PROCEDIMIENTO Y DISPOSITIVO DE GUÍA DE UN REMOLQUE Y VEHÍCULO EQUIPADO CON DICHO DISPOSITIVO.
Procedimiento de guiado de un remolque (RQ) equipado con al menos un eje remolcado (R) directriz,
a lo largo de la trayectoria (C) descrita por un vehículo tractor (VT), equipado con al menos un eje tractor (T) tal que: - se muestrea la trayectoria (C) del vehículo tractor (VT) en función de la distancia recorrida por el enganche, constituido por dicho vehículo tractor (VT) y por el remolque (RQ), para determinar el desplazamiento del vehículo tractor (VT), - se registran sucesivamente parámetros relativos a la posición (Cj) del eje tractor (T) en la trayectoria (C) y, más en particular, cada vez que el eje tractor ha recorrido una distancia predeterminada (d), el ángulo de giro delantero (f) del vehículo tractor, así como el ángulo de giro posterior (r) del eje remolcado (R), - se calcula, paso a paso, con iteración, el ángulo de giro (αi) a aplicar al eje directriz remolcado (R) de forma que se desplace en la trayectoria teniendo en cuenta una cantidad predeterminada de N posiciones (Cj) registradas previamente, - se aplica al menos parcialmente dicho ángulo de giro (αi) calculado para dicho eje remolcado (R) y donde, para cada iésima iteración en el transcurso de la cual el eje directriz remolcado (R) se encuentra en la posición R0 (i) y se desplaza hacia la posición R1(i): a) se mide el ángulo de giro delantero (f0) y el ángulo de giro posterior (r0) en el punto R0(i), b) se mide el ángulo de giro delantero (f1) y el ángulo de giro posterior (r1) en el punto R1(i), c) se calcula un ángulo elemental de corrección (ei) a aplicar al eje directriz remolcado (R) cuando se encuentra en la posición R0(i+N) teóricamente de nuevo ocupada por el eje remolcado (T), de forma que dicho ángulo de giro (αi) aplicado al eje directriz remolcado (R) en la posición R0(i+N) resulta de la suma de los N ángulos elementales (ek) de corrección de trayectoria asociados a los N puntos (Cj) de la trayectoria situada entre el eje tractor (T) y el eje directriz remolcado (R), a saber:
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04370004.
Solicitante: OPTIMA CONCEPT S.A.R.L.
Nacionalidad solicitante: Francia.
Dirección: Z.I. DES HALLOTS 62620 RUITZ FRANCIA.
Inventor/es: Norodine,Michel, Houssard,Olivier.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Febrero de 2004.
Clasificación Internacional de Patentes:
- B62D13/02B
- B62D13/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 13/00 Dirección adaptada especialmente a los remolques (atalaje de tracción y de dirección combinados B60D). › para ruedas de giro individual.
Clasificación PCT:
- B62D13/00 B62D […] › Dirección adaptada especialmente a los remolques (atalaje de tracción y de dirección combinados B60D).
Clasificación antigua:
- B62D13/00 B62D […] › Dirección adaptada especialmente a los remolques (atalaje de tracción y de dirección combinados B60D).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2364966_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un procedimiento y un dispositivo para el guiado de un remolque directriz en la trayectoria seguida por un vehículo tractor.
Si bien la invención es de aplicación al caso de un verdadero enganche que comprende un vehículo tractor con un eje directriz y un remolque, la invención se refiere también al caso de un vehículo cuyos ejes delantero y posterior son directrices.
La invención se refiere igualmente a un vehículo provisto con tal dispositivo de guía.
En particular, la invención se ha desarrollado en el marco de las máquinas de uso agrícola. En efecto, en el campo, durante el tranajo de un tractor con remolque, se pueden presentar varios problemas. Primeramente, el paso repetido de las ruedas sobre las plantas termina por aplastarlas y destruirlas, lo que provoca una pérdida de rendimiento. Resulta primordial entonces que la huella del paso de las ruedas del enganche sea lo más reducida posible y, principalmente, que las ruedas del remolque pasen por el mismo sitio que las ruedas del tractor.
Otro inconveniente encontrado proviene del hecho de que, en los giros, la maquinaria remolcada tiene tendencia a cortar la trayectoria seguida inicialmente por el vehículo tractor, lo que aumenta la superficie de aplastamiento. Además, cuando la máquina remolcada es un pulverizador, algunas zonas del campo corren el riesgo de recibir una mayor dosis del producto pulverizado, mientras que otras recibirán menos debido al plazo necesario para el restablecimiento manual de la trayectoria. Por tanto, esto acarrea sobredosis o infradosis de los productos aplicados, lo que resulta particularmente perjudicial. En efecto, el tratamiento pierde eficacia, lo que origina un aumento de su coste y el riesgo de que disminuya su rendimiento.
Por ejemplo, cuando el producto pulverizado es un fungicida, las zonas con menor dosis de producto pueden ser objeto de la enfermedad contra la cual está previsto el tratamiento y, por ello, pueden constituir un foco susceptible de contaminar otras plantas, una vez atenuada la intensidad del tratamiento.
El problema de sobredosis o infradosis ocurre también con otros tipos de remolques. Este es el caso, por ejemplo, de un esparcidor de estiércol o de abono o de cualquier otra máquina cuya función sea esparcir un producto en un campo.
Existen diversos dispositivos que se proponen resolver el problema del seguimiento de la trayectoria de un eje motriz mediante un eje directriz remolcado. No obstante, el conjunto de dichos dispositivos funciona según el principio del simple traslado del ángulo de giro de las ruedas delanteras del vehículo tractor a las ruedas directrices del remolque. Algunos dispositivos prevén igualmente un traslado diferido del ángulo de giro.
Se conocen también los documentos US 2001/054524, US 5.329.451 o también el documento US 5.366.059, que se basan, al menos en parte, en este principio. El documento US 2001/054524 combina este modo de control con otros dos modos de control. La corrección final aplicada al eje direccional del remolque es aproximada.
No obstante, estos dispositivos presentan diversos inconvenientes, siendo el primero que no permiten seguir con eficacia la huella de la trayectoria del vehículo tractor por parte del remolque. En todos los casos, aunque se constate una mejora de la trayectoria del remolque, ésta sigue cortando la trayectoria del vehículo tractor.
Además, tales dispositivos basados en el traslado del ángulo directo o indirecto no tienen en cuenta de forma suficiente los cambios de dirección del vehículo tractor.
Finalmente, en lo que se refiere a los dispositivos con traslado de ángulo diferido, la señal resultante del traslado del ángulo se genera o bien a intervalos de tiempo constantes, en la hipótesis de una velocidad de avance del vehículo tractor constante, o bien considerando la velocidad de avance y la longitud del chasis. De este modo, tales sistemas carecen de precisión, principalmente en caso de que el vehículo tractor cambie de velocidad o se detenga, ya que se basan en una medida indirecta de la distancia recorrida.
El objeto de la presente invención es proponer un procedimiento y un dispositivo de guía de un remolque, así como un vehículo equipado con tal dispositivo que palien los inconvenientes anteriormente citados.
Un objeto de la presente invención es proponer un procedimiento de guía de un remolque de forma que éste siga huella a huella la trayectoria del vehículo tractor, así como un dispositivo apto para llevar a cabo tal procedimiento de guiado.
Otro objeto de la presente invención es proponer un procedimiento y un dispositivo de guía lo bastante flexibles para ser adaptados a diversos tipos de enganches, en particular agrícolas, sector donde es frecuente utilizar sucesivamente diferentes máquinas remolcadas pero un mismo vehículo tractor.
Otro objeto de la presente invención es proponer un procedimiento de guía que permita disminuir las pérdidas tanto a nivel del rendimiento como a nivel de la eficacia de los tratamientos aplicados a los cultivos.
Otro objeto de la presente invención es proponer un procedimiento y un dispositivo de guía de un remolque que tengan en cuenta posibles modificaciones de la dirección seguida por el vehículo tractor en el interior de un giro.
5 Otro objeto de la invención es proponer un procedimiento y un dispositivo de guía independientes de la velocidad del enganche.
Otros objetos y ventajas de la invención se pondrán de manifiesto en el transcurso de la descripción a continuación, dada sólo a título indicativo sin por ello limitarla.
La invención se refiere a un procedimiento de guía de un remolque (RQ) equipado con al menos un eje de 10 remolcado (R) directriz, a lo largo de una trayectoria (C) descrita por un vehículo tractor (VT), equipado con al menos un eje tractor (T), de forma que:
- se hace un muestreo de la trayectoria (C) del vehículo tractor (VT) en función de la distancia recorrida por el enganche, constituido por dicho vehículo tractor (VT) y por el remolque (RQ), para determinar el desplazamiento del vehículo tractor (VT),
15 - se registran sucesivamente parámetros relativos a la posición (Cj) del eje tractor (T) en la trayectoria (C) y, más particularmente, cada vez que el eje tractor ha recorrido una distancia predeterminada (d), del ángulo de giro delantero (f) del vehículo tractor así como del ángulo de giro posterior (r) del eje remolcado (R),
- se calcula paso a paso por iteración, el ángulo de giro (αi) a aplicar al eje directriz remolcado (R) para que
se desplace en la trayectoria teniendo en cuenta la cantidad predeterminada de N posiciones (Cj)20 registradas anteriormente,
- se aplica al menos parcialmente dicho ángulo de giro (αi) calculado para dicho eje remolcado (R),
y donde para cada iésima iteración durante la cual el eje directriz remolcado (R) se encuentra en la posición R0
(i) y se desplaza hacia la posición R1(i):
a) se mide el ángulo de giro delantero (f0) y el ángulo de giro posterior (r0) en el punto R0(i),
25 b) se mide el ángulo de giro delantero (f1) y el ángulo de giro posterior (r1) en el punto R1(i),
c) se calcula un ángulo elemental de corrección (ei) para aplicar al eje directriz remolcado (R) cuando se encuentre en la posición R0(i+N) teóricamente de nuevo ocupado por el eje remolcado (T),
de modo que dicho ángulo de giro (αi) aplicado al eje directriz remolcado (R) en la posición R0(i+N) resulta de la suma de los N ángulos elementales (ek) de corrección de la trayectoria asociados a los N puntos (Cj) de la
30 trayectoria situada entre el eje tractor (T) y el eje directriz remolcado (R) a saber:
**(Ver fórmula)**
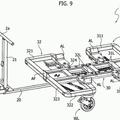
La invención se refiere igualmente a un dispositivo de guía de un remolque (RQ) equipado con al menos un eje directriz (R), a lo largo de una trayectoria (C) descrita por un vehículo tractor (VT) equipado con al menos un eje tractor (T), que comprende:
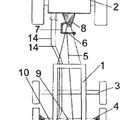
35 - unos medios de muestreo de la trayectoria (C) del vehículo tractor (VT) en función de la distancia recorrida por dicho enganche, para determinar el desplazamiento del vehículo tractor (VT), se presentan bajo la forma de detectores de desplazamiento (5);
-... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de guiado de un remolque (RQ) equipado con al menos un eje remolcado (R) directriz, a lo largo de la trayectoria (C) descrita por un vehículo tractor (VT), equipado con al menos un eje tractor (T) tal que:
- se muestrea la trayectoria (C) del vehículo tractor (VT) en función de la distancia recorrida por el enganche, constituido por dicho vehículo tractor (VT) y por el remolque (RQ), para determinar el desplazamiento del vehículo tractor (VT),
- se registran sucesivamente parámetros relativos a la posición (Cj) del eje tractor (T) en la trayectoria (C) y, más en particular, cada vez que el eje tractor ha recorrido una distancia predeterminada (d), el ángulo de giro delantero (f) del vehículo tractor, así como el ángulo de giro posterior (r) del eje remolcado (R),
- se calcula, paso a paso, con iteración, el ángulo de giro (αi) a aplicar al eje directriz remolcado (R) de forma que se desplace en la trayectoria teniendo en cuenta una cantidad predeterminada de N posiciones (Cj) registradas previamente,
- se aplica al menos parcialmente dicho ángulo de giro (αi) calculado para dicho eje remolcado (R)
y donde, para cada iésima iteración en el transcurso de la cual el eje directriz remolcado (R) se encuentra en la posición R0 (i) y se desplaza hacia la posición R1(i):
a) se mide el ángulo de giro delantero (f0) y el ángulo de giro posterior (r0) en el punto R0(i),
b) se mide el ángulo de giro delantero (f1) y el ángulo de giro posterior (r1) en el punto R1(i),
c) se calcula un ángulo elemental de corrección (ei) a aplicar al eje directriz remolcado (R) cuando se encuentra en la posición R0(i+N) teóricamente de nuevo ocupada por el eje remolcado (T), de forma que dicho ángulo de giro (αi) aplicado al eje directriz remolcado (R) en la posición R0(i+N) resulta de la suma de los N ángulos elementales (ek) de corrección de trayectoria asociados a los N puntos (Cj) de la trayectoria situada entre el eje tractor (T) y el eje directriz remolcado (R), a saber:
**(Ver fórmula)**
2. Procedimiento según la reivindicación 1, caracterizado porque el ángulo elemental de corrección ei para K=i se calcula según las fórmulas siguientes:
3. Procedimiento según la reivindicación 1 o 2, caracterizado porque se registra el ángulo elemental de corrección (ei) en un registro de desfase (12).
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque se calcula por interpolación entre dos posiciones registradas sucesivas (Cj, Cj+1) una posición intermedia para mejorar la precisión del guiado.
5. Dispositivo de guiado de un remolque (RQ) equipado con al menos un eje directriz (R), a lo largo de la trayectoria (C) descrita por un vehículo tractor (VT) equipado con al menos un eje tractor T que comprende:
**(Ver fórmula)**
medios de muestreo de la trayectoria (C) del vehículo tractor (VT) en función de la distancia recorrida por dicho enganche, para determinar el desplazamiento del vehículo tractor (VT), que se presenta bajo la forma de un detector de desplazamiento (5);
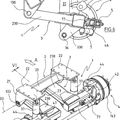
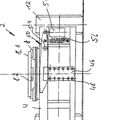
medios de medición y medios de registro de los parámetros relativos a la posición (Cj) del eje tractor (T) en la trayectoria (C), en función de dicho desplazamiento, que se presenta bajo la forma de dos detectores de posición angular (6,7) que miden respectivamente, por una parte, el ángulo formado entre el eje directriz remolcado (R) y el eje tractor (T), a saber el ángulo de giro delantero (f), y por otra parte, el ángulo de giro posterior (r) de las ruedas del eje directriz remolcado,
caracterizado porque presenta:
medios para el cálculo del ángulo de giro (αi) para la realización del procedimiento según una de las reivindicaciones 1 a 4, a aplicar al eje directriz remolcado (R) para que se desplace en la trayectoria (C);
medios de mando para aplicar al menos en parte dicho ángulo de giro (αi) calculado a dicho eje directriz remolcado (R) necesitando dicho dispositivo sólo tres detectores, a saber los dos detectores angulares (6,7) por una parte y el detector de desplazamiento (5), por otra parte, para garantizar el guiado del eje directriz en la trayectoria del vehículo tractor.
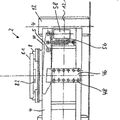
6. Dispositivo según la reivindicación 5, caracterizado porque comprende una calculadora (9) que integra unos medios de registro que se presentan bajo la forma de una memoria (11) y/o de un registro de desfase (12), unos medios de cálculo que se presentan bajo la forma de un microprocesador (10) y unos medios de mando (13) de un circuito hidráulico (14) destinados a aplicar al menos en parte dicho ángulo de giro (αi) calculado a dicho eje directriz remolcado (R).
Patentes similares o relacionadas:
Carro de transporte con ruedas de dirección, del 3 de Abril de 2019, de TELLURE ROTA S.P.A.: Carro de transporte que comprende - un bastidor que se extiende desde una porción delantera a una porción trasera , a lo largo de una dirección […]
 Carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, del 13 de Abril de 2016, de COMAU S.P.A.: Una carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, que comprende:
• una estructura provista de una […]
Carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, del 13 de Abril de 2016, de COMAU S.P.A.: Una carretilla para el transporte de contenedores para piezas o componentes en una planta industrial, que comprende:
• una estructura provista de una […]
 PROCEDIMIENTO Y DISPOSITIVO DE MANDO DE LAS RUEDAS DIRECTRICES DE UN REMOLQUE, del 11 de Junio de 2010, de MONROC: Procedimiento de mando de las ruedas directrices de un remolque unido por una articulación a un vehículo tractor que comprende:
- […]
PROCEDIMIENTO Y DISPOSITIVO DE MANDO DE LAS RUEDAS DIRECTRICES DE UN REMOLQUE, del 11 de Junio de 2010, de MONROC: Procedimiento de mando de las ruedas directrices de un remolque unido por una articulación a un vehículo tractor que comprende:
- […]
 GRUPO DE EJES PARA LA PREPARACION PARA UTILIZAR REMOLQUES EN GENERAL, del 9 de Junio de 2010, de D.B.D. S.P.A: Grupo de ejes destinado a su asociación con unos medios arrastrados, como un remolque con por lo menos un eje, que comprende un elemento transversal […]
GRUPO DE EJES PARA LA PREPARACION PARA UTILIZAR REMOLQUES EN GENERAL, del 9 de Junio de 2010, de D.B.D. S.P.A: Grupo de ejes destinado a su asociación con unos medios arrastrados, como un remolque con por lo menos un eje, que comprende un elemento transversal […]
 EJE DE TIPO DOLLY, del 2 de Junio de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
EJE DE TIPO DOLLY, del 2 de Junio de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
 EJE DE TIPO DOLLY, del 3 de Mayo de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
EJE DE TIPO DOLLY, del 3 de Mayo de 2010, de FAHRZEUGWERK BERNARD KRONE GMBH: Eje Dolly ; con una barra de remolque tractora que en un bastidor está fijada de manera giratoria alrededor de un eje vertical y con un acoplamiento […]
 UNIDAD DE RUEDA SIMPLE DIRIGIBLE PARA TRAILERES, del 29 de Marzo de 2010, de STEERABLE WHEEL SYSTEMS PTY LTD: Una unidad de rueda simple , adaptada para montarse en un cuerpo de vehículo , que comprende:
un bastidor de rueda que soporta un mecanismo de […]
UNIDAD DE RUEDA SIMPLE DIRIGIBLE PARA TRAILERES, del 29 de Marzo de 2010, de STEERABLE WHEEL SYSTEMS PTY LTD: Una unidad de rueda simple , adaptada para montarse en un cuerpo de vehículo , que comprende:
un bastidor de rueda que soporta un mecanismo de […]
 DISPOSITIVO DIRECCIONAL PARA REMOLQUES, del 13 de Mayo de 2010, de TALLERES CARRUXO S.L: 1. Dispositivo direccional para remolques, que siendo aplicable a las ruedas posteriores de un remolque arrastrado por un vehículo tractor, con el fin de conseguir […]
DISPOSITIVO DIRECCIONAL PARA REMOLQUES, del 13 de Mayo de 2010, de TALLERES CARRUXO S.L: 1. Dispositivo direccional para remolques, que siendo aplicable a las ruedas posteriores de un remolque arrastrado por un vehículo tractor, con el fin de conseguir […]