ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT.
Un robot industrial para el desplazamiento de un objeto en el espacio que comprende:
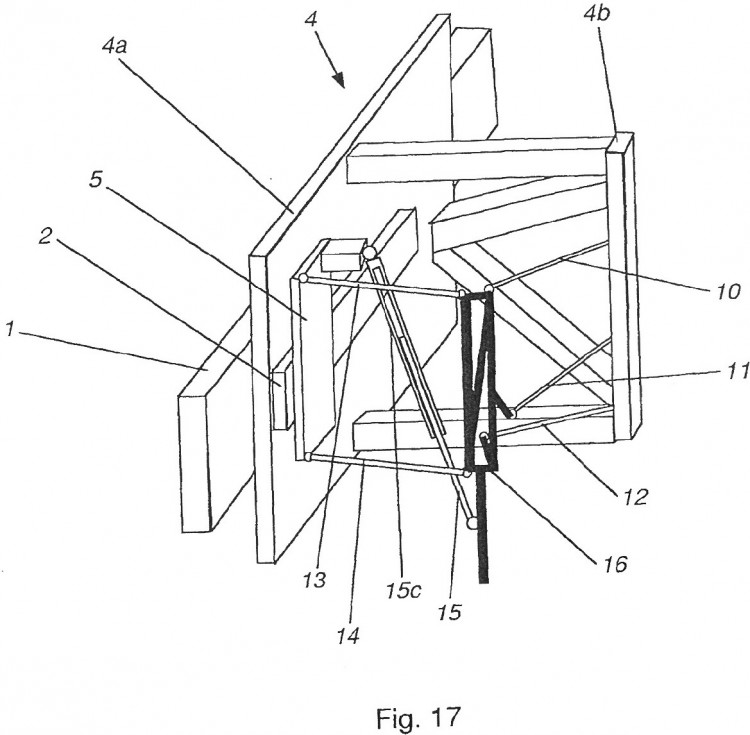
- una plataforma (16) dispuesta para acarrear el objeto, - un primer brazo (7) dispuesto para influenciar la plataforma en un primer desplazamiento, que comprende un primer accionador (1, 4) y tres tirantes (10, 11, 12), teniendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al primer accionador, - un segundo brazo (8) dispuesto para influenciar la plataforma en un segundo desplazamiento, que comprende un segundo accionador (2, 5) y dos tirantes (13, 14) teniendo cada tirante una junta externa conectada a la plataforma, y una junta interna conectada al segundo accionador, y - un tercer brazo (9) dispuesto para influenciar la plataforma en un tercer desplazamiento, que comprende un tirante (15) que tiene una junta externa (15b) conectada a la plataforma, caracterizado porque al menos uno de dichos tirantes (10, 11, 12, 13, 14, 15) está dispuesto con una longitud ajustable e incluye un accionador lineal (10c, 13c, 14c, 15c) para controlar la longitud del tirante
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/052571.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVÄGEN 2 721 83 VÄSTERÀS SUECIA.
Inventor/es: BROGARDH, TORGNY.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Junio de 2005.
Clasificación Internacional de Patentes:
- B23Q1/54B3
- B25J17/02F2
- B25J9/16K3
Clasificación PCT:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/16 B25J […] › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
PDF original: ES-2357655_T3.pdf
Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
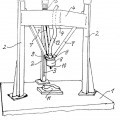
La presente invención se refiere a un robot industrial para desplazar un objeto en el espacio. El objeto es, por ejemplo, un utensilio o un objeto de trabajo. Dicho robot comprende un manipulador y un equipamiento de control para desplazar el objeto. El manipulador comprende un manipulador cinemático paralelo que incluye al menos tres brazos, comprendiendo cada uno una disposición de tirantes. El manipulador comprende una plataforma conjuntamente soportada por los tres brazos. Cada brazo está asociado con un accionador con la finalidad de desplazar los tirantes del brazo de tal manera que se consiga que la plataforma se desplace. La función de la plataforma es soportar directa o indirectamente los utensilios u objetos de funcionamiento, tanto grandes como pequeños, para su desplazamiento, medición tratamiento, trabajo, unión, etc. En particular, el manipulador está destinado a ser utilizado en la industria manufacturera pero, así mismo, también resulta aplicable en la transferencia de productos y en pasarelas para pasajeros en puertos y en aeropuertos.
TÉCNICA ANTERIOR
Un robot industrial incluye un manipulador y una unidad de control que incorpora unos medios para accionar el manipulador de forma automática. Hay diferentes tipos de manipuladores, como por ejemplo un manipulador cinemático en serie, un manipulador cinemático paralelo.
Un manipulador cinemático paralelo (PKM) se define como un manipulador que comprende al menos un elemento fijo, un elemento amovible designado como plataforma, y al menos dos brazos. Cada brazo comprende una disposición de tirantes conectada a la plataforma amovible. Cada brazo es accionado por un medio de arrastre dispuesto, de manera preferente, sobre el elemento fijo para reducir la masa móvil. Estas disposiciones de tirantes transfieren unas fuerzas hasta la plataforma amovible. Para un manipulador cinemático paralelo totalmente integrado para el desplazamiento de la plataforma con tres grados de libertad, por ejemplo, en las direcciones x, y, z un sistema de coordenadas cartesiano, se requieren tres brazos de trabajo paralelos. Para conseguir un sistema de brazos rígido con una gran capacidad de carga y de poco peso, los brazos del manipulador cinemático paralelo deben tener un total de seis tirantes. Esto significa que los brazos deben compartir los seis tirantes entre ellos, y esto solo puede llevarse a cabo con ciertas combinaciones.
Cuando se requiere un espacio de trabajo rectangular en aplicaciones de manipuladores, en la actualidad se utilizan los llamados los manipuladores de pórtico. Estos dispositivos manipulan una plataforma con normalmente tres grados de libertad: x, y, z. Estos manipuladores están compuestos por tres vías lineales conectadas en serie, sobre las cuales son desplazadas las unidades en las direcciones x-, y- y z.
La solicitud de patente internacional WO02/34480 divulga un robot industrial con una cinemática paralela que comprende una plataforma dispuesta para soportar un objeto, un primer brazo dispuesto para influenciar la plataforma en un primer emplazamiento y que comprende un primer accionador que presenta una primera vía y un primer carro linealmente amovible a lo largo de la primera vía y al menos dos tirantes, cada uno de los cuales comprende una junta externa dispuesta en la plataforma y una junta interna dispuesta en el primer carro, un segundo brazo dispuesto para influenciar la plataforma en un segundo desplazamiento y que comprende un segundo accionador, que comprende una segunda vía y un segundo carro linealmente amovible a lo largo de la segunda vía , y dos tirantes, cada uno de los cuales comprende una junta externa dispuesta en la plataforma y una junta interna dispuesta en el segundo carro, y un tercer brazo dispuesto para influenciar la plataforma en un tercer desplazamiento y que comprende un tercer accionador y al menos un tirante, el cual comprende una junta externa dispuesta en la plataforma y una junta interna conectada al tercer accionador. El brazo soporta un eje de rotación cuando el manipulador tiene cuatro grados de libertad. En este documento se divulga un robot en el cual los brazos comparten los seis tirantes entre ellos en unas combinaciones 3 / 2 / 1.
OBJETIVOS Y SUMARIO DE LA INVENCIÓN
El objetivo de la presente invención consiste en proporcionar un robot industrial mejorado que comprenda un manipulador cinemático paralelo.
De acuerdo con un aspecto de la invención este objetivo se consigue por medio de un robot industrial de acuerdo con lo definido en la reivindicación 1.
Al menos uno de los tirantes está dispuesto con una longitud ajustable e incluye un accionador lineal para el control de la longitud del tirante. El accionador lineal para el control de la longitud del tirante está adaptado para modificar la longitud axial del tirante en base a una señal de control procedente de la unidad de control del robot. Por el ejemplo, el accionador lineal es utilizado para el control de desplazamiento de la plataforma en la dirección x, y o z, o para la modulación del ángulo de inclinación de la plataforma para, de esta manera, incrementar el número de grados de libertad del robot. La incorporación de un accionador lineal que controla la longitud del tirante integrado en el tirante es particularmente útil en la aplicación por la que una acusada rigidez es más importante que una velocidad y aceleración elevadas. Ejemplos de dichas aplicaciones de robot son el taladro, el corte, el fresador y la molturación de materiales duros, como por ejemplo acero y hierro.
Si uno de los tirantes del manipulador es sustituido por un tirante con una longitud ajustable, se consiguen muchas posibilidades para el incremento de la rigidez del manipulador. Por ejemplo, si los grados de libertad exceden el número deseado, el grado de libertad suplementario obtenido puede ser utilizado para incrementar la rigidez del robot mediante el control de la configuración del robot, esto es, mediante la configuración de la estructura de los tirantes. A lo que se aspira es a tratar de potenciar al máximo la configuración de la estructura de tirantes con el fin de conseguir la mayor rigidez posible. Por ejemplo, el tirante es ajustado momentáneamente con el fin de incrementar la rigidez de la estructura de tirantes.
Una posibilidad conseguida para el incremento de la rigidez del manipulador es medir el esfuerzo de la vía provocado por la fuerza de los utensilios. Estos valores de los esfuerzos son utilizados para calcular el par de flexión sobre la vía lineal y las fuerzas axiales añadidas existentes en el tirante. Por medio de un modelo elastocinético de la vía lineal y del tirante, se calcula el ajuste necesario sobre la longitud del tirante con el fin de compensar los errores del TPC (Puente Central de la Herramienta) provocado por la elasticidad de la estructura del robot. La longitud del tirante es ajustada en base al ajuste calculado. Por medio de lo cual, es posible compensar no solo modificaciones de las fuerzas de baja frecuencia sino también fenómenos tales como la vibración durante el fresado o el bamboleo durante el taladrado.
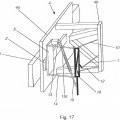
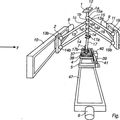
De acuerdo con una forma de realización de la invención, el tirante del tercer brazo está dispuesto con una longitud ajustable e incluye el accionador lineal para el control de la longitud del tirante. La incorporación al tirante del tercer brazo de un accionador para el control de la longitud del tirante hace posible el control de la inclinación del tirante con el fin de potenciar al máximo la rigidez del robot con respecto a las fuerzas del utensilio. Cuando se modifica la inclinación se ajusta la longitud del tirante dependiendo de la distancia entre la junta externa conectada a la plataforma y la junta interna conectada al accionador que desplaza el tirante. Para conseguir la mayor rigidez posible el ángulo entre el tirante y la vía lineal debe ser, de modo preferente, de aproximadamente 90º y el ángulo entre el tirante del tercer brazo y los tirantes de los otros brazos debe ser, de modo preferente, de aproximadamente 90º. De esta manera, esta forma de realización hace posible controlar los movimientos del tirante del tercer brazo de tal manera que el ángulo entre el tirante y la vía lineal se aproxime a los 90º, y / o el ángulo entre el tirante del tercer brazo y uno o más de los otros tirantes se aproxime a los 90º.
De acuerdo con una forma de realización de la invención al menos uno de los primero y segundo accionadores comprende una vía lineal y un carro linealmente amovible a lo largo de la vía y el tirante... [Seguir leyendo]
Reivindicaciones:
1. Un robot industrial para el desplazamiento de un objeto en el espacio que comprende:
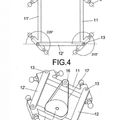
- una plataforma (16) dispuesta para acarrear el objeto,
- un primer brazo (7) dispuesto para influenciar la plataforma en un primer desplazamiento, que comprende un primer accionador (1, 4) y tres tirantes (10, 11, 12), teniendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al primer accionador,
- un segundo brazo (8) dispuesto para influenciar la plataforma en un segundo desplazamiento, que comprende un segundo accionador (2, 5) y dos tirantes (13, 14) teniendo cada tirante una junta externa conectada a la plataforma, y una junta interna conectada al segundo accionador, y
- un tercer brazo (9) dispuesto para influenciar la plataforma en un tercer desplazamiento, que comprende un tirante (15) que tiene una junta externa (15b) conectada a la plataforma, caracterizado porque al menos uno de dichos tirantes (10, 11, 12, 13, 14, 15) está dispuesto con una longitud ajustable e incluye un accionador lineal (10c, 13c, 14c, 15c) para controlar la longitud del tirante.
2. Un robot industrial de acuerdo con la reivindicación 1, en el que dicho tirante (15) del tercer brazo (9) es dicho tirante dispuesto con una longitud ajustable e incluye dicho accionador lineal (15c) para el control de la longitud del tirante (15).
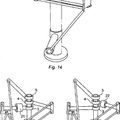
3. Un robot industrial de acuerdo con la reivindicación 2, en el que al menos uno de dichos primero y segundo accionadores comprende una vía (1, 2) y un carro (4, 5) que puede ser desplazado linealmente a lo largo de la vía, y dicho tirante (15) de dicho tercer brazo (9) comprende una junta interna (15a) conectada a dicho carro.
4. Un robot industrial de acuerdo con la reivindicación 2, en el que dicho primer accionador comprende una primera vía (1) y un primer carro (4) que puede ser desplazado linealmente a lo largo de la primera vía, y dichas juntas internas de dichos tres tirantes (10, 11, 12) están conectadas al primer carro, dicho segundo accionador comprende una segunda vía (2) y un segundo carro (5) que puede ser desplazado linealmente a lo largo de la segunda vía, y dichas juntas internas de dichos dos tirantes (13, 14) están conectadas al segundo carro, y dicho tercer brazo (9) comprende un tercer accionador que presenta una tercera vía (3) y un tercer carro (6) que puede ser desplazado linealmente a lo largo de la tercera vía, y dicho tirante (15) del tercer brazo (9) comprende una junta interna (15a) conectada al tercer carro.
5. Un robot industrial de acuerdo con cualquiera de las reivindicaciones 1 a 4, en el que al menos dos de dichos tirantes (10, 11, 12, 13, 14, 15) están dispuestos con unas longitudes ajustables e incluyen unos accionadores lineales (10, 13c, 14c, 15c) para el control de la longitud de los tirantes.
6. Un robot industrial de acuerdo con cualquiera de las reivindicaciones 1 a 5, en el que al menos uno de dichos tres tirantes (10, 11, 12) del primer brazo está dispuesto con una longitud ajustable e incluye un accionador lineal (10c) para el control de la longitud del tirante.
7. Un robot industrial de acuerdo con cualquiera de las reivindicaciones anteriores, en el que al menos uno de dichos dos tirantes (13, 14) del segundo brazo está dispuesto con una longitud ajustable e incluye un accionador lineal (13c, 14c) para el control de la longitud del tirante.
8. Un robot industrial de acuerdo con la reivindicación 2, en el que dicho primer accionador comprende una primera vía (1) y un primer carro (4) que puede ser desplazado linealmente a lo largo de la primera vía, y dichas juntas internas de dichos tres tirantes (10, 11, 12) están conectadas al primer carro, dicho segundo accionador comprende una segunda vía (2) y un segundo carro (5) que puede ser desplazado linealmente a lo largo de la segunda vía, y dichas juntas internas de dichos dos tirantes (13, 14) están conectadas al segundo carro, la segunda vía (2) está montada sobre el primer carro (4), y dicho tirante (15) del tercer brazo comprende una junta interna (15a) conectada al segundo carro (5).
9. Un procedimiento para el control de un robot industrial para el desplazamiento de un objeto en el espacio que comprende una plataforma (16) dispuesta para acarrear el objeto, un primer brazo (7) dispuesto para influenciar la plataforma en un primer desplazamiento, que comprende un primer accionador (1, 4) y tres tirantes (10, 11, 12), teniendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al primer accionador, un segundo brazo (8) dispuesto para influenciar la plataforma en un segundo desplazamiento, que comprende un segundo accionador (2, 5) y dos tirantes (13, 14), teniendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al segundo accionador, y un tercer brazo (9) dispuesto para influenciar la plataforma en un tercer desplazamiento, que comprende un tercer accionador que presenta una tercera vía (3) y un tercer carro (6) que puede ser desplazado linealmente a lo largo de la tercera vía, un tirante (15) que presenta una junta externa (15b) conectada a la plataforma y una junta interna (15a) conectada al tercer carro, y dicho un tirante (15) está
dispuesto con una longitud ajustable que incluye un accionador lineal (15c, 10c, 13c) para el control de la longitud del tirante, en el que el procedimiento comprende el control del desplazamiento del tercer carro (6) a lo largo de la tercera vía, para de esta forma controlar la inclinación de dicho tirante del tercer brazo con el fin de incrementar la rigidez del robot con respecto a las fuerzas de los utensilios, y ajustar la longitud del tirante (15) en base a la posición del tercer carro y a la posición deseada de la plataforma.
10. Un procedimiento de acuerdo con la reivindicación 9, en el que el procedimiento comprende la determinación del ángulo entre el tirante (15) del tercer brazo y al menos uno de los otros tirantes del robot y, sobre esta base, controlar el desplazamiento del tercer carro (6) a lo largo de la tercera vía con el fin de obtener un ángulo deseado que sea favorable con respecto a la rigidez del robot, entre el tirante (15) del tercer brazo y el otro tirante.
11. Un procedimiento de acuerdo con la reivindicación 9, en el que el procedimiento comprende la determinación del ángulo entre el tirante (15) del tercer brazo y la tercera vía, y sobre esta base, controlar el desplazamiento del tercer carro (6) a lo largo de la tercera vía con el fin de obtener un ángulo deseado, el cual es favorable con respecto a la rigidez del robot, entre el tirante (15) del tercer brazo y la otra vía.
12. Un procedimiento de acuerdo con las reivindicaciones 10 u 11, en el que dicho ángulo deseado es de 90º.
13. Un programa informático que puede ser cargado directamente dentro de la memoria interna de una computadora, que comprende un software para llevar a cabo las etapas de cualquiera de las reivindicaciones 9 a 12.
14. Un medio legible por computadora, que incorpora un programa registrado en él, en el que el programa consiste en hacer que una computadora lleve a cabo las etapas de cualquiera de las reivindicaciones 9 a 12, cuando dicho programa es ejecutado en la computadora.
15. Un robot industrial para el desplazamiento de un objeto en el espacio que comprende:
- una plataforma (16) dispuesta para acarrear el objeto,
- un primer brazo (80) dispuesto para influenciar la plataforma en un primer desplazamiento, que comprende una primera vía (1) y un primer carro (4) que puede ser desplazado linealmente a lo largo de una primera vía, y tres tirantes (10, 11, 12), comprendiendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al primer carro,
- un segundo brazo (81) dispuesto para influenciar la plataforma en un segundo desplazamiento, que comprende una segunda vía (2) y un segundo carro (5) que puede ser desplazado linealmente a lo largo de la segunda vía, y dos tirantes (13, 14) comprendiendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al segundo carro, y
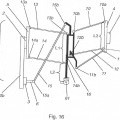
- un tercer brazo (82) dispuesto para influenciar la plataforma en un tercer desplazamiento, que comprende un tirante (15) que presenta una junta externa (15b) conectada a la plataforma y una junta interna (15a), caracterizado porque el tercer brazo (82) comprende un accionador lineal (63) conectado a uno de dichos primero y segundo carros (4, 5) y a dicha junta interna (15a) del tirante del tercer brazo, y el accionador lineal (63) está adaptado para desplazar linealmente el tirante (15) del tercer brazo con respecto al carro conectado (4, 5).
Patentes similares o relacionadas:
ROBOT PARALELO, del 18 de Agosto de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende: una base ; un brazo […]
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
 ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
 MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS, del 25 de Mayo de 2010, de ABB AB: Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres […]
MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS, del 25 de Mayo de 2010, de ABB AB: Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres […]