ROBOT MODULAR.
Un robot de amplia cobertura (100) que comprende: un chasis (202);
múltiples conjuntos de rueda motriz (110a-b) dispuestos sobre el chasis (202), comprendiendo cada conjunto de rueda motriz: una carcasa del conjunto de rueda motriz (324a-b); una rueda (326a-b) acoplada giratoriamente a la carcasa (324a-b); y un motor de accionamiento de rueda (328a-b) situado en la carcasa del conjunto de rueda motriz (324ab) y que funciona para accionar la rueda (326a-b); y un conjunto de limpieza (112, 102) situado en el chasis (202) comprendiendo el conjunto de limpieza: una carcasa del conjunto de limpieza (332-338); un cabezal de limpieza (334, 340) acoplado giratoriamente a la carcasa del conjunto de limpieza (332, 338); y un motor de accionamiento de limpieza (336, 342) situado en la carcasa del conjunto de limpieza (332, 338) y que funciona para accionar el cabezal de limpieza (334, 340); en el que cada uno de los conjuntos de rueda (110a-b) y el conjunto de limpieza (112, 102) puede extraerse por separado e independientemente de los receptáculos respectivos (304, 306, 308, 310) del chasis (202) como unidades completas
Tipo: Resumen de patente/invención. Número de Solicitud: W06046404US.
Solicitante: IROBOT CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 63 SOUTH AVENUE, BURLINGTON,MASSACHUSETTS 01803.
Inventor/es: WON,CHIKYUNG, SVENDSEN,SELMA, SANDIN,PAUL E, BURNETT,SCOTT THOMAS, KAPOOR,DEEPAK RAMESH, HICKEY,STEPHEN, RIZZARI,ROBERT, DUBROVSKY,ZIVTHAN A.C.
Fecha de Publicación: .
Fecha Concesión Europea: 9 de Septiembre de 2009.
Clasificación Internacional de Patentes:
- G05D1/02E16D
- G05D1/02E6N
Clasificación PCT:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Fragmento de la descripción:
Robot modular.
Campo técnico
Esta invención se refiere a robots y, más particularmente, a robots de amplia cobertura.
Antecedentes
El documento WO 01/91623 A2 describe la técnica anterior pertinente.
En el campo de la robótica doméstica, para oficinas y/u orientada a consumidores, los robots móviles que realizan funciones domésticas, tales como pasar la aspiradora, se han adoptado ampliamente y pueden encontrarse ejemplos de robots que realizan el fregado del suelo, patrullan, cortan el césped y otras tareas. Los robots móviles contienen muchos componentes, algunos de los cuales pueden desgastarse o requerir mantenimiento antes que otros componentes. Generalmente, cuando un componente falla el robot puede tener importantes problemas de funcionamiento o fallar en su conjunto. Puede requerirse a un usuario que envíe el robot completo a un taller de reparación para revisarlo, lo que puede requerir desmontar partes significativas del robot o, si el coste de reparación supera el valor del robot, el robot puede desecharse. Como alternativa, el usuario puede necesitar adquirir un nuevo robot entero.
Sumario
La invención es un robot de amplia cobertura como se define en la reivindicación 1.
Los robots de amplia cobertura tienen numerosos componentes que pueden requerir el mantenimiento periódico durante la vida de servicio. Un robot de amplia cobertura se usa para tratar una superficie. Esto incluye limpiar así como pulir, pintar, revestir, barrer, esterilizar, aplicar tratamientos y más. Un robot de amplia cobertura modular que permite la retirada de componentes discretos o conjuntos para su reparación o sustitución mejora la capacidad de mantenimiento del robot y aumenta la vida de servicio global del robot. Además, algunos módulos pueden cambiarse por un módulo alternativo que se adapta en la misma cavidad conformada pero que tiene diferente funcionalidad. En general, los siguientes módulos pueden retirarse de un robot de amplia cobertura y sustituirse sin afectar a la funcionalidad del robot: un cabezal de limpieza principal, un cabezal de cepillado lateral, un módulo de ruedas, una papelera de vacío, un panel o cubierta superior sustituible, un control remoto empotrable en una cubierta, un panel de retención inferior sustituible, una cubierta o elemento deslizante, una batería, un parachoques y una rueda orientable delantera.
En un aspecto, el robot de amplia cobertura incluye un chasis, múltiples conjuntos de rueda motriz dispuestos en el chasis y un conjunto funcional que incluye un cabezal funcional (por ejemplo, un conjunto de limpieza) situado en el chasis. Cada conjunto de rueda motriz (por ejemplo, un módulo de rueda motriz) incluye una carcasa del conjunto de rueda motriz, una rueda acoplada giratoriamente a la carcasa y un motor de accionamiento de la rueda situado en la carcasa del conjunto de rueda motriz y que puede funcionar para accionar la rueda. El conjunto de limpieza (por ejemplo, el módulo de cabezal funcional) incluye una carcasa del conjunto de limpieza, un cabezal de limpieza acoplado giratoriamente (por ejemplo, un cabezal funcional acoplado para el movimiento funcional) a la carcasa del conjunto de limpieza, y un motor de accionamiento de limpieza situado en la carcasa del conjunto de limpieza y que funciona para accionar el cabezal de limpieza. Los conjuntos de ruedas y el conjunto de limpieza pueden extraerse por separado e independientemente cada uno de ellos de los receptáculos respectivos en el chasis en forma de cartuchos o unidades completas. Los receptáculos pueden ser cavidades conformadas que tienen paredes receptoras que rodean y guían la adaptación de las formas de la pared externa de un cartucho o módulo, de manera que cada módulo se desliza en y se adapta en una cavidad conformada correspondiente. Paralelas a al menos una dirección (por ejemplo, la de inserción), las paredes del modelo y la cavidad conformada correspondiente pueden ser esencialmente paralelas, de manera que se guía a un módulo para que entre en una cavidad conformada de adaptación a lo largo de una línea recta. Los módulos pueden asegurarse en el chasis mediante sujeciones y/o una cubierta de acceso o retención.
En una realización práctica, cada conjunto de rueda motriz incluye también una conexión que suspende la rueda desde una parte delantera del chasis. Conectando un primer extremo de la conexión a una parte trasera del chasis y permitiendo que la rueda conectada a un segundo extremo de la conexión se mueva radialmente alrededor del primer extremo de la conexión y verticalmente con respecto al chasis, el robot puede atravesar umbrales y zonas de transición de una forma más fácil que un robot sin dicha conexión. La conexión facilita también una inclinación hacia delante del chasis como respuesta al par de torsión desde la rueda que también ayuda a que el robot atraviese umbrales y zonas de transición.
En otro ejemplo, el conjunto de rueda (modular o no modular) incluye al menos parte de un sensor de proximidad para detectar la ausencia de un suelo adyacente. El sensor de proximidad puede ser un par de emisor y receptor de infrarrojos (IR), donde el emisor y el receptor IR están localizados en cualquier lado de la rueda y están situados para emitir y recibir un rayo IR emitido a un ángulo que se refleja desde una superficie del suelo por debajo de la rueda. En ausencia del suelo, el rayo IR emitido no se refleja desde el suelo y no se recibe en el receptor IR. Cuando el sensor de proximidad detecta la ausencia del suelo, esto se notifica a un controlador del robot de manera que se inicia una maniobra para evitar que se precipite por un hueco.
En una realización práctica, cada conjunto de rueda incluye también un conector eléctrico dispuesto en una superficie externa de la carcasa del conjunto de rueda motriz y configurado para adaptarse con un conector eléctrico del chasis correspondiente dentro de su receptáculo respectivo cuando el conjunto de rueda motriz se sitúa dentro del receptáculo, para establecer una conexión eléctrica con el conjunto de rueda. De forma similar, el conjunto de limpieza puede incluir un conector eléctrico dispuesto en una superficie externa de la carcasa del conjunto de limpieza y configurado para adaptarse con un conector eléctrico del chasis correspondiente dentro de su receptáculo respectivo cuando el conjunto de limpieza se sitúa dentro del receptáculo, para establecer una conexión eléctrica con el conjunto de limpieza. Los conectores pueden alinearse entre sí en una línea recta como un módulo que se guía para entre en una cavidad conformada de adaptación a lo largo de una línea recta.
En algunas realizaciones prácticas, el conector eléctrico para cada módulo es un enchufe eléctrico en el lado del módulo que funciona sin herramientas (que puede funcionar sin herramientas) que se adapta a un enchufe eléctrico en el lado del módulo que funciona sin herramientas en el chasis.
En un ejemplo, el robot de limpieza incluye también una batería eléctrica o una celda electroquímica situada en el chasis. La batería eléctrica proporciona energía al robot.
En otro ejemplo, el robot de limpieza incluye un conjunto de rueda orientable extraíble dispuesto en el chasis. El conjunto de rueda orientable extraíble proporciona un soporte adicional entre el robot y el suelo.
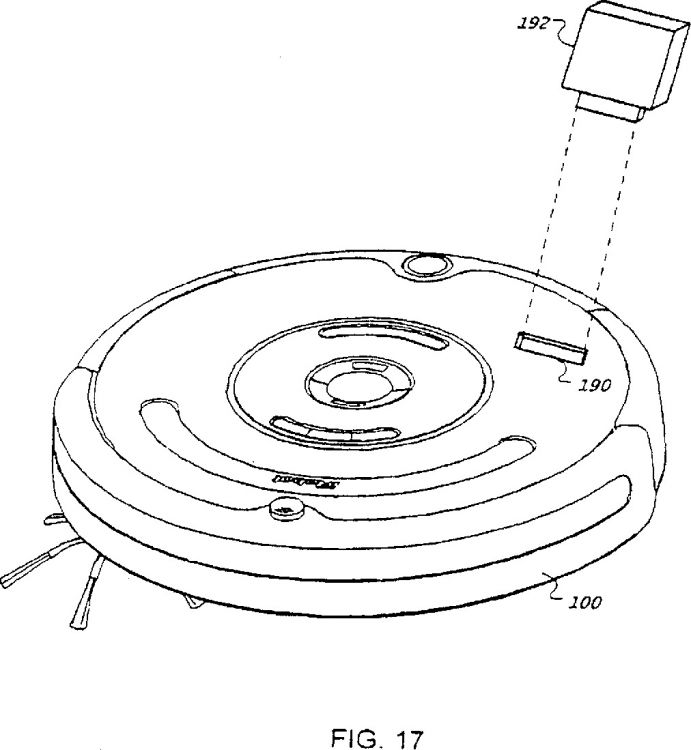
En otro ejemplo, el robot incluye una cubierta extraíble (por ejemplo, una cubierta de retención o de acceso) asegurada a una parte inferior del chasis. La cubierta asegura cada conjunto de rueda y conjunto de limpieza dentro de sus receptáculos respectivos. El robot puede incluir también una cubierta extraíble (por ejemplo, un panel estético o funcional, por ejemplo, como se describe en la Solicitud de Patente Provisional de Estados Unidos Nº 60/741.422, que se incorpora a este documento como referente en su totalidad) dispuesta sobre una parte superior del chasis. La cubierta extraíble en la parte superior del chasis permite a un propietario unir cubiertas o paneles temáticos o funcionales que tienen diversos colores y marcas; o, por ejemplo, sensores adicionales, por ejemplo, de navegación o de detección obstáculos. En un caso, la cubierta extraíble incluye un panel de visualización de mantenimiento segmentado que mimetiza sustancialmente el aspecto del robot. Las marcas iluminables que corresponden a cada receptáculo del módulo se disponen en la pantalla de mantenimiento segmentada. Los receptáculos de módulo corresponden individualmente a un conjunto de rueda motriz, un conjunto de limpieza, la batería o la papelera de limpieza, respectivamente. En otro caso, la cubierta...
Reivindicaciones:
1. Un robot de amplia cobertura (100) que comprende:
2. El robot de la reivindicación 1, que comprende adicionalmente una cubierta extraíble (118) asegurada a una parte inferior del chasis (202) y que asegura cada conjunto de rueda (110a-b) y conjunto de limpieza (112, 102) dentro de sus receptáculos respectivos (304, 306, 308, 310).
3. El robot de la reivindicación 1 o la reivindicación 2, en el que cada conjunto de rueda (110a-b) comprende adicionalmente un conector eléctrico (1002a-b) dispuesto sobre una superficie externa de la carcasa del conjunto de rueda motriz (324a-b) y configurado para adaptarse a un conector eléctrico del chasis (204, 206) correspondiente dentro de su receptáculo respectivo (304; 306) cuando el conjunto de rueda motriz (110a-b) se sitúa dentro del receptáculo (304; 306) para establecer una conexión eléctrica con el conjunto de rueda (110a-b).
4. El robot de cualquiera de las reivindicaciones anteriores, en el que el conjunto de limpieza (112, 102) comprende adicionalmente un conector eléctrico (1402, 410) dispuesto sobre una superficie externa de la carcasa del conjunto de limpieza (332, 338) y configurado para adaptarse a un conector eléctrico del chasis correspondiente (208, 210) dentro de su receptáculo respectivo (308, 310) cuando el conjunto de limpieza (112, 102) se sitúa dentro del receptáculo (308, 310), para establecer una conexión eléctrica con el conjunto de limpieza (112, 102).
5. El robot de cualquiera de las reivindicaciones anteriores, que comprende adicionalmente una batería eléctrica (302) situada en el chasis (202) y/o que comprende adicionalmente un conjunto de rueda orientable extraíble (114) dispuesta sobre el chasis (202).
6. El robot de cualquiera de las reivindicaciones anteriores, en el que cada uno del conjunto de rueda motriz (110a-b) comprende adicionalmente una conexión (330a-b) que suspende la rueda (326a-b) desde una parte delantera del chasis (202) y/o que comprende adicionalmente un sensor de proximidad (808) configurado para detectar una ausencia de un suelo adyacente.
7. El robot de cualquiera de las reivindicaciones anteriores, que comprende adicionalmente una cubierta amovible (104) dispuesta sobre una parte superior del chasis (202) y/o que comprende adicionalmente un parachoques extraíble (108) dispuesto en una parte delantera del chasis (202).
8. El robot de cualquiera de las reivindicaciones anteriores, que comprende adicionalmente una papelera de limpieza (116) situada en el chasis (202) y dispuesta para recoger los desechos retirados de una superficie de trabajo mediante el cabezal de limpieza (112).
9. El robot de la reivindicación 8, en el que la papelera de limpieza (116) comprende:
10. El robot de la reivindicación 9, en el que la papelera de limpieza (116) comprende adicionalmente un accionador de resorte de la cubierta de la papelera (611, 706) que desvía la cubierta de la papelera (609, 702) a la posición abierta y/o que comprende adicionalmente un pestillo para mantener la cubierta de la papelera desviada (609, 702) en la posición cerrada.
11. El robot de la reivindicación 1, en el que:
12. El robot de la reivindicación 11, en el que el panel de visualización (105) comprende adicionalmente un dispositivo de salida de audio (160) controlado por el controlador (1050).
13. El robot de la reivindicación 1, en el que:
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]