ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD.
Este robot paralelo comprende cuatro cadenas cinemáticas (1) artculadas por uno de sus extremos a una plataforma móvil (4) que prta la herramienta (5) y por su otro extremo,
a través de una juta de rotación (2), a un actuador solidario de una placa base (3. La plataforma móvil (4) está constituida por cuatro elementos 11), (11''), (12), (12''), unidos entre sí mediante uniones articuadas (13), siendo al menos dos de los elementos paralelos entre í, constituyendo una plataforma móvil articulada con un grado delibertad en el plano de la plataforma móvil. Los actuadores está posicionados con cualquier orientación en la placa base (2) y peferentemente a 45°, 135°, 225° y 315°
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2006/000053.
Solicitante: FUNDACION TECNALIA RESEARCH & INNOVATION.
Nacionalidad solicitante: España.
Provincia: VIZCAYA.
Inventor/es: BUENO ZABALO,RICARDO, PIERROT,FRANCOIS, RODRIGUEZ MIJANGOS,MARIA DE LA O, AZCOITIA ARTECHE,JOSE MIGUEL, COMPANY,OLIVIER, NABAT,VINCENT, FLORENTINO PEREZ DE ARMENTIA,KARMELE.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Febrero de 2006.
Fecha Concesión Europea: 13 de Octubre de 2010.
Clasificación Internacional de Patentes:
- B25J17/02F2
Clasificación PCT:
- B23Q1/54 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › con sólo dos pares de rotación.
- B25J17/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
OBJETIVO DE LA INVENCIÓN
El objetivo del robot de la invención es desplazar una plataforma que lleva la correspondiente herramienta, con cuatro grados de libertad (tres traslaciones y una rotación alrededor del eje vertical), con muy altas aceleraciones y velocidades en cualquier dirección. 5
Otro objetivo de la invención es que los actuadores del robot estén dispuestos simétricamente, lo que permite funcionamiento homogéneo y alta rigidez en la totalidad del volumen de trabajo.
Este robot está indicado especialmente para tareas de recogida y ubicación.
ANTECEDENTES DE LA INVENCIÓN
Los robots paralelos están constituidos generalmente por un soporte fijo o placa base sobre la que 10 hay actuadores ensamblados que, a través de brazos articulados o cadenas cinemáticas, se unen a una plataforma móvil a la que está anclada la correspondiente herramienta.
Un robot de este tipo con tres grados de libertad es describe, por ejemplo, en la patente de EE. UU. 4,976,582, mientras que la patente europea EP 1 084 802 describe un robot paralelo con cuatro grados de libertad (tres traslaciones y una rotación). 15
Los robots paralelos con cuatro grados de libertad son muy adecuados para realizar tareas de manipulación, empaquetado y ensamblaje parciales, y tienen ventajas sobre robots paralelos más complejos, por ejemplo, con 6 grados de libertad, en cuanto a simplicidad, precio y velocidad de movimientos.
El objetivo de la patente europea 1 084 802 es un robot paralelo en el que todas juntas de la plataforma móvil son conexiones de tipo articulación, siendo este un factor favorable para alcanzar altas 20 velocidades y aceleraciones. Este robot comprende cuatro cadenas cinemáticas operadas por medio de cuatro actuadores que están fijos en uno de sus extremos y con orientación específica hacia la placa base, y en si otro extreme hacia la cadena cinemática. A su vez, las cadenas cinemáticas están unidas a la plataforma móvil que lleva la herramienta, estando constituida la plataforma móvil por dos partes o barras que están unidas en sus extremos a las cuatro cadenas cinemáticas y una tercera barra que está ensamblada entre las dos 25 primeras, a través de dos conexiones articuladas, siendo esta barra la que lleva la herramienta.
La plataforma móvil permite una rotación de ± 45º que se puede ampliar por medio de del uso de anillos dentados.
El diseño específico de la plataforma móvil y el uso de conexiones articuladas conducen a la obtención de una configuración isostática y fuerza una disposición no homogénea de las cadenas cinemáticas 30 y, por lo tanto, de los actuadores. Esta disposición especial de los actuadores combinada con la configuración isostática previene que el robot tenga un funcionamiento homogéneo y alta rigidez en la totalidad del volumen de trabajo, lo que es una desventaja muy importante.
Una configuración modificada del robot descrito en la patente EP 1 084 802 está descrita, por ejemplo, en la siguiente publicación: "14: Un nuevo mecanismo paralelo para movimientos de SCARA" Acta de IEEE 35 ICRA: Conferencia Internacional Sobre Robótica y Automatización, Taipei, Taiwan, Septiembre 14–19, 2003.
La configuración descrita en este artículo busca compensar la principal limitación de la patente EP 1084802.
Otra configuración se describe en el artículo siguiente: "Un Robot Paralelo de Alta Velocidad para Movimientos de Scara" Acta de la Conferencia Internacional del IEEE 2004 sobre Robótica y Automatización, 40 New Orleans, LA, USA, 26 Abril 26–Mayo 1, 2004.
Este robot está formado por cuatro cadenas cinemáticas, unidas a la plataforma móvil, operada por cuatro actuadores rotatorios, unidos a la base fija. Las diferencias principales comparada con la configuración antes descrita son el uso de actuadores rotatorios y el diseño de la plataforma móvil. Concretamente, la plataforma móvil está formada por dos partes unidas entre sí por medio de una guía prismática y un cable y 45 sistema de poleas que transforma el movimiento de traslación lineal de la guía en la rotación deseada. Este diseño de la plataforma móvil permite que los actuadores estén dispuestos a 90º entre sí, lo que implica un diseño simétrico y un funcionamiento homogéneo en la totalidad del volumen de trabajo.
El principal inconveniente de las dos últimas configuraciones descritas es la limitación para alcanzar altas aceleraciones y velocidades, el principal requisito para las aplicaciones de recogida y ubicación. Esta 50 limitación se debe al uso de guías prismáticas y más concretamente a la recirculación de bolas en las guías de rodamiento.
El documento WO–A–03/1 06115 se refiere a un robot industrial y a un procedimiento de manipulación de un robot industrial que comprende un manipulador cinemático paralelo.
DESCRIPCIÓN DE LA INVENCIÓN
El robot objetivo de la invención tiene las ventajas de los robots mencionados con cuatro grados de 5 libertad eliminando sus inconvenientes.
Específicamente, las ventajas principales del robot de la invención son alta rigidez, alta precisión, funcionamiento homogéneo en la totalidad del volumen de trabajo, buen rendimiento mecánico y muy altas velocidades y aceleraciones en cualquier dirección.
Estas propiedades se logran como consecuencia de la disposición simétrica de sus actuadores, del 10 uso de juntas articuladas en la plataforma móvil y de un nuevo diseño de la plataforma móvil.
Específicamente, la plataforma móvil del robot de la invención está constituida por cuatro partes unidas entre sí por medio de juntas articuladas, siendo cada una de dichas partes paralela a otra de dichas partes formando una plataforma móvil articulada paralelogramo plano que tiene un grado de libertad en dicho plano. 15
La herramienta de trabajo puede ser integral con cualquiera de las partes que constituyen la plataforma móvil.
Las cadenas cinemáticas están formadas por un paralelogramo especial constituido por cuatro barras, paralelas en pares, unidas por medio de rótulas.
Estas cadenas cinemáticas están unidas en uno de sus extremos a una de las conexiones articuladas 20 de la plataforma móvil y en su otro extremo, a través de una junta rotatorio o traslacional, a respectivos actuadores ensamblados sobre la placa base situada en la parte superior del, con la particularidad de que los actuadores están situados simétricamente en el plano de la placa base con cualquier orientación.
Los actuadores están situados simétricamente en una estructura fija, de manera tal que esta disposición simétrica de los actuadores y, especialmente, el uso de un paralelogramo plano en la plataforma 25 móvil permite obtener un excelente rendimiento dinámico, alta rigidez y funcionamiento homogéneo en la totalidad del volumen de trabajo.
Controlando los actuadores la plataforma móvil alterna con cuatro grados de libertad, tres traslaciones y una rotación en relación con el eje vertical.
El grado de libertad asociado al paralelogramo plano es una rotación en relación al eje vertical que 30 permite a la herramienta de trabajo una rotación entre –45° y +45°.
Se puede incluir otro mecanismo mecánico por medio de cinta, poleas o engranajes para incrementar el rango de rotación de la herramienta de trabajo. En este caso, la herramienta de trabajo será integral con cualquiera de las partes mecánicas complementarias necesaria.
DESCRIPCIÓN DE LOS DIBUJOS 35
Para complementar la presente descripción, y con el fin de ayudar a la mejor comprensión de las características de la invención, se adjunta un conjunto de dibujos como parte integral de dicha descripción que muestra, con un carácter ilustrativo y no limitativo, lo siguiente:
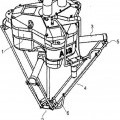
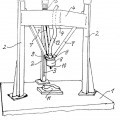
La figura 1 muestra una vista en perspectiva del robot objetivo de la invención.
La figura 2 muestra una vista en planta de un detalle de la plataforma móvil y de sus articulaciones a 40 las cadenas cinemáticas del robot.
La figura 3 muestra una vista en planta del robot objetivo de la invención.
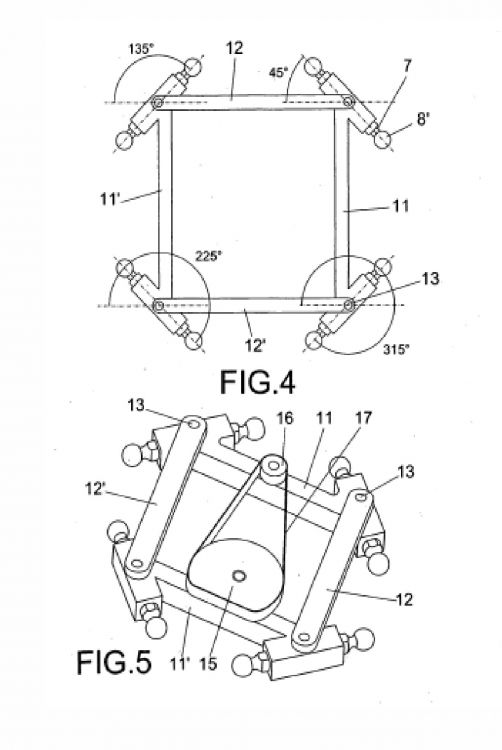
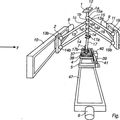
La figura 4 muestra una vista en planta de la plataforma móvil y de una realización preferente en cuanto a la ubicación de los actuadores.
La...
Reivindicaciones:
1. Un robot paralelo de alta velocidad con cuatro grados de libertad que comprende:
una placa (3) base;
una plataforma (4) móvil portadora de una herramienta (5);
cuatro actuadores, siendo cada uno de dichos actuadores integral con dicha placa (3) base; 5
cuatro cadenas (1) cinemáticas, estando articulada cada una de dichas cadenas (1) cinemáticas en uno de sus extremos a dicha plataforma (4) móvil y en su otro extremo, a través de una articulación (2) rotatoria, a un respectivo de dichos actuadores, caracterizado porque
la plataforma (4) móvil comprende cuatro miembros (11,11',12,12'),unidos entre sí por medio de conexiones (13) articuladas, 10
porque los miembros (11,11',12,12') están unidos entre sí a través de sus extremos, siendo cada uno de dichos miembros paralelo a otro de dichos miembros, de manera que dichos miembros forman un paralelogramo plano, formando dichos miembros una plataforma móvil articulada con un grado de libertad en el plano de la plataforma móvil; y porque
los actuadores están situados simétricamente en el plano de la placa (3) base. 15
2. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque el grado de libertad de la plataforma móvil es una rotación con respecto al eje vertical, con un rango de –45° a 45°.
3. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque los actuadores están situados sobre la placa (3) base a 45°, 135°, 225° y 315°. 20
4. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque los actuadores incluyen motores lineales dispuestos en el mismo plano y alineados en la misma dirección.
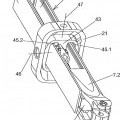
5. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque cada una de las cadenas (1) cinemáticas está constituida por cuatro barras (6, 25 6', 7, 7'), paralelas en pares, que están unidas entre sí por medio rótulas, que están unidas a la plataforma (4) móvil y a los actuadores, de manera tal que la barra (7') de unión para unión a la plataforma (4) móvil tiene la misma orientación que el correspondiente actuador.
6. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque algunas o todas sus cadenas (1) cinemáticas están formadas por medio de 30 una sola barra con dos juntas cardan o universales, que están unidas a la plataforma (4) móvil y a los actuadores.
7. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque la plataforma (4) móvil incorpora un mecanismo de ampliación para amplificar la rotación de la herramienta (5) de trabajo. 35
8. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 7, caracterizado porque el mecanismo de ampliación está constituido por dos poleas (15,16), una primera de dichas poleas (15) ensamblada en uno de los cuatro miembros de la plataforma (4) móvil, y una segunda de dichas poleas (16) unida a otro de los miembros de la plataforma móvil, y una cinta (17) dispuesta entre dichas poleas (15, 16), ensamblándose la herramienta (5) de trabajo sobre el eje 40 de la segunda de dichas poleas (16).
9. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, caracterizado porque la plataforma móvil comprende además un miembro (20) intermedio dispuesto entre dos de los miembros de la plataforma (4) móvil, por medio de conexiones articuladas, ensamblándose la herramienta (5) de trabajo sobre el miembro (20) intermedio. 45
10. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 9, caracterizado porque los miembros que forman la plataforma (4) móvil están dispuestos paralelos en pares y el miembro (20) intermedio está ensamblado paralelo a uno de los pares de brazos (12,12') que constituyen la plataforma móvil y está unido a los otros dos miembros (11,11 ') en su parte central. 50
11. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 10, caracterizado porque incorpora un mecanismo de ampliación para amplificar la rotación de la herramienta de trabajo.
12. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 11, 5 caracterizado porque el mecanismo de ampliación está constituido por dos poleas (21, 22), una primera de dichas poleas (21) ensamblada sobre uno de los cuatro miembros de la plataforma (4) móvil y una segunda de dichas poleas (22) unida al miembro (20) intermedio, y una cinta (23) dispuesta entre dichas poleas (21, 22), ensamblándose la herramienta (5) de trabajo sobre el eje de la segunda de dichas poleas (22). 10
13. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 11, caracterizado porque el mecanismo de ampliación está constituido por un sector (24) dentado dispuesto en uno de los miembros de la plataforma (4) móvil y una rueda (25) dentada dispuesta en el miembro (20) intermedio, uniéndose la herramienta (5) de trabajo a la rueda (25) dentada.
14. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 1, 15 caracterizado porque la plataforma (4) móvil comprende además dos miembros (20, 26) intermedios unidos a la plataforma (4) móvil por medio de conexiones articuladas.
15. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 14, caracterizado porque los miembros que forman la plataforma (4) móvil están dispuestos paralelos en tríos, con uno de los miembros (20) intermedios ensamblado paralelo a uno de los pares de brazos 20 (12,12') que forman la plataforma (4) móvil y unido a los otros dos miembros (11,11 ') en su parte central, mientras que el segundo miembro (26) intermedio está ensamblado paralelo al segundo par de brazos (11,11 ') de la plataforma (4) móvil y unido a los otros dos miembros (12,12') en su parte central; uniéndose los dos miembros (20, 26) intermedios en un punto (27) donde está situada la herramienta (5) de trabajo. 25
16. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 15, caracterizado porque la plataforma móvil incluye un miembro de ampliación para ampliar la rotación de la herramienta.
17. Un robot paralelo de alta velocidad con cuatro grados de libertad de acuerdo con la reivindicación 16, caracterizado porque el miembro de ampliación comprende una caja (28) de cambios ensamblada 30 en el punto (27) de unión de los miembros (20, 26) intermedios.
Patentes similares o relacionadas:
ROBOT PARALELO, del 18 de Agosto de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende: una base ; un brazo […]
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
 ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]