ROBOT PARALELO.
Dispositivo de desplazamiento en las tres dimensiones del espacio del tipo paralelo que comprende al menos tres brazos (2) pivotantes cada uno alrededor de un eje (3) de pivotamiento guiado en rotación sobre al menos un cojinete (7),
siendo accionado cada uno de los brazos por un accionador (4), y estando cada uno de estos brazos, además, unido a una cabeza (5) que forma una base pequeña por medio de elementos de unión (6) articulados respectivamente sobre la cabeza (5) y sobre el brazo (2) de dos grados de libertad, guardando siempre la cabeza su orientación y su inclinación cuando se desplaza en un plano, estando dichos ejes (3) de pivotamiento en un plano paralelo al plano de desplazamiento de la cabeza o inclinados con relación a tal plano, estando este dispositivo de desplazamiento caracterizado porque los ejes (3) de pivotamiento definen un punto de intersección común o que los cojinetes (7) de pivotamiento de los brazos están montados totalmente en el exterior del polígono delimitado por las intersecciones dos a dos de los ejes de pivotamiento o de sus salientes sobre el plano de los cojinetes (7)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07350006.
Solicitante: MAREL FOOD SYSTEMS HF.
Nacionalidad solicitante: Islandia.
Dirección: AUSTURHRAUNI 9 210 GARDABER ISLANDIA.
Inventor/es: CHENU,JEAN-MARIE.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Mayo de 2007.
Fecha Concesión Europea: 28 de Julio de 2010.
Clasificación Internacional de Patentes:
- B25J17/02F2
Clasificación PCT:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Robot paralelo.
El invento se refiere a un dispositivo de desplazamiento de un objeto en el espacio.
Para desplazar un objeto en el espacio, se conocen brazos manipuladores cuyas articulaciones están montadas en serie y aquellos cuyas articulaciones están montadas en paralelo. Estos brazos son aún llamados robots.
Los robots del tipo de articulaciones en serie presentan el inconveniente de ser relativamente pesados y tienen por lo tanto una inercia importante que les impide trabajar con grandes cadencias.
Los robots llamados paralelos permiten desplazamientos mucho más rápidos pero la amplitud de los movimientos está restringida.
El invento se refiere a un robot llamado paralelo.
Se conoce precisamente tal robot por el documento EP-A-250 470 que comprende tres accionadores que contienen una parte fija y una parte móvil que tiene un solo grado de libertad con relación a la parte fija, estando unida cada parte móvil a una cabeza móvil por elementos de unión.
El dispositivo forma una especie de pirámide deformable de bases triangulares.
Cada accionador es un motor eléctrico cuyo eje de rotación está acoplado a un brazo (parte móvil) que pivota alrededor del eje de rotación del accionador.
Los ejes de pivotes de los brazos forman un triángulo y los elementos de unión están articulados respectivamente a una cabeza (base pequeña) y a la parte móvil correspondiente.
Las articulaciones de estos elementos de unión tanto sobre el brazo como sobre la cabeza son de dos grados de libertad.
Así, la orientación y la inclinación de la cabeza permanecen sin cambios en el espacio.
Un aprehensor de transmisión telescópica está montado en el centro del sistema.
Un soporte central lleva los accionadores. Este soporte central tiene sensiblemente las dimensiones definidas por los tres ejes de pivotamiento.
Los apoyos de rotación de los brazos que pivotan están a caballo entre los ejes de pivotamiento e inscritos cada uno en su mitad en la superficie definida por los ejes de pivotamiento de los brazos.
Los brazos son, al menos en su parte terminal, radiales y se extienden hacia el exterior del soporte central. La amplitud de desplazamiento es minimizada por la extensión del soporte que debe tener un tamaño suficiente para llevar los accionadores y a menudo un cuarto brazo que forma un aprehensor que une la base grande a la base pequeña. La amplitud de movimiento está unida a la longitud útil del brazo.
El volumen está definido por el círculo que pasa por las extremidades de los brazos cuando el sistema está en posición neutra, los brazos están entonces en un mismo plano, aquí horizontal.
Se comprende que cuanto mayor es la dimensión del soporte para un volumen dado, más será reducida la longitud de los brazos. Así para un volumen de aproximadamente 550 milímetros de radio, la longitud del brazo es de 350 milímetros, la altura de trabajo es así del orden de 300 a 350 milímetros.
Para aumentar la longitud de los brazos, para un volumen dado, es necesario reducir el tamaño del soporte pero este depende del tamaño de los accionadores y en las configuraciones conocida no puede ser muy reducido.
Se puede en efecto aumentar el volumen pero esto plantea igualmente problemas de implantación.
El documento EP-A-1 129 829, sobre el que reposa el preámbulo de la reivindicación 1, muestra un perfeccionamiento de este tipo de dispositivo aportado al montaje del aprehensor de transmisión telescópica montado en el centro del sistema para aumentar la amplitud de desplazamiento de la transmisión. Este perfeccionamiento impone aumentar el tamaño del triángulo para liberar una abertura más grande para el aprehensor.
Se conocen sistemas de desplazamientos esféricos y orientados de una cabeza por los documentos WO 2004/106011, US2005/0159075 o US5847528 que permiten la orientación de dicha cabeza. La problemática es diferente. No tiene en cuenta la cadencia y la amplitud del movimiento de estas máquinas cuyo objetivo es aprehender un objeto depositado sobre un plano, desplazarle muy rápidamente hacia otro plano, cambiando eventualmente su orientación por el movimiento del aprehensor en paralelo a su desplazamiento, luego volver a coger otro objeto (coger y colocar).
El invento propone un dispositivo que aporta una mayor amplitud de trabajo principalmente en el movimiento horizontal de los brazos.
A este efecto, el invento se refiere a un dispositivo de desplazamiento según la reivindicación 1. Las puestas en práctica del invento están definidas en las reivindicaciones dependientes.
El invento será bien comprendido con la lectura de la descripción siguiente hecha a título de ejemplo no limitativo con referencia al dibujo que representa:
Fig. 1: Estado de la técnica en vista desde arriba simplificada.
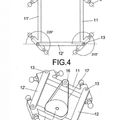
Fig. 2 a Fig. 4: El invento en vista desde arriba simplificada siendo radiales los ejes de los pivotes.
Fig. 5 a Fig. 7: El invento en vistas desde arriba simplificadas formando un triángulo los ejes de los pivotes.
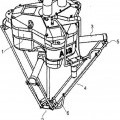
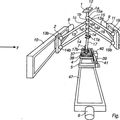
Fig. 8: Vista en perspectiva del invento.
Fig. 9: Vista en perspectiva de una variante del invento.
Fig. 10: Vista superior de un robot con brazos rectos.
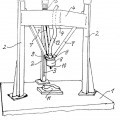
Fig. 11A: Vista de frente de un ejemplo de robot.
Fig. 11B: Corte según AA de la fig. 11A.
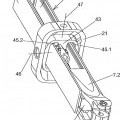
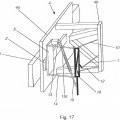
Fig. 12A: Vista de frente de un robot con un aprehensor.
Fig. 12B: Vista de un detalle.
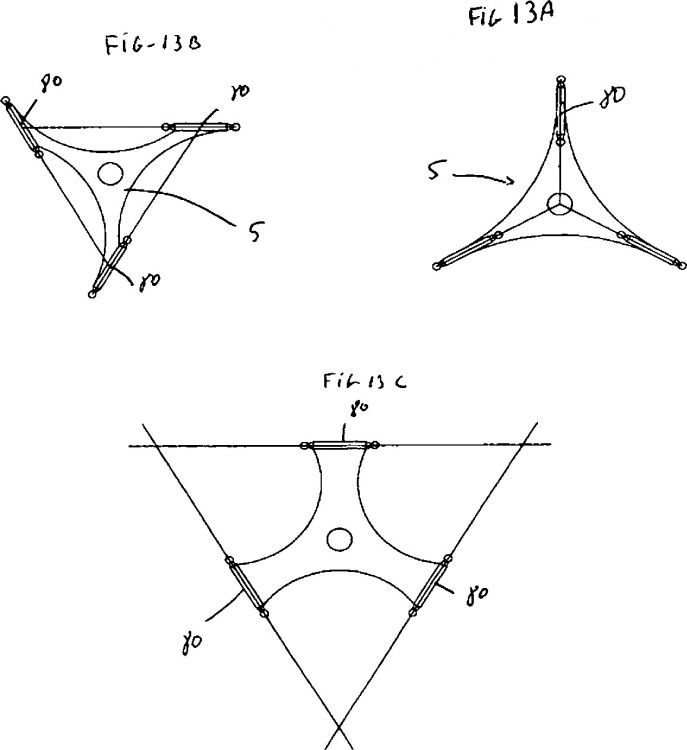
Figs. 13A, 13B, 13C: Diferentes cabezas.
Con referencia a la fig. 8, se ve un dispositivo 1 de desplazamiento de objetos del tipo paralelo.
Este dispositivo permite desplazar objetos con una cadencia elevada.
Clásicamente, el dispositivo comprende al menos tres brazos 2 pivotantes cada uno alrededor de un eje 3 de pivotamiento, estando dichos ejes de pivotamiento en un mismo plano aquí horizontal.
Un accionador 4 aplica al menos indirectamente una de las dos extremidades de cada brazo pivotante, estando además unido cada uno de estos brazos 2 a una cabeza 5 por medio de elementos de unión 6 articulados respectivamente sobre la cabeza y sobre los brazos. Estas articulaciones son de dos grados de libertad.
El dispositivo de desplazamiento del tipo paralelo forma una especie de pirámide truncada deformable de bases triangulares (para tres ejes de pivotamiento) que comprenden al menos tres brazos 2 pivotantes cada uno alrededor de un eje 3 de pivotamiento guiado en rotación sobre al menos un cojinete 7, siendo accionado cada uno de los brazos por un accionador 4, estando eventualmente dichos ejes de pivotamiento en un mismo plano llamado A de la base grande y estando cada uno de estos brazos, además, unido a una cabeza 5 que forma una base pequeña por medio de elementos de unión 6 articulados respectivamente sobre la cabeza y sobre el brazo de dos grados de libertad, guardando siempre la cabeza su orientación y su inclinación cuando la cabeza se desplaza en un plano. La cabeza no se desplaza según movimientos esféricos.
Con la excepción de la fig. 9, los ejes de pivotamiento están en un mismo plano.
Para la fig. 9, los ejes de pivotamiento están inclinados hacia abajo en dirección del centro. Podrían estar inclinados hacia arriba en dirección del centro.
Para las figs. 1 a 7 se han representado únicamente los brazos y los cojinetes de pivotamiento.
Relanzando hacia el exterior los pivotes de articulación de los brazos y conformando los brazos y los elementos de unión como si estos brazos tuvieran una longitud útil próxima a la distancia entre el centro de la base grande y la extremidad del brazo sobre la que se articula el elemento de unión, se va a permitir aumentar la longitud operacional de los brazos. En la posición que se llamará neutra, la cabeza se encuentra en la vertical de la base grande y la fuerza que es ejercida sobre esta cabeza por un brazo prolongado de su elemento de unión se ejerce en un plano radial a la cabeza.
En los dibujos de las figs. 8 y 9, se han representado los elementos de unión en forma de segmentos rectilíneos con una extremidad de los brazos en un plano radial medio en los puntos de anclaje de los elementos de...
Reivindicaciones:
1. Dispositivo de desplazamiento en las tres dimensiones del espacio del tipo paralelo que comprende al menos tres brazos (2) pivotantes cada uno alrededor de un eje (3) de pivotamiento guiado en rotación sobre al menos un cojinete (7), siendo accionado cada uno de los brazos por un accionador (4), y estando cada uno de estos brazos, además, unido a una cabeza (5) que forma una base pequeña por medio de elementos de unión (6) articulados respectivamente sobre la cabeza (5) y sobre el brazo (2) de dos grados de libertad, guardando siempre la cabeza su orientación y su inclinación cuando se desplaza en un plano, estando dichos ejes (3) de pivotamiento en un plano paralelo al plano de desplazamiento de la cabeza o inclinados con relación a tal plano, estando este dispositivo de desplazamiento caracterizado porque los ejes (3) de pivotamiento definen un punto de intersección común o que los cojinetes (7) de pivotamiento de los brazos están montados totalmente en el exterior del polígono delimitado por las intersecciones dos a dos de los ejes de pivotamiento o de sus salientes sobre el plano de los cojinetes (7).
2. Dispositivo de desplazamiento según la reivindicación 1, caracterizado porque los brazos tienen una forma de L.
3. Dispositivo de desplazamiento según la reivindicación 2, caracterizado porque los brazos tienen una forma de L truncada.
4. Dispositivo de desplazamiento según la reivindicación 1, caracterizado porque los brazos tienen una forma curva.
5. Dispositivo de desplazamiento según una cualquiera de las reivindicaciones precedentes, caracterizado porque comprende un aprehensor de transmisión telescópica.
6. Dispositivo de desplazamiento según la reivindicación 5, caracterizado porque una conexión coaxial lleva la potencia y el mando del aprehensor a través de un brazo.
7. Dispositivo de desplazamiento según la reivindicación 5, que comprende para el aprehensor, una articulación alta, una transmisión telescópica, una articulación baja caracterizado porque el plano A que contiene los brazos cuando están horizontales está situado entre la articulación alta y la cabeza.
8. Dispositivo de desplazamiento según una cualquiera de las reivindicaciones 1 a 7, caracterizado porque comprende un aprehensor fijado sobre la cabeza (5) por una articulación (50) mientras que su parte alta desliza libremente en un medio de guiado (51) orientable.
Patentes similares o relacionadas:
ROBOT PARALELO, del 18 de Agosto de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende: una base ; un brazo […]
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
 ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
 ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]