automática. El sistema comprende adicionalmente dispositivos para medir la variación del dominio de tiempo de la velocidad rotacional del árbol de salida y para cambiar la condición del embrague de traba cuando la variación del dominio del tiempo excede un valor umbral.
Resumen de la invención
Un objeto de esta invención por lo tanto es superar la desventaja anterior proveyendo un aparato para controlar un motor fuera de borda que tiene un convertidor de torque, aparato que apropiadamente ACTIVA/DESACTIVA el embrague de traba después de completar la aceleración, mejorando por lo tanto el rendimiento de velocidad.
De acuerdo con un primer aspecto de la presente invención se provee un aparato para controlar un motor fuera de borda montado sobre una roda de un bote y que tiene un motor de combustión interna para alimentar un propulsor, y un 30 convertidor de torque que se interpone entre el motor y el eje de transmisión y está equipado con un embrague de traba, en donde el aparato comprende un detector de la velocidad de rotación de entrada que detecta la velocidad de rotación de entrada del convertidor de torque, un detector de velocidad de rotación de salida que detecta la velocidad de rotación de salida del convertidor de torque; caracterizado porque el aparato incluye adicionalmente un calculador de la relación de velocidad que calcula una relación de velocidad del convertidor de torque con base en la velocidad de rotación de 35 entrada detectada y la velocidad de rotación de salida detectada, un calculador de la cantidad de cambio de velocidad de rotación de entrada que calcula una cantidad de cambio de la velocidad de rotación de entrada, un primer determinador que compara la relación de velocidad con un valor de referencia y determina si la velocidad es igual a o mayor que el valor de referencia, un segundo determinador que compara la cantidad de cambio de la velocidad de rotación de entrada con un valor prescrito y determina si la cantidad de cambio es igual a o menor que el valor prescrito,
y una unidad de embrague ACTIVADA/DESACTIVADA que hace que el embrague de traba ACTIVADO y DESACTIVADO con base en la relación de velocidad calculada y de la cantidad de cambio calculado de la velocidad de rotación de entrada, donde la unidad de embrague ACTIVADA/DESACTIVADA ACTIVA el embrague de traba cuando la relación de velocidad es igual a o mayor que el valor de referencia y la cantidad de cambio es igual a o menor que el valor prescrito.
45 De acuerdo con un segundo aspecto de la presente invención se provee un método para controlar un motor fuera de borda montado sobre un marco de un bote y que tiene un motor de combustión interna para alimentar un propulsor un eje de transmisión que conecta el motor y el propulsor, y un convertidor de torque que se interpone entre el motor y el eje de transmisión y está equipado con un embrague de traba, en donde el método comprende la etapas de detectar la velocidad de rotación de entrada del convertidor de torque; detectar la velocidad de rotación de salida de convertidor de
50 torque; caracterizado porque el método incluye las etapas de calcular una relación de velocidad del convertidor de torque con base en la velocidad de rotación de entrada detectada y la velocidad de rotación de salida detectada; comparar la relación de velocidad con un valor de referencia para determinar si la relación de velocidad es igual a o mayor que el valor de referencia; calcular una cantidad de cambio de la velocidad de rotación de entrada; comparar la cantidad de cambio de la velocidad de rotación de entrada con un valor prescrito para determinar si la cantidad de
55 cambio es igual o menor que el valor prescrito, y ACTIVAR y DESACTIVAR el embrague de traba con base en la relación de velocidad calculada y la cantidad de cambio calculada de la velocidad de rotación de entrada, y ACTIVAR el embrague de traba cuando la relación de velocidad es igual o mayor que el valor de referencia y la cantidad de cambio es igual a o menor que el valor prescrito.
Breve descripción de los dibujos
Los objetivos anteriores y otros y ventajas de la invención serán más evidentes a partir de la siguiente descripción y dibujos en los cuales:
La figura 1 es una vista esquemática global de un aparato de control de un motor fuera de borda que incluye un bote 5 (casco) de acuerdo con una primera realización de la invención;
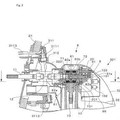
La figura 2 es una vista lateral seccional que muestra parcialmente el motor fuera de borda de la figura 1;
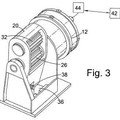
La figura 3 es una vista lateral alargada del motor fuera de borda mostrado en la figura 1;
La figura 4 es una vista en sección alargada que muestra una región alrededor de un convertido de torque mostrado en la figura 2;
La figura 5 es un diagrama de circuito hidráulico que muestra esquemáticamente el convertidor de torque, una bomba hidráulica y otros componentes mostrados en la figura 2;
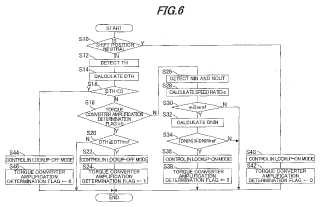
La figura 6 es un diagrama de flujo que muestra el control del estado de ACTIVADO/DESACTIVADO de un embrague de traba del convertidor de torque, entre las operaciones de un ECU en el aparato mostrado en la figura 1, etc.;
La figura 7 es un diagrama de flujo similar a la figura 6, pero que muestra el control del estado
ACTIVADO/DESACTIVADO del embrague de traba del convertidor de torque y la operación de regulación del ángulo de asentamiento, entre las operaciones del ECU en un aparato de control de motor fuera de borda de acuerdo con una segunda realización de la invención;
La figura 8 es un conjunto de vistas explicativas para explicar el proceso del diagrama de flujo de la figura 7; y
La figura 9 es un diagrama de flujo similar a la figura 6, pero que muestra el control del estado de
20 ACTIVACIÓN/DESACTIVACIÓN del embrague de traba del convertidor de torque, entre las operaciones del ECU en un aparato de control para un motor fuera de borda de acuerdo con una tercera realización de la invención.
Descripción detallada de las realizaciones preferidas
Las realizaciones preferidas de un aparato de control de motor fuera de borda de acuerdo con la invención se explicarán ahora con referencia a los dibujos anexos.
La figura 1 es una vista esquemática global de un aparato de control de motor fuera de borda y que incluye un bote (casco) de acuerdo con una primera realización de la invención. La figura 2 es una vista lateral en sección que muestra parcialmente el motor fuera de borda mostrado en la figura 1 y la figura 3 es una vista... [Seguir leyendo]
Reivindicaciones:
1. Un aparato para controlar un motor fuera de borda (10) montado sobre una popa de un bote (12) y que tiene un motor de combustión interna (30) para proveer un propulsor (60) , un eje de transmisión (42) que conecta el motor y el propulsor, y un convertidor de torque (44) que este interpuesto entre el motor y el eje de transmisión y está equipado
con un embrague de traba (44d) , en donde el aparato comprende:
un detector de velocidad de rotación de entrada (86, 94, S26) que detecta la velocidad de rotación de entrada (NIN) del convertidor del torque;
un detector de velocidad de rotación de salida (90, 94, S26) que detecta la velocidad de rotación de salida (NOUT) del convertidor de torque; caracterizado porque el aparato incluye adicionalmente:
un calculador de la relación de velocidad (94, S28) que calcula una relación de velocidad (e) del convertidor de torque con base en la velocidad de rotación de entrada detectada y la velocidad de rotación de salida detectada;
un calculador de la cantidad de cambio de velocidad de rotación de entrada (94, S32) que calcula una cantidad de cambio (DNIN) de la velocidad de rotación de entrada; un primer determinador (94, S30) que compara la relación de velocidad con un valor de referencia (eref) y determina si la relación de velocidad es igual a o mayor que el valor de
referencia; un segundo determinador (94, S34) que compara la cantidad de cambio de la velocidad de rotación de entrada con un valor prescrito (DNINref) y determina si la cantidad de cambio es igual a o menor que el valor prescrito,
y una unidad de embrague ACTIVADA/DESACTIVADA (94, S30, S34, S36) que ACTIVA y DESACTIVA el embrague de traba con base en la relación de velocidad calculada y a la cantidad de cambio calculada de la velocidad de rotación deentrada, en donde la unidad de embrague de ACTIVACIÓN/DESACTIVACIÓN ACTIVA el embrague de traba cuando la
relación de velocidad es igual a o mayor que el valor de referencia y la cantidad de cambio es igual a o menor que el valor descrito (S36) .
2. El aparato de acuerdo con la reivindicación 1, en donde el valor de referencia es un valor que permite determinar si se ha terminado un rango de amplificación de torque (S30) .
3. El aparato de acuerdo con la reivindicación 1 o 2, en donde el valor prescrito es un valor que permite determinar si la 25 velocidad del bote permanece estable en un valor máximo o cercano (S34) .
4. El aparato de acuerdo con cualquiera de las reivindicaciones 1 a 3, que incluye adicionalmente:
un determinador de la condición de desaceleración (94, S16) que determina si el motor está en una condición de desaceleración,
y la unidad de embrague de ACTIVACIÓN/DESACTIVACIÓN que DESACTIVA el embrague de traba cuando el motor 30 está en la condición de aceleración (S44) .
5. El aparato de acuerdo con la reivindicación 4, que incluye adicionalmente:
un calculador de la cantidad de cambio de abertura de regulador (80, 94, S14) que calcula una cantidad de cambio (DTH) de la abertura del regulador (TH) de una válvula reguladora (38) del motor,
y el determinador de condición de desaceleración determina que el motor está en la condición de desaceleración 35 cuando la cantidad de cambio de la abertura de regulación es un valor negativo (S16) .
6. El aparato de acuerdo con la reivindicación 1, que incluye adicionalmente:
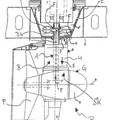
un regulador del ángulo de asentamiento (26) que regula un ángulo de asentamiento (Strm) con respecto al bote; y
un operador del regulador del ángulo de asentamiento (94, S29a, S29b) que opera el regulador del ángulo de asentamiento para regular el ángulo de asentamiento hasta un ángulo predeterminado (Strm1) cuando la relación de
velocidad es igual a o mayor que el valor de referencia de regulación del ángulo de asentamiento (erefl) , y la unidad de embrague de ACTIVACIÓN/DESACTIVACIÓN ACTIVA el embrague de traba después de que el ángulo de asentamiento es regulado hasta el ángulo predeterminado (S36) .
7. El aparato de acuerdo con la reivindicación 6, en donde el ángulo predeterminado es un valor que permite posicionar
una línea de eje (56a) de un árbol propulsor (56) conectado al propulsor sustancialmente en paralelo con una dirección 45 de desplazamiento del bote (S29b) .
8. El aparato de acuerdo con la reivindicación 6 o 7, en donde el valor de referencia de regulación del ángulo de asentamiento es un valor que permite determinar si esta inmediatamente antes de que se termine un rango de amplificación de torque (S29a) .
9. El aparato de acuerdo con cualquiera de las reivindicaciones 6 a 8, en donde la unidad de embrague de
50 ACTIVACIÓN/DESACTIVACIÓN ACTIVA el embrague de traba cuando la relación de velocidad es igual a o mayor que un valor de referencia (eref) definido mayor que el valor de referencia de regulación del ángulo de asentamiento y la cantidad de cambio de la velocidad de rotación de entrada es igual a o menor que el valor prescrito (DNINref) (S30, S34, S36) .
10. El aparato de acuerdo con la reivindicación 9, en donde el valor de referencia es un valor que permite determinar si se ha terminado un rango de amplificación de torque (S30) .
11. El aparato de acuerdo con la reivindicación 9 o 10, en donde el valor prescrito es un valor que permite determinar si la velocidad del bote permanece estable en un valor máximo o cercano (S34) .
12. El aparato de acuerdo con cualquiera de las reivindicaciones 6 a 11, que incluye adicionalmente:
un determinador de la condición de aceleración (94, S20) que determina si el motor está en condición de aceleración,
y el operador del regulador de ángulo de asentamiento opera el regulador del ángulo de asentamiento para regular el ángulo de asentamiento hasta el ángulo predeterminado cuando se determina que el motor está en la condición de aceleración (S29b) .
13. El aparato de acuerdo con la reivindicación 12 que incluye adicionalmente:
un calculador de la cantidad de cambio de la abertura de regulador (116, 94, S14) que calcula una cantidad de cambio (DTH) de la abertura del regulador (TH) de una válvula reguladora (38) del motor,
y el determinador de condición de aceleración determina que el motor está en la condición de aceleración cuando la cantidad de cambio de la abertura de regulación es igual a o mayor que un valor predeterminado de regulación (DTHref) 15 (S20) .
14. El aparato de acuerdo con cualquiera de las reivindicaciones 6 a 13 que incluye adicionalmente: un conmutador (114) instalado para ser manipulado manualmente por un operador, y el operador del regulador de ángulo de asentamiento opera el regulador de ángulo de asentamiento por manipulación
del conmutador (S29a) .
15. El aparato de acuerdo con cualquiera de las reivindicaciones 1 a 14, que incluya adicionalmente: un calculador de la cantidad de cambio de velocidad de rotación de salida (94, S39c) que calcula una cantidad de cambio (DNOUT) de la velocidad de rotación de salida cuando el embrague de traba se ACTIVA, y la unidad de embrague de ACTIVACIÓN/DESACTIVACIÓN DESACTIVA el embrague de traba cuando la cantidad de
cambio de la velocidad de rotación de salida es igual a o mayor que un segundo valor prescrito (DNOUTref) (S39d, 25 S39e) .
16. El aparato de acuerdo con la reivindicación 15, en donde el segundo valor prescrito es un valor que permite determinar si ha ocurrido un cambio de carga abrupto debido a contacto del propulsor con un obstáculo (S39d) .
17. Un método para controlar un motor fuera de borda (10) montado sobre una popa de un bote (12) y que tiene un motor de combustión interna (30) para alimentar un propulsor (60) , un eje de transmisión (42) que conecta al motor y al
propulsor, y un convertidor de torque (44) que se interpone entre el motor y el eje de transmisión y está equipado con un embrague de traba (44d) , en donde el método comprende las etapas de:
detecta la velocidad de rotación de entrada (NIN) del convertidor de torque (S26) ;
detectar la velocidad de rotación de salida (NOUT) del convertidor de torque (S26) ; caracterizado porque el método incluye adicionalmente las etapas de:
calcular una relación de velocidad (e) del convertidor de torque con base en la velocidad de rotación de entrada detectada y en la velocidad de rotación de salida detectada (S28) ;
comparar la relación de velocidad con un valor de referencia (eref) para determinar si la relación de velocidad es igual a
o mayor que el valor de referencia (S30) ;
calcular una cantidad de cambio (DNIN) de la velocidad de rotación de entrada (S32) ;
comparar la cantidad de cambio de la velocidad de rotación de entrada con un valor prescrito (DNINref) para determinar si la cantidad de cambio es igual a o menor que el valor prescrito (S34) , y hacer que el embrague de traba se ACTIVE y se DESACTIVE con base en la relación de velocidad calculada y la cantidad de cambio calculada de la velocidad de rotación de entrada (S30, S34, S36) y ACTIVAR el embrague de traba cuando la relación de velocidad es igual a o mayor que el valor de referencia y la cantidad de cambio es igual a o menor que el valor prescrito (S36) .
45 18. El método de acuerdo con la reivindicación 17, en donde el valor de referencia es un valor que permite determinar si ha terminado un rango de amplificación de torque (S30) .
19. El método de acuerdo con la reivindicación 17 o 18, en donde el valor prescrito es un valor que permite determinar si la velocidad del bote permanece estable en un valor máximo o cercano (S34) .
20. El método de acuerdo con la reivindicación 17 a 19, que incluye adicionalmente una etapa de:
50 determinar si el motor está en una condición de desaceleración (S16) , y la etapa de DESACTIVAR el embrague de traba cuando el motor está en una condición de aceleración (S44) .
21. El método de acuerdo con la reivindicación 20, que incluye adicionalmente una etapa de: calcular una cantidad de cambio (DTH) de abertura de regulación (TH) de una válvula reguladora (38) del motor (S14) , y la etapa de determinar que el motor está en la condición de desaceleración cuando la cantidad de cambio de la
abertura de regulación es un valor negativo (S16) .
22. El método de acuerdo con la reivindicación 17, que incluye un regulador del ángulo de asentamiento (26) que regula un ángulo de asentamiento (Strm) con respecto al bote,
e incluye adicionalmente una etapa de:
operar la etapa de regulación para regular el ángulo de asentamiento hasta un ángulo predeterminado cuando la relación de velocidad es igual a o mayor que un valor de referencia de regulación del ángulo de asentamiento (S29a, 10 S29b) ,
y la etapa de hacer que el embrague de traba se ACTIVE después de que el ángulo de asentamiento se regula hasta el ángulo predeterminado (S36) .
23. El método de acuerdo con la reivindicación 22, en donde el ángulo predeterminado es un valor que permite
posicionar una línea de eje de un árbol propulsor conectado al propulsor sustancialmente paralelo con una dirección de 15 desplazamiento del bote (S29b) .
24. El método de acuerdo con la reivindicación 22 o 23, en donde el valor de referencia de regulación del ángulo de asentamiento es un valor que permite determinar si está inmediatamente antes de que se termine un rango de amplificación de torque (S29a) .
25. El método de acuerdo con cualquiera de las reivindicaciones 22 a 24, en donde la etapa de hacer que el embrague
de traba se ACTIVE cuando la relación de velocidad es igual a o mayor que un valor de referencia (eref) definido mayor que el valor de referencia de regulación del ángulo de asentamiento y la cantidad de cambio de la velocidad de rotación de entrada es igual a o menor que un valor prescrito (DNINref) (S30, S34, S36) .
26. El método de acuerdo con la reivindicación 25, donde el valor de referencia es un valor que permite determinar si se ha terminado un rango de amplificación de torque (S30) .
27. El método de acuerdo con la reivindicación 25 0 26, donde el valor prescrito es un valor que permite determinar si la velocidad del bote permanece estable en un valor máximo o cercano (S34) .
28. El método de acuerdo con cualquiera de las reivindicaciones 22 a 27. Que incluye adicionalmente una etapa de: determinar si el motor está en la condición de desaceleración (S20) , y la etapa de operación opera el regulador del ángulo de asentamiento para regular el ángulo de asentamiento hasta el
ángulo predeterminado cuando se determina que el motor está en la condición de aceleración (S29b) .
29. El método de acuerdo con la reivindicación 28, que incluye adicionalmente una etapa de:
calcular una cantidad de cambio (DTH) de la abertura de regulación (TH) de una válvula reguladora (38) del motor (S14) ,
y la etapa de determinación determina que el motor está en la condición de aceleración cuando la cantidad de cambio 35 de la abertura de regulación es igual a o mayor que un valor predeterminado de regulación (DTHref) (S20) .
30. El método de acuerdo con cualquiera de las reivindicaciones 22 a 29, que incluye un conmutador (114) instalado para ser manipulado manualmente por un operador,
y la etapa de operación opera el regulador de ángulo de asentamiento por manipulación del conmutador (S29a) .
31. El método de acuerdo con cualquiera de las reivindicaciones 17 a 30, que incluye adicionalmente una etapa de:
calcular una cantidad de cambio (DNOUT) de la velocidad de rotación de salida cuando el embrague de traba está ACTIVADO (S39c) ,
y la etapa de hacer que el embrague de traba se desactive cuando la cantidad de cambio de la velocidad de rotación de salida es igual o mayor que un segundo valor prescrito (DNOUTref) (S39d, S39e) .
32. El método de acuerdo con la reivindicación 31, en donde el segundo valor prescrito es un valor que permite 45 determinar si ha ocurrido un cambio abrupto de carga debido al contacto del propulsor con un obstáculo (S39d) .
Patentes similares o relacionadas:
Carenado, elemento alargado carenado y conjunto de remolque, del 25 de Marzo de 2020, de THALES: Elemento alargado carenado destinado a estar al menos parcialmente sumergido que comprende un objeto alargado y un carenado, comprendiendo el carenado una pluralidad […]
Transmisión, del 14 de Febrero de 2018, de REINTRIEB GmbH: Transmisión , en particular para un vehículo acuático , con por lo menos un primer árbol dispuesto de manera giratoria en un primer cojinete , […]
Sistema de propulsión para vehículos acuáticos, del 4 de Enero de 2017, de EAGLEBURGMANN GERMANY GMBH & CO. KG: Vehículo acuático con un sistema de propulsión , que comprende: - una hélice , - un accionamiento para el accionamiento de […]
 Unidad fuera borda para embarcaciones, del 6 de Junio de 2013, de YANMAR CO., LTD: Unidad fuera borda montada en el exterior de una embarcación, que comprende:
una hélice para propulsión;
un embrague hidráulico que controla el accionamiento […]
Unidad fuera borda para embarcaciones, del 6 de Junio de 2013, de YANMAR CO., LTD: Unidad fuera borda montada en el exterior de una embarcación, que comprende:
una hélice para propulsión;
un embrague hidráulico que controla el accionamiento […]
 Dispositivo y método para rotar un árbol, del 12 de Junio de 2012, de MACTAGGART SCOTT (HOLDINGS) LTD.: Dispositivo de giro para hacer rotar un árbol comprendiendo este dispositivo: un ensamblaje de tracción rotatorio adaptado para fijarse sobre el casco […]
Dispositivo y método para rotar un árbol, del 12 de Junio de 2012, de MACTAGGART SCOTT (HOLDINGS) LTD.: Dispositivo de giro para hacer rotar un árbol comprendiendo este dispositivo: un ensamblaje de tracción rotatorio adaptado para fijarse sobre el casco […]
 Dispositivo de accionamiento por hélice direccional y procedimiento para el mismo, del 7 de Junio de 2012, de SCHOTTEL GMBH: Dispositivo de accionamiento por hélice direccional (R) con un motor de propulsión cuyo eje de salida puede ponerse en conexión de trabajo […]
Dispositivo de accionamiento por hélice direccional y procedimiento para el mismo, del 7 de Junio de 2012, de SCHOTTEL GMBH: Dispositivo de accionamiento por hélice direccional (R) con un motor de propulsión cuyo eje de salida puede ponerse en conexión de trabajo […]
Embrague modulable de transmisión de potencia y una transmisión marina, del 28 de Marzo de 2012, de TWIN DISC, INCORPORATED: Un cárter de transmisión de potencia (H) que tiene un embrague modulable (F,R) para transmisión de potencia montado en el mismo y que incluye platos de embrague […]
ACOPLAMIENTO PARA UN SISTEMA DE PROPULSIÓN, del 13 de Enero de 2012, de MARINVEST ENGINEERING AB: Un acoplamiento para un sistema de propulsión de barco para su disposición entre una primera sección de árbol y una segunda sección de árbol de un árbol de hélice, […]