DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS.
Un dispositivo de robot industrial, incluyendo un montaje giratorio (7) con medios de montaje para el montaje de una herramienta,
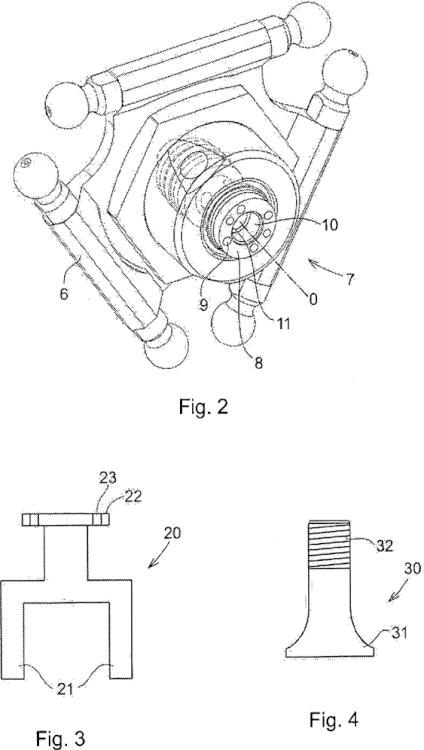
definiendo el dispositivo un eje (0) caracterizado porque los medios de montaje incluyen al menos dos dispositivos de montaje diferentes para dos tipos diferentes de herramientas, incluyendo un primero (8, 9) de dichos dispositivos de montaje medios de colocación (9) que definen una cierta posición angular de una herramienta montada (20) con relación al eje (0) y estando dispuesto un segundo (10) de dichos dispositivos de montaje para permitir una posición angular arbitraria de una herramienta montada (30) con relación al eje (0)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/060720.
Solicitante: ABB TECHNOLOGY AB.
Nacionalidad solicitante: Suecia.
Dirección: 721 83 VÄSTERAS SUECIA.
Inventor/es: FORS,MICHAEL, WAPPLING,DANIEL, FAVOT,Guido.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Octubre de 2007.
Clasificación Internacional de Patentes:
- B25J15/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
- B25J15/06V
- B25J17/02F2
Clasificación PCT:
- B25J15/00 B25J […] › Cabezas de aprehensión.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361129_T3.pdf
Fragmento de la descripción:
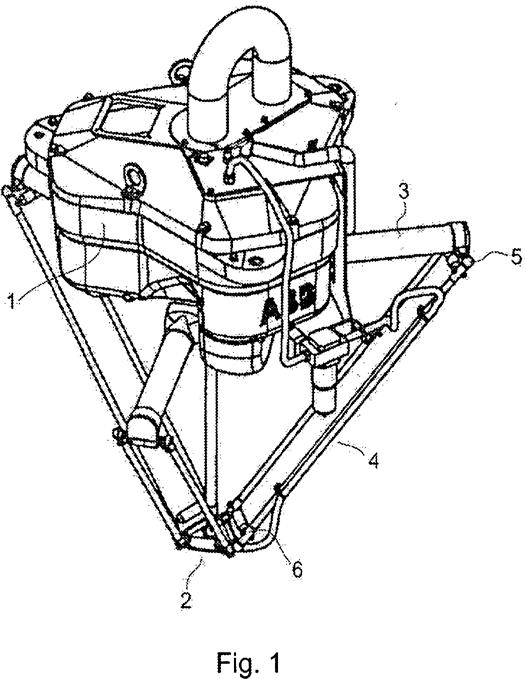
Campo de la invención 5 La presente invención se refiere a un dispositivo de robot industrial incluyendo medios de montaje para el montaje de una herramienta, a un robot industrial y a un método para manipular objetos. Antecedentes de la invención 10 Un robot industrial incluye un manipulador y equipo de control, por lo que el manipulador con la asistencia del equipo de control lleva a cabo operaciones arbitrarias dentro de un rango de trabajo. Generalmente, tal manipulador incluye una pluralidad de brazos que soportan una mano, en la que se dispone una herramienta. En la mayoría de las aplicaciones de robot se usa un manipulador de seis ejes tradicional, que exhibe suficiente movilidad para llevar a 15 cabo un amplio rango de operaciones con exactitud en su mayor parte muy alta. Sin embargo, para algunas aplicaciones se necesita un manipulador que tenga menos grados de libertad, pero que permita operaciones más rápidas. Tal manipulador puede estar conectado mecánicamente de tal forma que la mano de soporte de herramienta esté en todo momento orientada en el espacio de manera predeterminada. 20 Por US 4.976.582 y WO 00/29177 se conoce previamente un manipulador por medio del que un elemento móvil en relación a un elemento estacionario puede ser movido en un espacio con orientación retenida e inclinación retenida. El manipulador tiene tres brazos que soportan conjuntamente el elemento móvil. Cada uno de estos brazos está articulado rotativamente en el elemento estacionario alrededor de un primer eje respectivo. El brazo soporta una articulación, cuyo extremo está articulado rotativamente en la parte exterior del brazo, permitiendo el movimiento en 25 dos grados de libertad. En su otro extremo, la articulación soporta el elemento móvil y está articulada en él, permitiendo un movimiento en dos grados de libertad. La articulación incluye dos articulaciones paralelas y está dispuesta, juntamente con el brazo, de tal manera que uno de los grados de libertad de cada extremo de la articulación constituya una rotación alrededor de un eje que sea 30 paralelo al primer eje del brazo respectivo. Independientemente de los movimientos del brazo o la articulación, estos tres ejes de rotación se mantienen así en paralelo. De esta forma, el elemento móvil siempre tendrá la misma orientación e inclinación en relación al elemento estacionario. Una condición, sin embargo, es que los primeros ejes respectivos de los brazos formen un ángulo uno con otro. Este tipo de robot industrial se denomina en general manipulador cinemático paralelo. 35 En el elemento móvil en este tipo de robot industrial, así como en otros varios tipos de robots industriales, el elemento móvil está provisto de un montaje giratorio para el montaje de una herramienta para la manipulación. El montaje giratorio tiene así un dispositivo de montaje para un cierto tipo de herramienta. 40 En EP 0 638 396 Al se describe un acoplamiento de transmisión para cabezal de manipulador, cabezal de manipulador que tiene una estructura base que soporta un elemento de montaje con un dispositivo de montaje. El elemento de montaje es pivotable. En muchos casos el robot se aplica para manipular tipos diferentes de productos que requieren tipos diferentes de 45 herramientas. Éste es el caso cuando los productos tienen diferente forma geométrica. También podría haber otros motivos para la necesidad de cambiar la herramienta. Por ejemplo, en la industria alimentaria, un producto podría incluir tuercas mientras que otro producto tiene que estar absolutamente libre de tuercas. Si uno de los productos no es simétrico en rotación, hay que recalibrar el robot al cambiar la herramienta. Alternativamente, se puede intercambiar la chapa en la que se haya de montar la herramienta. Sin embargo, esto requiere desmontar los brazos 50 del robot que soportan la chapa. Esto es complicado y lento. El objeto de la presente invención es superar los inconvenientes anteriores y así resolver el problema de lograr una operación de costo razonable en casos donde se requieren dos tipos diferentes de herramientas. 55 DE 20 2005 003 748 U1 describe un montaje giratorio para un manipulador que tiene una cierta flexibilidad. El montaje giratorio está construido por módulos con el fin de permitir diferentes números de mecanismos neumáticos para conexión al montaje giratorio. Resumen de la invención 60 En el contexto de la presente aplicación, los términos axial, radial, angular y central se refieren al eje definido por el montaje giratorio de dispositivo si no se indica explícitamente lo contrario.
El problema anterior se resuelve, según el primer aspecto de la invención, porque un dispositivo del tipo en cuestión 65 tiene las características específicas de que los medios de montaje incluyen al menos dos dispositivos de montaje
diferentes para dos tipos diferentes de herramientas, incluyendo un primero de dichos dispositivos de montaje medios de colocación que definen una cierta posición angular de una herramienta montada con relación al montaje giratorio y estando dispuesto un segundo de dichos dispositivos de montaje para permitir una posición angular arbitraria de una herramienta montada con relación al montaje giratorio. 5 Gracias a los dos tipos de dispositivos de montaje, uno y el mismo montaje giratorio puede ser usado para dos tipos diferentes de herramientas. Cuando haya que usar la otra herramienta, solamente se separará la herramienta montada de su dispositivo de montaje y se montará la otra herramienta en el otro dispositivo de montaje. Por ello, el cambio de una herramienta que requiere una cierta posición angular, tal como una herramienta de agarre, a una herramienta donde su orientación angular no importa, tal como una herramienta simétrica de rotación, por ejemplo 10 una ventosa o viceversa, se puede hacer muy fácil y a bajo costo. Esto proporciona mayor eficiencia cuando se requieren dichas herramientas diferentes durante uno e idéntico proceso de trabajo. La gran ventaja para el usuario del robot es así que la necesidad de recalibrar o intercambiar la chapa en la que va montada la herramienta se elimina al cambiar de herramienta. Esto se aplica si se cambia una herramienta de 15 rotación no simétrica por otra herramienta de rotación no simétrica así como si una herramienta de rotación simétrica se cambia por una herramienta de rotación no simétrica. La invención también tiene la ventaja de que el dispositivo combina la posibilidad de montar una herramienta de rotación no simétrica con el montaje ventajoso de peso razonable que generalmente se aplica para herramientas de 20 rotación simétrica. La invención ofrece así la posibilidad de un montaje de peso razonable y un montaje que incluye colocación angular. Según una realización preferida del dispositivo, los medios de montaje incluyen además un tercer dispositivo de montaje dispuesto para permitir una posición angular arbitraria de una herramienta de montaje con relación al 25 montaje giratorio. Esta realización representa otro paso en aplicar el concepto novedoso de la presente invención, permitiendo un grado de libertad todavía más alto para intercambiar herramientas. Así, esta realización es de especial interés si, por ejemplo, se ha de emplear otra herramienta de rotación simétrica además de una ventosa. Esta realización también 30 tiene la ventaja de que también en el caso en que solamente se requiere una herramienta rotativa simétrica, el montaje giratorio está adaptado a tales herramientas que tienen diferentes disposiciones de montaje. Según otra realización preferida, el primer dispositivo de montaje incluye una superficie de montaje circunferencial radial que tiene una pluralidad de agujeros axiales. 35 Éste es un tipo estándar de dispositivo de montaje para tales herramientas que requiere una cierta posición angular. Por lo tanto, una ventaja es la adaptación. Otra ventaja es que el dispositivo de montaje para la herramienta que requiere una cierta posición angular se situará por ello más remoto del eje que el otro dispositivo de montaje. Esto incrementa la precisión angular. 40 Según otra realización preferida al menos algunos de estos agujeros están roscados. Esto también es una medida de adaptación a cómo se dispone normalmente una herramienta de este tipo a montar y además incrementa la posibilidad de usar el montaje giratorio inventado para herramientas existentes. 45 Según una realización preferida, el segundo dispositivo de montaje incluye un agujero roscado central. Esto también es una adaptación a la construcción usual de tales herramientas que se pueden montar sin necesidad de prestar atención a su posición angular, lo que es ventajoso por una razón similar a las mencionadas 50 anteriormente. La disposición... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de robot industrial, incluyendo un montaje giratorio (7) con medios de montaje para el montaje de una herramienta, definiendo el dispositivo un eje (0) caracterizado porque los medios de montaje incluyen al menos dos dispositivos de montaje diferentes para dos tipos diferentes de herramientas, incluyendo un primero (8, 9) de 5 dichos dispositivos de montaje medios de colocación (9) que definen una cierta posición angular de una herramienta montada (20) con relación al eje (0) y estando dispuesto un segundo (10) de dichos dispositivos de montaje para permitir una posición angular arbitraria de una herramienta montada (30) con relación al eje (0). 2. Un dispositivo según la reivindicación 1 caracterizado porque los medios de montaje incluyen además un tercer 10 dispositivo de montaje (11) que está dispuesto para permitir una posición angular arbitraria de una herramienta montada con relación al eje (0). 3. Un dispositivo según la reivindicación 1 o 2 caracterizado porque el primer dispositivo de montaje (8, 9) incluye una superficie circunferencial radial (8) que tiene una pluralidad de agujeros axiales (9). 15 4. Un dispositivo según la reivindicación 3 caracterizado porque al menos algunos de los agujeros (9) están roscados. 5. Un dispositivo según cualquiera de las reivindicaciones 1-4 caracterizado porque el segundo dispositivo de 20 montaje (10) incluye un agujero roscado central. 6. Un dispositivo según la reivindicación 5 caracterizado porque el tercer dispositivo de montaje (11) incluye un agujero roscado central de un diámetro que es diferente del diámetro del agujero del segundo dispositivo de montaje. 25 7. Un robot industrial, caracterizado porque el robot incluye un dispositivo según cualquiera de las reivindicaciones 1-6. 8. Un robot industrial según la reivindicación 7 caracterizado porque el robot es un manipulador cinemático paralelo. 30 9. Un robot industrial según la reivindicación 7 o 8 caracterizado porque el robot está dispuesto para movimiento rápido, que significa un tiempo de ciclo para el movimiento en el rango de 0, 1 a 1,0 segundos, preferiblemente en el rango de 0,3 a 0,6 segundos. 10. Un método para manipular objetos por un robot industrial que tiene un dispositivo de robot que incluye un 35 montaje giratorio (7) con medios de montaje para el montaje de una herramienta, definiendo el dispositivo de robot un eje caracterizado por - proporcionar los medios de montaje con al menos dos dispositivos de montaje diferentes para dos tipos diferentes de herramientas, incluyendo un primero de dichos dispositivos de montaje medios de colocación que definen una 40 cierta posición angular de una herramienta montada con relación al eje y estando dispuesto un segundo de dichos dispositivos de montaje para permitir una posición angular arbitraria de una herramienta montada con relación al eje; - montar alternativamente una primera herramienta en el primer dispositivo de montaje y una segunda herramienta en el segundo dispositivo de montaje, y 45 - manipular alternativamente objetos con las herramientas primera y segunda. 11. Un método según la reivindicación 10 caracterizado porque los objetos son productos alimenticios. 50
Patentes similares o relacionadas:
DISPOSITIVO, SISTEMA Y MÉTODO DE FIJACIÓN CONTROLABLE MEDIANTE UN BRAZO MECÁNICO, del 2 de Abril de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico, del 27 de Marzo de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Mecanismo para cambio rápido de efector terminal robótico con acoplador magnético conmutable con soporte de momento, del 20 de Noviembre de 2019, de THE BOEING COMPANY: Un aparato de acoplamiento para cambio rápido de efector terminal robótico que comprende: un manipulador robótico que tiene movimiento controlable […]
Aparato de desconexión rápida para herramientas modulares, del 2 de Octubre de 2019, de Norgren Automation Solutions, LLC: Receptor de herramientas modulares, que comprende: una pared , que tiene un orificio que se extiende a través de la misma; […]
Abrazadera con un cilindro hidráulico de sujeción de carga con múltiples etapas telescópicamente extensibles, adaptadas para aplicar la fuerza de sujeción de carga alternativamente sensible a la fuerza de elevación de carga o al tamaño de la carga, del 3 de Julio de 2019, de CASCADE CORPORATION: Un sistema hidráulico de sujeción y elevación de carga que incluye al menos un cilindro hidráulico de sujeción de carga de un tipo con al menos una […]
Sistema adaptado a un robot para manipular objetos voluminosos, del 22 de Mayo de 2019, de PROYTECSA SECURITY, S.L: Un sistema adecuado para adaptarse a un robot que presenta un brazo articulado rematado en pinza, comprendiendo el sistema, para cada una de las hojas que conforma la pinza […]
Disposición de rampa con característica de extracción, del 17 de Mayo de 2019, de BECKMAN COULTER, INC.: Elemento adaptado para liberar un objeto agarrado por una unidad de agarre, en el que dicha unidad de agarre incluye una pluralidad […]