METODO PARA DETERMINAR LA VELOCIDAD ANGULAR EN UN MOTOR CONMUTDO MECANICAMENTE MIDIENDO UNICAMENTE LA CORRIENTE QUE CIRCULA POR EL MISMO.
Método para la determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo.
El método se basa en la determinación de los instantes en los que se van produciendo las ondulaciones de la componente alterna. Con esta información estima el valor de la frecuencia ripple con ella el valor de la velocidad angular del motor. Ambas magnitudes están directamente relacionadas debido a que por cada giro del motor se producen un número concreto de ondulaciones en la corriente que depende del número de polos y delgas del motor, entendiendo como ondulación a cada periodo de la componente alterna de la corriente. La detección de la ondulación se realiza mediante un registro de desplazamiento de longitud w en el que se van almacenando las últimas w muestras de la corriente del motor. Si se cumple que el valor máximo de la corriente se encuentra en la posición central del registro se supone que se acaba de detectar el pico y por tantose detecta la ondulación registrando el instante en el que se ha producido la detección. Dependiendo del valor de w se consigue filtrar en mayor o menor medida el ruido que aparece en la corriente
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200902143.
Solicitante: UNIVERSIDAD DE VALLADOLID.
Nacionalidad solicitante: España.
Provincia: VALLADOLID.
Inventor/es: GOMEZ GIL,JAIME, DIEZ HIGUERA,JOSE FERNANDO, VAZQUEZ SANCHEZ,ERNESTO, GARCIA MARTIN,JAVIER, GAMAZO REAL,JOSE CARLOS.
Fecha de Solicitud: 5 de Noviembre de 2009.
Fecha de Publicación: .
Fecha de Concesión: 26 de Enero de 2011.
Clasificación Internacional de Patentes:
- G01P3/48 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › midiendo la frecuencia de la corriente o tensión generadas.
- H02P6/18 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
- H02P7/28A
Clasificación PCT:
- G01P3/48 G01P 3/00 […] › midiendo la frecuencia de la corriente o tensión generadas.
- H02P6/18 H02P 6/00 […] › sin elementos separados para detectar la posición.
- H02P7/28 H02P […] › H02P 7/00 Disposiciones para la regulación o el control de la velocidad o el par de motores eléctricos de corriente continua. › que utilizan dispositivos semiconductores.
Fragmento de la descripción:
Método para determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo.
Sector de la técnica
La invención pertenece al campo de la detección de la velocidad angular en un motor de corriente continua conmutado mecánicamente mediante delgas y escobillas. La técnica objeto de invención se encuadra dentro de las técnicas de detección sensorless y aprovecha el rizado que aparece en la corriente que circula por el motor. La ventaja que presenta este nuevo método es la de filtrar el ruido que aparece junto a la corriente mediante una ventana de observación de las muestras de la corriente cuyo tamaño es variable.
Antecedentes de la invención
En un motor de corriente continua, la corriente que circula está compuesta por una componente de encargada de suministrar la potencia y una componente ac. La componente ac, también conocida como componente ripple, es debida al efecto conjunto de que la fuerza electromotriz inducida (f.e.m.) en las bobinas del rotor no es constante sino que tienen una forma sinusoidal y a que esta no es rectificada de forma perfecta en el colector de delgas. Además de esto, en el colector de delgas tiene lugar el proceso de conmutación de delga por parte de la escobillas. En el proceso de conmutación, justo en el momento en el que las escobillas se posicionan entre dos delgas, se cortocircuita la bobina unida a esas dos delgas produciendo un incremento de la corriente.
La frecuencia de dicha componente alterna de la corriente está relacionada con la velocidad de giro del motor, según lo comentado anteriormente, y con algunos parámetros constructivos como son el número de delgas del rotor y el número de polos del motor. Es por ello, que si se consigue detectar la frecuencia de esta componente se puede obtener la velocidad angular del motor.
Cada periodo de la componente alterna de la corriente es conocida en la literatura con el nombre de ondulación. Por lo general, el problema de detectar la frecuencia de la componente alterna se reduce al problema de detectar todas y cada una de las ondulaciones y medir la distancia temporal entre las mismas. Esta no es una tarea trivial, pues todo el ruido presente en la alimentación del motor es reflejado en la corriente. A todo este ruido hay que sumar el ruido generado y las interferencias captadas por el propio motor. Todo ello hace que muchas ondulaciones no puedan ser detectadas (ondulaciones fusionadas) y que aparezcan ondulaciones que no debieran (ondulaciones fantasmas). Lo que provoca imprecisiones en la determinación de la frecuencia ripple y con ello en la velocidad angular.
Mecanismos basados en la detección de la frecuencia de la componente alterna, conocida como frecuencia ripple, los podemos encontrar en documentos como son US 3 346 752, US 5 524 168 y US 6 172 473 B1. El problema de estas invenciones es que no tienen en cuenta explícitamente el problema del ruido. Por otro lado hay otras invenciones como son ES 2 190 011 T3, US 6 839 653 B2 y US 5 581 178 que si que tienen en cuenta el ruido y las posibles ondulaciones fantasmas y fusionadas. El problema que tienen éstas es el alto coste computacional que conllevan. Algunas de ellas requieren realizar la FFT. Por esta razón se propone un nuevo método que tenga en cuenta el ruido y no tenga un excesivo coste computacional.
Descripción de la invención
La invención se basa en la detección de las ondulaciones de la componente alterna de la corriente para determinar la velocidad angular de un motor de corriente continua conmutado mecánicamente. Por ello, en primer lugar lo que se hace es medir la corriente mediante un sensor resistivo tipo shunt. Posteriormente se digitaliza mediante un convertidor analógico/digital con una frecuencia de muestreo adecuada. A partir de este momento se procesa la señal de la corriente en el dominio digital mediante un microcontrolador, DSP o DSC.
Según se van recibiendo las muestras digitales de la corriente se van almacenando las últimas w muestras de forma consecutivas en una memoria configurada como un registro de desplazamiento. Este registro de desplazamiento tiene numeradas todas sus posiciones de 0 a w-1, de forma que la posición 0 corresponde a la última muestra capturada, la posición 1 a la muestra anterior y así sucesivamente. Para determinar si se ha producido o no una ondulación se mira si en la posición central del registro de desplazamiento, (w-1)/2, se encuentra almacenado el valor máximo de la corriente de entre todos los valores almacenados en el registro de desplazamiento. Si la respuesta es afirmativa, quiere decir que se ha detectado una ondulación. Para filtrar más o menos ruido, es decir, detectar las ondulaciones fusionadas y eliminar las ondulaciones fantasmas, basta con ajustar de forma adecuada el valor w. Este parámetro tiene que tener un valor impar y debe ser mayor o igual que 3 para que el método funcione correctamente. El valor de w se puede tomar de forma fija o de forma que sea proporcional al periodo de la componente alterna de la corriente. Hay que denotar que en todas las situaciones w debe ser menor estrictamente que el número de muestras que entran en un periodo de la componente alterna. Una elección u otra en el valor de w dependerá de la complejidad y del nivel de ruido presente.
Una vez en la que se han detectado las ondulaciones y se conoce la distancia temporal entre muestras, se procede a calcular el valor de la frecuencia de la componente alterna, o frecuencia ripple, como el inverso de la distancia entre ondulaciones detectadas. Finalmente, esta frecuencia hallada, se convierte en velocidad del motor.
Descripción de las figuras
La descripción de la invención se acompaña de una serie de figuras con el fin ayudar su compresión.
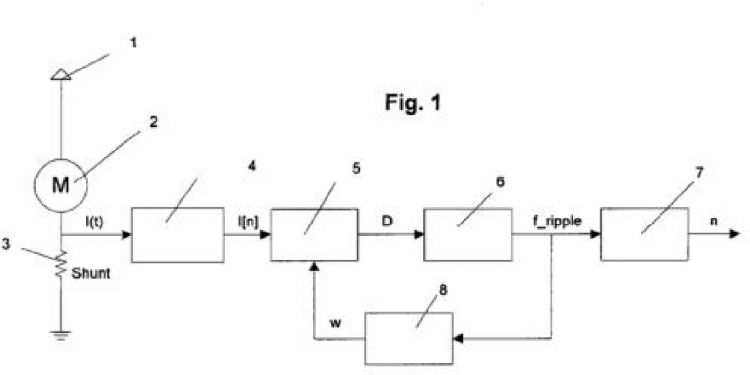
La figura 1 muestra el diagrama de bloques del método propuesto para la detección de la velocidad angular.
La figura 2 muestra esquemáticamente una posible implementación del bloque Detector de Máximo (5).
Descripción de un ejemplo de realización de la invención
En la figura 1 se muestra el diagrama de bloques del método objeto de invención. En él aparecen el sistema de alimentación del motor (1), el propio motor (2), el sensor de corriente tipo shunt (3). El siguiente bloque (4) es el convertidor analógico/digital que se encarga de digitaliza la corriente con una frecuencia de muestreo fs adecuada. El Detector de Máximo (5) detecta si se ha producido o no una ondulación, este bloque se explicará más adelante con mayor detalle. Al detector de frecuencia (6) le llega en cada instante discreto un valor lógico del Detector de Máximo (5) que le indica si en el instante actual se ha detectado una ondulación o por el contrario si no se ha detectado. Si no se ha detectado ninguna no hace nada. Si por el contrario se ha detectado una ondulación registra el instante actual como instante de detección de ondulación. Con esa información obtiene la frecuencia de la componente alterna o frecuencia ripple. Para ello se utiliza la siguiente ecuación:
Donde Tk es el instante en el que se detectó la última ondulación y Tk-1 el instante de la ondulación anterior. Una vez obtenida la frecuencia ripple se pasa al bloque Convertidor Frecuencia-Velocidad (7). En este bloque tiene lugar la conversión de frecuencia ripple a la velocidad angular del motor. Estas dos magnitudes están relacionadas según la siguiente ecuación:
En dicha ecuación 2p es el número de polos del motor, p es el número de pares de polos, k es el número de delgas del colector, n es la velocidad angular del motor en r.p.m. y fripple la frecuencia ripple en Hz. El parámetro η es el máximo común divisor de 2p y k tal como se indica en la siguiente ecuación:

El último bloque es el estimador de ventana (8). Este bloque se encarga de obtener el parámetro w que es utilizado en el bloque Detector de Máximo. Este parámetro debe cumplir que sea impar y mayor o igual que 3 y menor que el número de muestras que ocupa un periodo de...
Reivindicaciones:
1. Método para determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo dentro de un sistema caracterizado por constar de un sistema de alimentación del motor (1), un motor (2), un sensor de corriente tipo shunt (3) para medir el valor de la corriente que circula por el motor (2), un convertidor analógico/digital (4) para digitalizar el valor de la corriente a una frecuencia de muestreo fs adecuada y un microcontrolador, DSP o DSC para el procesado de las muestras digitales de la corriente y obtención del valor de la velocidad de acuerdo con las siguientes etapas:
a) Los valores muestreados de la corriente son recogidos por el bloque Detector Máximo (4) donde son almacenados en una memoria configurada como un registro de desplazamiento de tamaño w en el que la última muestra adquirida se almacena en la posición 0, la anterior en la posición 1 y así sucesivamente. El tamaño del registro de desplazamiento w se caracteriza por ser un valor impar mayor o igual que 3 e inferior al número de muestras que entran en un periodo ripple fripple/fs, donde fs es la frecuencia de muestreo. Sobre el registro de desplazamiento se comprueba si el valor máximo se encuentra en la posición central del registro de desplazamiento (w-1)/2. Si es así una señal indica que se ha detectado una ondulación.
b) Cada vez que se detecta una ondulación el bloque Detector de Frecuencia (6) registra el instante temporal en el que se ha detectado. Siendo el instante de la última ondulación Tk y el de la ondulación anterior Tk-1. Con los instantes de las ondulaciones se obtiene el valor de la frecuencia ripple como el inverso de la diferencia entre ambos instantes.
c) Posteriormente, con la frecuencia ripple el bloque Convertidor Frecuencia-Velocidad (7) obtiene la velocidad angular del motor mediante la ecuación que relaciona ambas magnitudes:
Donde n es la velocidad angular del motor expresada en revoluciones por minutos, 2p es el número de polos del motor, k es el número de delgas del colector de delgas, η es el máximo común divisor de 2p y k y fripple es la frecuencia ripple.
2. Método para determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo según la reivindicación 1 donde el tamaño del registro de desplazamiento w se calcula de forma dinámica, de acuerdo con los requisitos indicados en la reivindicación 1 y siendo w proporcional al periodo ripple, inverso de la frecuencia ripple:

Donde el operando [•] es la parte entera y c es un factor fijo que determina el valor de ruido a filtrar. Para frecuencias de muestreo mucho mayores que la frecuencia ripple c puede tomar valores entre 0 y 0,5.
3. Método para determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo según la reivindicación 1 donde la indicación de que se ha producido una ondulación se lleva a cabo comprobando sobre el registro de desplazamiento si el valor mínimo, en lugar del máximo, se encuentra en la posición central del registro de desplazamiento.
4. Uso del procedimiento descrito para medir y controlar la velocidad de piezas que se mueven solidarias al eje de un motor de corriente continua conmutado mecánicamente.
Patentes similares o relacionadas:
Controlador, del 16 de Octubre de 2019, de Aeristech Control Technologies Limited: Un sistema de control para un motor o generador de imán permanente que incluye tres bobinados de fase individuales, bobinado de fase A, bobinado […]
Procedimiento de control implementado para controlar dos motores eléctricos síncronos de imán permanente conectados en paralelo, del 14 de Agosto de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de control implementado en un convertidor de potencia que comprende una salida conectada a dos motores (Mot1, Mot2) eléctricos […]
Circuito de control y procedimiento de regulación para máquina síncrona, del 10 de Julio de 2019, de SIRONA DENTAL SYSTEMS GMBH: Circuito de control para una máquina síncrona de una pieza de mano dental, que presenta una alimentación de tensión , caracterizado por que el circuito de control presenta […]
Máquina de trabajo agrícola, del 22 de Mayo de 2019, de PÖTTINGER Landtechnik GmbH: Máquina de trabajo agrícola en forma de un remolque autocargador que se puede montar en un tractor , con un recolector que está provisto de un […]
Sistema y método para monitorizar y controlar un motor eléctrico sin escobillas, del 26 de Abril de 2019, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Sistema para la monitorización y control de un motor sin escobillas, siendo el motor trifásico y asociable con una fuente de energía eléctrica por medio de un rectificador, […]
Freno de detención para vehículos de motor sobre raíles, del 3 de Abril de 2019, de Siemens Mobility GmbH: Vehículo de motor sobre raíles con un freno de detención, estando realizado el freno de detención por medio de al menos una máquina eléctrica , que presenta un rotor […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Compresor, del 25 de Febrero de 2019, de DAIKIN INDUSTRIES, LTD.: Un compresor que emplea CH2F2 (R32) como refrigerante único, o CH2F2 (R32) como refrigerante mixto rico en el que CH2F2 (R32) excede el 50 %, en el que el compresor […]