MÁQUINA DE CINEMÁTICA PARALELA.
Máquina (1) de cinemática paralela que incluye al menos tres dispositivos (4.
1, 4.2, 4.3) de ajuste que pueden alargarse y acortarse individualmente, en la que cada dispositivo (4.1, 4.2, 4.3) de ajuste está conectado a un cabezal (11) de posicionamiento común a través de una primera junta (8, 9, 10), en la que cada dispositivo (4.1, 4.2, 4.3) de ajuste está conectado a una base (2) a través de una junta (3.1, 3.2, 3.3) universal, y en la que el cabezal (11) de posicionamiento puede moverse dentro de un alcance de trabajo en respuesta a la manipulación de los dispositivos (4.1, 4.2, 4.3) de ajuste, caracterizada por al menos dos vigas (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo que están conectadas, cada una, al cabezal (11) de posicionamiento común a través de un respectivo apoyo (100.1, 100.2) rotacional de viga, teniendo, cada uno, únicamente un grado de libertad, en la que cada viga (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo está adaptada para deslizarse transversalmente en un apoyo (17.1, 17.2, 17.2.1, 17.2.2) de viga en la base (2) cuando uno o más de los dispositivos (4.1, 4.2, 4.3) de ajuste se alarga o se acorta, en la que cada apoyo (17.1, 17.2, 17.2.1, 17.2.2) de viga está conectado a la base (2) a través de una junta (BÜ1, BU2) universal de viga y en la que el apoyo (17.2, 17.2.1, 17.2.2) de viga de al menos una viga (5.2, 5.2.1, 5.2.2) de refuerzo puede hacerse rotar alrededor de un eje que se extiende en paralelo al eje longitudinal de dicha viga (5.2, 5.2.1, 5.2.2) de refuerzo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2005/001651.
Solicitante: EXECHON AB.
Nacionalidad solicitante: Suecia.
Dirección: ORRVÄGEN 26 19255 SOLLENTUNA SUECIA.
Inventor/es: NEUMANN, KARL-ERIK.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Noviembre de 2005.
Clasificación Internacional de Patentes:
- B23Q1/54B3
- B25J17/02F2
Clasificación PCT:
- B23Q1/26 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › caracterizados por particularidades estructurales relacionadas con la cooperación de elementos animados de un movimiento relativo; Medios para impedir el desplazamiento relativo de dichos órganos.
- B25J17/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2358240_T3.pdf
Fragmento de la descripción:
Máquina de cinemática paralela.
Campo técnico
La presente invención se refiere al campo de las máquinas herramienta y, particularmente entonces, a robots previstos para trabajar en la industria.
Antecedentes de la invención
La memoria descriptiva de la patente estadounidense U.S. 4.732.525 (correspondiente al documento SE 452279), en la que se basa el preámbulo de la reivindicación 1, enseña una máquina de cinemática paralela en forma de un robot de diseño convencional. El robot incluye tres dispositivos de ajuste, que pueden alargarse y acortarse, en combinación con un tubo central que lleva un cabezal de posicionamiento en un extremo del mismo. El tubo central también está montado para moverse en su dirección axial por medio de un apoyo central en forma de una junta universal, que proporciona tres grados de libertad en relación con la base de la máquina. Cada dispositivo de ajuste está conectado al cabezal de posicionamiento a través de una junta que proporciona tres grados de libertad y también a la base de la máquina a través de una junta que tiene dos grados de libertad, de modo que se posibilita que el cabezal de posicionamiento se mueva dentro de un alcance de trabajo limitado. Los dispositivos de ajuste absorben únicamente fuerzas de tensión y fuerzas de presión, mientras que el tubo central absorbe todas las fuerzas rotacionales y los esfuerzos de flexión procedentes de las cargas sobre el cabezal de posicionamiento.
La precisión de los movimientos de una máquina de este tipo depende en gran medida de su rigidez, que, a su vez, depende del número de apoyos/grados de libertad disponibles y también de la capacidad de los materiales componentes de minimizar esfuerzos de torsión y esfuerzos de flexión en direcciones críticas. Por ejemplo, puede mencionarse que grandes fuerzas laterales con respecto al cabezal de posicionamiento dan como resultado una tendencia del tubo central a doblarse y/o a rotar entre su apoyo giroscópico en la base de la máquina y su conexión con los dispositivos de ajuste.
La rigidez de la máquina convencional descrita depende por tanto, entre otras cosas, del diseño de la conexión de los dispositivos de ajuste con el cabezal de posicionamiento y también de la rigidez intrínseca del tubo central per se. Para mejorar la rigidez de una máquina convencional de este tipo es necesario, en primer lugar, aplicar tolerancias más estrictas a cada junta y, en segundo lugar, usar un tubo central más robusto, con lo que se añade un aumento de peso.
El tubo central puede hacerse más robusto, usando un material más rígido y/o aumentando el grosor del tubo y/o aumentando su diámetro.
Todas estas mejoras en la rigidez de la máquina, sin embargo, dan como resultado mayores costes, una máquina más pesada y una reducción en la zona de trabajo en la que puede manipularse el cabezal de posicionamiento.
También se conocen máquinas de cinemática paralela similares, por ejemplo, a partir de la solicitud de patente británica B319708 (2.143.498), estadounidense 4.569.627 y noruega 148216.
Sin embargo, ninguna de estas máquinas conocidas tiene una construcción básica que permita el nivel de rigidez y, por tanto, el nivel de precisión que buscan las máquinas modernas. El documento EP 1419851 también da a conocer una máquina similar.
Objeto de la invención
Un objeto de la presente invención es proporcionar una máquina de cinemática paralela cuya rigidez y, por tanto, su precisión deseada, sea mayor que la de las máquinas de cinemática paralela anteriormente conocidas, en combinación con una construcción simple que contribuya a costes de fabricación relativamente bajos.
Un objeto adicional es proporcionar una máquina de este tipo que carezca de tubo central, para mejorar así la movilidad del cabezal de posicionamiento en su alcance de trabajo y por tanto que contribuya también a conseguir una construcción simple y costes de fabricación relativamente bajos.
En conjunto, otro objeto es reducir la masa en movimiento de una máquina de este tipo.
Descripción de la invención
Estos objetos se consiguen por medio de la presente invención según se define en la reivindicación de patente independiente adjunta. Realizaciones adecuadas adicionales de la invención resultarán evidentes a partir de las reivindicaciones de patente dependientes adjuntas.
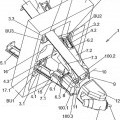
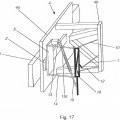
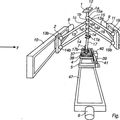
La invención se refiere a una máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente en sus direcciones longitudinales. Cada dispositivo de ajuste está conectado a un cabezal de posicionamiento a través de una primera junta y también a una base de la máquina a través de una junta universal apropiada, que puede tener la forma de un dispositivo giroscópico o un tornillo esférico. El cabezal de posicionamiento puede moverse de este modo dentro de un alcance de trabajo, manipulando los dispositivos de ajuste. Al menos dos vigas de refuerzo están conectadas al cabezal de posicionamiento, a través de un respectivo apoyo rotacional de viga, que tienen, cada uno, sólo un grado de libertad. Cada viga de refuerzo está dispuesta para deslizarse transversalmente en un apoyo de viga soportado en la base cuando uno o más de los dispositivos de ajuste se alargan o se acortan. Además, cada apoyo de viga está conectado a la base de la máquina a través de una junta universal de viga y el apoyo de viga de al menos una viga de refuerzo puede hacerse rotar alrededor de un eje que se extiende en paralelo al eje longitudinal de la viga de refuerzo.
Este concepto da lugar a varias realizaciones básicas factibles de la relación entre la base de la máquina, los dispositivos de ajuste, las vigas de refuerzo y el cabezal de posicionamiento con respecto a la relación mutua de estos componentes, por un lado, y los apoyos de los componentes en la base de la máquina y en el cabezal de posicionamiento, por otro lado, tal como resultará evidente a partir de la siguiente parte de la descripción realizada con referencia a la figura 6.
La realización detallada descrita más adelante incluye tres dispositivos de ajuste, cada uno de los cuales está conectado a su respectiva viga de refuerzo, estando el segundo dispositivo de ajuste dotado también de una viga de refuerzo adicional.
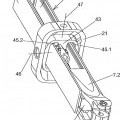
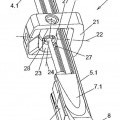
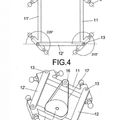
La junta universal incluye un elemento giroscópico externo que está montado en la base anteriormente mencionada para su rotación alrededor de un eje giroscópico externo, e incluye además un elemento giroscópico interno montado en dicho elemento giroscópico externo para su rotación alrededor de un eje giroscópico interno en ángulo recto respecto al eje giroscópico externo. En este caso, el apoyo de viga está conectado preferiblemente al elemento giroscópico interno de la junta universal. En el caso de otras realizaciones, el apoyo de viga puede ser independiente de la junta universal del dispositivo de ajuste, pero estar conectado a una junta universal propia distanciada de la junta universal del dispositivo de ajuste, lo que, sin embargo, requiere un apoyo rotacional de viga propio para la conexión de la viga de refuerzo al cabezal de posicionamiento.
Como resultará evidente a partir de la realización ilustrada, a la primera junta sólo se le da un grado de libertad, con lo cual se confiere a la máquina su rigidez al tiempo que se elimina la necesidad de un tubo central.
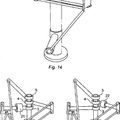
Cada viga de refuerzo está adaptada para presentar en una primera dirección una resistencia a la flexión que supera en gran medida su resistencia a la flexión en una dirección en ángulo recto respecto a la primera dirección. Esto permite que la viga de refuerzo tenga una forma de sección transversal generalmente rectangular o una forma de sección transversal elíptica. Se entenderá, sin embargo, que son concebibles otras formas de sección transversal dentro del alcance de la invención, tal como vigas en I, por ejemplo. La viga de refuerzo se fabricará preferiblemente de un material compuesto reforzado con fibras de carbono.
La máquina según la realización mostrada en detalle incluye tres dispositivos de ajuste, cada uno de los cuales está conectado de manera permanente a una viga de refuerzo en dicha primera junta. Uno de los dispositivos de ajuste también está dotado de una viga de refuerzo adicional con la intención de obtener generalmente la misma rigidez en todas las direcciones. Tal como se indicó anteriormente, es concebible dotar... [Seguir leyendo]
Reivindicaciones:
1. Máquina (1) de cinemática paralela que incluye al menos tres dispositivos (4.1, 4.2, 4.3) de ajuste que pueden alargarse y acortarse individualmente, en la que cada dispositivo (4.1, 4.2, 4.3) de ajuste está conectado a un cabezal (11) de posicionamiento común a través de una primera junta (8, 9, 10), en la que cada dispositivo (4.1, 4.2, 4.3) de ajuste está conectado a una base (2) a través de una junta (3.1, 3.2, 3.3) universal, y en la que el cabezal (11) de posicionamiento puede moverse dentro de un alcance de trabajo en respuesta a la manipulación de los dispositivos (4.1, 4.2, 4.3) de ajuste, caracterizada por al menos dos vigas (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo que están conectadas, cada una, al cabezal (11) de posicionamiento común a través de un respectivo apoyo (100.1, 100.2) rotacional de viga, teniendo, cada uno, únicamente un grado de libertad, en la que cada viga (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo está adaptada para deslizarse transversalmente en un apoyo (17.1, 17.2, 17.2.1, 17.2.2) de viga en la base (2) cuando uno o más de los dispositivos (4.1, 4.2, 4.3) de ajuste se alarga o se acorta, en la que cada apoyo (17.1, 17.2, 17.2.1, 17.2.2) de viga está conectado a la base (2) a través de una junta (BÜ1, BU2) universal de viga y en la que el apoyo (17.2, 17.2.1, 17.2.2) de viga de al menos una viga (5.2, 5.2.1, 5.2.2) de refuerzo puede hacerse rotar alrededor de un eje que se extiende en paralelo al eje longitudinal de dicha viga (5.2, 5.2.1, 5.2.2) de refuerzo.
2. Máquina de cinemática paralela según la reivindicación 1, caracterizada porque al menos un apoyo (100.1, 100.2) rotacional de viga consiste en la primera junta (8, 9, 10).
3. Máquina de cinemática paralela según la reivindicación 2, caracterizada porque al menos una junta (BU1, BU2) universal de viga comprende una de las juntas (3.1, 3.2, 3.3) universales.
4. Máquina de cinemática paralela según la reivindicación 1, caracterizada porque el apoyo (100.1, 100.2) rotacional de viga de al menos una viga (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo está rígidamente conectado a un dispositivo (4.1,4.2,4.3) de ajuste.
5. Máquina de cinemática paralela según la reivindicación 1, caracterizada porque la primera junta (8, 9, 10) de al menos un dispositivo (4.1, 4.2, 4.3) de ajuste está rígidamente conectado a una viga (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo.
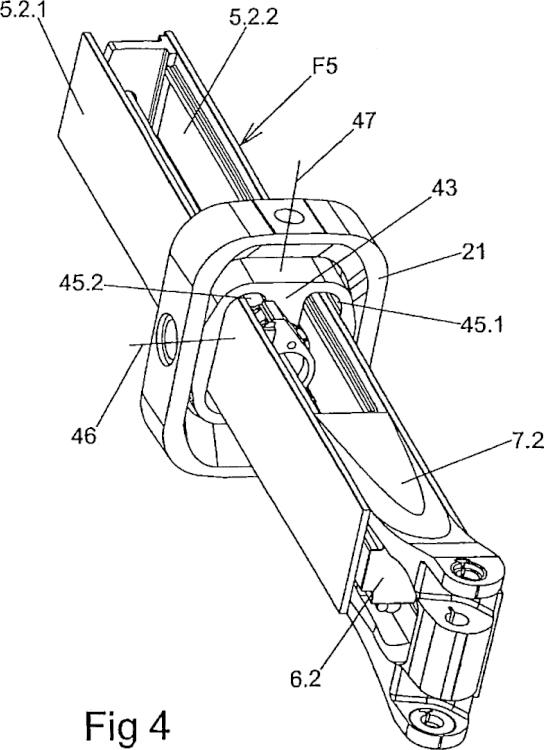
6. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 5, caracterizada porque tanto las juntas (3.1, 3.2, 3.3) universales como las juntas (BU1, BU2) universales de viga incluyen un elemento (21) giroscópico externo que está montado en la base (2) para su rotación alrededor de un eje (22, 47) giroscópico externo, y con un elemento (23, 43) giroscópico interno que está montado en el elemento (21) giroscópico externo para su rotación alrededor de un eje (24, 46) giroscópico interno en ángulo recto respecto al eje (22, 47) giroscópico externo.
7. Máquina de cinemática paralela según la reivindicación 6, caracterizada porque el apoyo (17.1, 17.2) de viga está conectado o bien al elemento (23, 43) giroscópico interno de la junta (3.1, 3.2, 3.3) universal o bien al elemento giroscópico interno de la junta (BU1, BU2) universal de viga.
8. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 7, caracterizada porque cada viga (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo tiene en una primera dirección una rigidez a la flexión que es considerablemente mayor que su rigidez a la flexión en una dirección en ángulo recto respecto a dicha primera dirección.
9. Máquina de cinemática paralela según la reivindicación 8, caracterizada porque cada viga (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo tiene una forma de sección transversal generalmente rectangular.
10. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 9, caracterizada porque la máquina incluye tres dispositivos (4:1, 4.2, 4.3) de ajuste, cada uno de los cuales está rígidamente conectado a una de las vigas (5.1, 5.2, 5.2.1, 5.2.2, 5.3) de refuerzo en la primera junta (8, 9, 10) en ausencia de cualquier junta o apoyo intermedio.
11. Máquina de cinemática paralela según cualquiera de las reivindicaciones 4 a 10, caracterizada porque uno de los dispositivos (4.2) de ajuste está rígidamente conectado a una viga (5.2.1, 5.2.2) de refuerzo adicional.
12. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 11, caracterizada porque al menos un dispositivo (4.1, 4.2, 4.3) de ajuste es en forma de mecanismo de tuerca y tornillo, cuyo tornillo o tuerca (28, 52) se conecta rígidamente al elemento (23, 43) giroscópico interno.
13. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 11, caracterizada porque al menos un dispositivo (4.1,4.2, 4.3) de ajuste es en forma de motor lineal.
14. Máquina de cinemática paralela según las reivindicaciones 13, caracterizada porque parte del motor lineal está constituido por una viga (5.1, 5.2, 5.2.1, 5.2,2, 5.3) de refuerzo.
15. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 14, caracterizada porque cada viga (5.1, 5.2, 5.2.1, 5.2.2, 5.3) de refuerzo incluye al menos un primer elemento (26, 57.2, 58.2) de deslizamiento que se extiende longitudinalmente, por ejemplo una barra de deslizamiento, que está conectada mediante su forma a un segundo elemento (27, 57.1, 58.1) de deslizamiento, por ejemplo un carril guía, estando conectado dicho segundo elemento (27, 57.1, 58.1) de deslizamiento al elemento (23, 43) giroscópico interno.
16. Máquina de cinemática paralela según la reivindicación 15, caracterizada porque el segundo elemento (27, 57.1, 58.1) de deslizamiento o bien está conectado de manera fija al elemento (23, 43) giroscópico interno o bien está guiado mediante su forma en relación con dicho elemento.
17. Máquina de cinemática paralela según cualquiera de las reivindicaciones 12 a 16 cuando dependen de la reivindicación 12, caracterizada porque o bien el tornillo (31, 51) de dicho mecanismo está adaptado para accionarse en un extremo mediante un motor (6.1, 6.2, 6.3) de dispositivo de ajuste, mientras que el otro extremo del tornillo está soportado por un apoyo (29) de soporte, o bien la tuerca (28, 52) de dicho mecanismo está adaptada para accionarse mediante un motor (6) de dispositivo de ajuste.
18. Máquina de cinemática paralela según la reivindicación 17, caracterizada porque el motor (6.1, 6.2, 6.3) de dispositivo de ajuste está montado en un soporte (7.1, 7.2, 7.3) de motor, del que un extremo está formado como una parte (8) de dicha primera junta (8, 9, 10) y que también está dotado de superficies (15) de conexión a las que está unida al menos una viga (5.1, 5.2.1, 5.2.2, 5.3) de refuerzo.
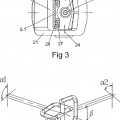
19. Máquina de cinemática paralela según cualquiera de las reivindicaciones 1 a 18, caracterizada porque los apoyos (100.1, 100.2) rotacionales de viga de al menos dos vigas (5.1, 5.2, 5.2.1, 5.2.2) de refuerzo tienen ejes de apoyo que están orientados en ángulo recto entre sí.
20. Máquina de cinemática paralela según cualquiera de las reivindicaciones 12 a 19, caracterizada porque los apoyos (100.1, 100.3) rotacionales de viga de al menos dos vigas (5.1, 5.3) de refuerzo tienen ejes de apoyo que están orientados en paralelo entre sí.
21. Máquina de cinemática paralela según cualquiera de las reivindicaciones 6 a 20, caracterizada porque los ejes (24, 46) giroscópicos internos de la junta (BU1, BU3) universal de viga de dos vigas (5.1, 5.3) de refuerzo son paralelos a los ejes de apoyo de los respectivos apoyos (100.1,100.3) rotacionales de viga.
22. Máquina de cinemática paralela según la reivindicación 21, caracterizada porque los ejes (24) giroscópicos internos de la junta (BU1, BU3) universal de viga de dos vigas (5.1, 5.3) de refuerzo son paralelos entre sí.
Patentes similares o relacionadas:
ROBOT PARALELO, del 18 de Agosto de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende: una base ; un brazo […]
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
 ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
 ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
 MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS, del 25 de Mayo de 2010, de ABB AB: Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres […]
MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS, del 25 de Mayo de 2010, de ABB AB: Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres […]