PROCEDIMIENTO Y SISTEMA DE DETECCION DE OBJETOS EN MOVIMIENTO.
Procedimiento de detección del paso de vehículos (7) por una vía,
caracterizado porque comprende efectuar de modo repetitivo al menos las siguientes operaciones: adquirir, al menos, un par de imágenes homólogas simultáneas de la vía; restar, para cada píxel de una de las imágenes homólogas simultáneas, el valor del píxel homólogo en la otra imagen homóloga simultánea localizando su posición mediante la función de correspondencia; comparar, los valores obtenidos en la operación anterior con un valor umbral predeterminado, obteniéndose el número de discrepancias; determinar, en función del número de discrepancias, si se produce una detección, donde la función correspondencia, que relaciona la posición de los píxeles de una imagen homóloga con la posición de los píxeles de la otra imagen homóloga, se calcula en una operación previa de inicialización utilizando elementos fijos de la vía como puntos de referencia
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200703498.
Solicitante: IMAGSA TECHNOLOGIES, S.A.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: LISA MINGO,FERRAN.
Fecha de Solicitud: 31 de Diciembre de 2007.
Fecha de Publicación: .
Fecha de Concesión: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G06T7/00P
- G08G1/017A
- G08G1/01B
Clasificación PCT:
- G06T7/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G08G1/01 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Detección del movimiento del tráfico para el cómputo o el control (G08G 1/07 - G08G 1/14 take precedence; tarificación vial o tarifa por congestión de vehículos o usuarios de vehículos G07B 15/06).
- G08G1/017 G08G 1/00 […] › por identificación de los vehículos (G08G 1/015, G08G 1/054 tienen prioridad).
- G08G1/052 G08G 1/00 […] › con disposiciones para determinar la velocidad o el exceso de velocidad.
Fragmento de la descripción:
Procedimiento y sistema de detección de objetos en movimiento.
Objeto de la invención
El objeto principal de la presente invención es un procedimiento y un dispositivo que detectan el paso de vehículos por una vía. Otro objeto de la presente invención es un procedimiento y un dispositivo que además determinan la longitud, altura y velocidad de los vehículos.
Antecedentes de la invención
El análisis y control de tráfico rodado es una necesidad cada vez mayor en las sociedades avanzadas, en las que los problemas de movilidad suponen un gran coste económico y en las que los accidentes de tráfico suponen un enorme coste en vidas humanas.
Los sistemas avanzados de control de tráfico utilizan sistemas de visión artificial que estudian diferentes condiciones del tráfico en una escena analizando imágenes digitales. La captura de esas imágenes se produce en general con dos sistemas, uno que detecta el paso de un vehículo y otro que captura al menos una imagen digital de la escena.
El hecho de tener dos elementos en muchos casos supone una gran complejidad de instalación y mantenimiento. Además, los elementos que detectan el paso de los vehículos suelen ser costosos, ya que se trata de elementos de mucha precisión, como por ejemplo radares, o de elementos intrusivos, cuya instalación requiere la ejecución de obras en la calzada con la consiguiente interrupción del tráfico.
También se han propuesto sistemas no intrusivos basados en ultrasonidos y en microondas. Este tipo de sistemas suele presentar problemas relacionados con falta de precisión o excesiva dependencia de las condiciones de entorno en la carretera. Como alternativa a estos elementos se han creado detectores ópticos que interpretan los cambios en la escena como indicadores del paso de un vehículo, pero su uso queda muy limitado al ser excesivamente sensibles a cambios en la iluminación ambiental (provocados por el paso de nubes, por las luces y las sombras producidas por otros coches, por elementos externos a la carretera, etc.), y por ser muy sensibles a las vibraciones, lo que imposibilita su instalación sobre semáforos, farolas, puentes o pórticos.
Descripción de la invención
La presente invención se refiere a un procedimiento y un dispositivo que resuelven la problemática anterior en un único aparato que detecta el paso del vehículo y toma imágenes de alta resolución para su posterior identificación. La detección del vehículo soluciona las deficiencias de otros sistemas de detección por visión artificial, ya que utiliza un algoritmo que analiza la altura de los objetos, lo que le permite descartar los brillos y las sombras en la calzada que confundirían a otros métodos, y realiza un filtrado de las imágenes.
El método también es totalmente insensible a las vibraciones, ya que trabaja con imágenes estáticas ("instantáneas") en lugar de vídeo, lo que facilita su instalación en cualquier elemento disponible en la vía pública (farolas, semáforos, puentes, pórticos, etc.).
Otra ventaja importante del método es que ha sido concebido para trabajar a muy alta velocidad, lo cual posibilita la detección de vehículos independientemente de su velocidad, y para ser fácilmente integrado en un circuito integrado de aplicación específica (ASIC) u otro dispositivo análogo, lo que posibilita su fabricación a gran escala y muy bajo coste.
El método utilizado para la detección de vehículos en la vía se basa en la estimación de la altura de éstos mediante un sistema que contiene dos o más medios de adquisición de imágenes. Comparando las imágenes adquiridas se detectan discrepancias entre píxeles homólogos de las imágenes homólogas, deduciéndose la existencia de objetos con altura no nula.
En el presente documento, se entenderá que "vía" hace referencia cualquier tipo de camino, calzada, carretera, etc. por la que pasen vehículos cuyas características se desea conocer. De igual modo, el término "vehículo" no se limita sólo a los coches, ya que el presente procedimiento y sistema son capaces de detectar el paso de cualquier objeto de altura no nula, como motocicletas, animales, personas a pie, etc.
Además, diremos que un "punto" corresponde a una parte de un vehículo, carretera, etc. en el mundo real, en contraposición con los puntos de los que están compuestas las imágenes, a los que haremos referencia como píxeles. Además, se entenderá que el "valor de un píxel" hace referencia a un valor de luminosidad de dicho píxel.
Por tanto, de acuerdo con un aspecto de la presente invención, se proporciona un procedimiento de detección del paso de vehículos por una vía que comprende las dos fases siguientes:
Fase 1
Se realiza por lo menos una vez como inicialización del sistema y consiste en analizar, al menos en un par de imágenes homólogas simultáneas, la posición de la carretera, y establecer una referencia de la distancia a la que se encuentra la calzada para cada píxel de la imagen. Esta primera fase comprende las siguientes operaciones:
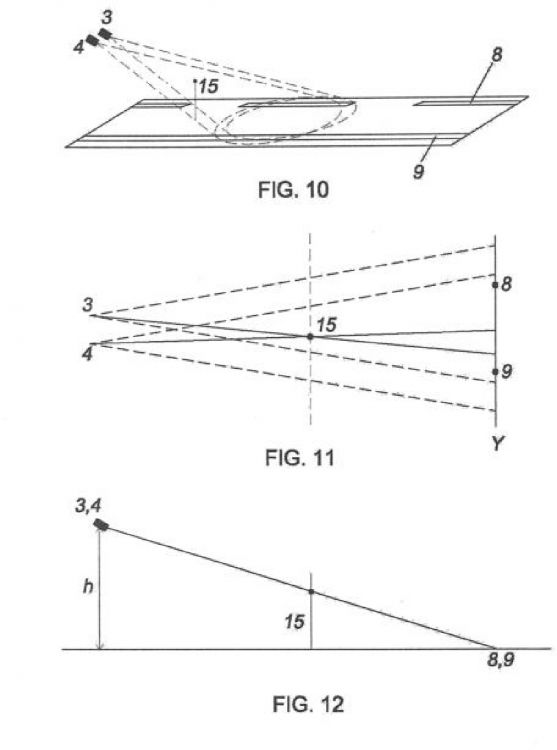
a) Adquirir, al menos, un par de imágenes homólogas simultáneas de la vía sin vehículos mediante dos medios de adquisición de imágenes separados horizontalmente. Diremos que dos "imágenes homólogas" son dos imágenes de la misma zona de la vía desde dos puntos de vista separados en dirección horizontal una distancia correspondiente a la distancia que separa los medios de adquisición de imágenes. Los medios de adquisición de imágenes obtienen imágenes de la vía al recibir la radiación en ella reflejada, por ejemplo la radiación natural visible.
b) Generar un modelo de la vía mediante el análisis de las correspondencias entre los píxeles de las imágenes homólogas simultáneas adquiridas en el paso anterior mediante alguna técnica de análisis de correspondencias entre imágenes, por ejemplo utilizando para ello puntos de referencia fijos de la vía. Este modelo es una función de correspondencia O: R2
Fase 2
Se realiza de forma repetitiva y consiste en detectar objetos que alteran la situación establecida en el modelo obtenido en la primera fase. En esta segunda fase se realizan al menos las siguientes operaciones:
a) Adquirir, al menos, un par de imágenes homólogas simultáneas de la vía mediante los dos medios de adquisición de imágenes separados horizontalmente y detectar píxeles en las imágenes homólogas que no coincidan con el modelo establecido en la fase anterior, porque la distancia a la carretera en su posición sea diferente a la establecida. Dicho de otro modo, mientras no exista ningún vehículo en la vía el valor de un píxel será aproximadamente igual al de su homólogo, ya que ambos píxeles corresponderán al mismo punto, normalmente de la vía, y por lo tanto ambos tendrán la misma luminosidad. En cambio, cuando pase un vehículo de altura no nula, en algún momento se producirá una situación en que un píxel corresponderá a un punto de la vía, mientras que su píxel homólogo corresponderá un punto del vehículo. En esta situación, la resta de los valores de este par de píxeles homólogos dará como resultado un valor superior a un valor umbral establecido, produciéndose una discrepancia. Por tanto, calculando la resta entre los valores de los píxeles de las dos imágenes homólogas, desplazando previamente los valores de los píxeles en una de ellas un número de píxeles proporcional al modelo O, y comparando los resultados con el valor umbral establecido, obtenemos el número de discrepancias. En el caso de que el número de discrepancias en esta operación supere un número máximo predefinido, concluimos que hay un objeto en la vía que no estaba presente en el momento de la generación del modelo (fase 1). De acuerdo con una realización preferida de la invención, para realizar este proceso a muy alta velocidad centramos nuestro análisis en regiones de las imágenes homólogas con forma de banda perpendicular a la vía.
b) En el caso de que el número de discrepancias detectadas en la operación anterior no sea superior al número máximo predefinido,...
Reivindicaciones:
1. Procedimiento de detección del paso de vehículos (7) por una vía, caracterizado porque comprende efectuar de modo repetitivo al menos las siguientes operaciones:
adquirir, al menos, un par de imágenes homólogas simultáneas de la vía mediante, al menos, dos medios de adquisición de imágenes (3, 4) separados horizontalmente;
restar, mediante un medio de procesamiento (5), para cada píxel de una de las imágenes homólogas simultáneas, el valor del píxel homólogo en la otra imagen homóloga simultánea localizando su posición mediante la función de correspondencia O;
comparar, mediante el medio de procesamiento (5), los valores obtenidos en la operación anterior con un valor umbral predeterminado, obteniéndose el número de discrepancias;
determinar, mediante el medio de procesamiento (5), en función del número de discrepancias, si se produce una detección,
donde la función correspondencia O, que relaciona la posición de los píxeles de una imagen homóloga con la posición de los píxeles de la otra imagen homóloga, se calcula en una operación previa de inicialización mediante alguna técnica de análisis de correspondencias entre imágenes utilizando elementos fijos de la vía como puntos de referencia.
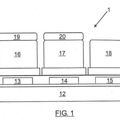
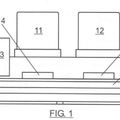
2. Procedimiento de detección del paso de vehículos por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque la operación de restar para cada píxel el valor de su píxel homólogo se realiza en regiones de análisis con forma de banda (12, 13, 14) perpendicular a la vía.
3. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con la reivindicación anterior, caracterizado porque las operaciones anteriores se realizan 50 o más veces por segundo.
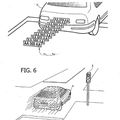
4. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además la operación de emitir en dirección a la vía, mediante un medio emisor de radiación (2), una radiación adecuada para el funcionamiento de los medios de adquisición de imágenes (3, 4).
5. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además la operación de determinar la hora en que se realiza una detección.
6. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además determinar el lugar geográfico que el que se realiza una detección.
7. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además la operación de comunicar los resultados obtenidos mediante un medio de comunicación (6).
8. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende la operación de encriptar los resultados previamente a su envío mediante el medio de comunicación (6).
9. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además la operación de determinar la altura del vehículo (7) detectado.
10. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además la operación de determinar la longitud del vehículo (7) detectado.
11. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque comprende además la operación de determinar la velocidad del vehículo (7) detectado.
12. Procedimiento de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque se utilizan las líneas de señalización horizontal de la vía como puntos fijos de referencia para el cálculo de la función O.
13. Sistema (1) de detección del paso de vehículos (7) por una vía, caracterizado porque comprende los siguientes dispositivos:
dos medios de adquisición de imágenes (3, 4), que adquieren dos imágenes homólogas simultáneas;
un medio de procesamiento (5) conectado a los medios de adquisición de imágenes (3, 4), que resta, para cada píxel de una de las imágenes homólogas simultáneas, el valor del píxel homólogo en la otra imagen homóloga simultánea y determina, en función del número de discrepancias, si se produce una detección.
14. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con la reivindicación 13, donde los medios de adquisición de imágenes (3, 4) están separados horizontalmente una distancia entre 20 cm y 100 cm.
15. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13 ó 14, caracterizado porque además comprende un medio emisor de radiación (2), que emite en dirección a la vía radiación una radiación adecuada para los medios de adquisición de imágenes (3, 4).
16. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-15, caracterizado porque comprende además un sistema (67) de posicionamiento GPS para determinar la posición geográfica donde se produce una detección.
17. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-16, caracterizado porque comprende además un medio (66) para determinar la fecha y la hora en que se produce una detección.
18. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-17, caracterizado porque comprende además un medio de comunicación (6) para comunicar los resultados obtenidos.
19. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-18, caracterizado porque los medios de adquisición de imágenes (3, 4) se eligen de la siguiente lista: cámaras digitales, cámaras de vídeo digitales, cámaras infrarrojas, detectores de ultrasonidos y detectores de radar.
20. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-19, caracterizado porque el medio emisor de radiación emite radiación de un tipo de la siguiente lista: luz visible, luz infrarroja, ultrasonidos y radar.
21. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-20, caracterizado porque el medio de procesamiento (5) se elige de entre la siguiente lista: un microcontrolador, un ordenador, un ASIC, un DSP y una FPGA.
22. Sistema (1) de detección del paso de vehículos (7) por una vía de acuerdo con cualquiera de las reivindicaciones 13-21, caracterizado porque el medio de comunicación (5) se comunica mediante al menos uno de los modos de la siguiente lista: Internet, Ethernet, USB, RS232, RS485, Bluetooth, IEEE802.11b/g, Zigbee, radio, línea telefónica, UMTS, GSM o infrarrojos.
Patentes similares o relacionadas:
SISTEMA DE VIGILANCIA DEL TRÁFICO, del 9 de Febrero de 2012, de JENOPTIK ROBOT GMBH: Sistema de vigilancia de tráfico, compuesto por las unidades funcionales esenciales, por una unidad sensora para registrar un vehículo de carretera que circula por ejemplo […]
SISTEMA AUTOMATIZADO DE MONITORIZACIÓN Y COMUNICACIÓN DE INFRACCIONES DE TRÁFICO, del 23 de Agosto de 2011, de REDFLEX TRAFFIC SYSTEMS PTY LTD: Sistema que comprende un sistema de cámaras para producir pruebas primarias de una infracción de tráfico en una ubicación de tráfico, comprendiendo el sistema de cámaras […]
PROCEDIMIENTO DE IDENTIFICACION DE OBJETOS REFLECTANTES SOMETIDOS A CONDICIONES DE ILUMINACION VARIABLE Y SISTEMA PARA LLEVAR A CABO DICHO PROCEDIMIENTO, del 18 de Agosto de 2011, de IMAGSA TECHNOLOGIES, S.A: Procedimiento de identificación de objetos reflectantes sometidos a condiciones de iluminación variable y sistema para llevar a cabo dicho procedimiento.Procedimiento […]
 PROCEDIMIENTO PARA LA DOCUMENTACIÓN DE INFRACCIONES DE TRÁFICO PRACTICAMENTE SIMULTANEAS, del 4 de Marzo de 2011, de JENOPTIK ROBOT GMBH: Procedimiento para la documentación de infracciones de tráfico prácticamente simultáneas, en el que de un primer vehículo , que circula por una […]
PROCEDIMIENTO PARA LA DOCUMENTACIÓN DE INFRACCIONES DE TRÁFICO PRACTICAMENTE SIMULTANEAS, del 4 de Marzo de 2011, de JENOPTIK ROBOT GMBH: Procedimiento para la documentación de infracciones de tráfico prácticamente simultáneas, en el que de un primer vehículo , que circula por una […]
 SISTEMA PARA DETECTAR VEHÍCULOS, del 17 de Febrero de 2011, de KRIA S.R.L: Un sistema para detectar el tránsito de vehículos (V) con matrículas (T), comprendiendo el sistema: - al menos una cámara de vídeo para detectar matrículas capaz de encuadrar […]
SISTEMA PARA DETECTAR VEHÍCULOS, del 17 de Febrero de 2011, de KRIA S.R.L: Un sistema para detectar el tránsito de vehículos (V) con matrículas (T), comprendiendo el sistema: - al menos una cámara de vídeo para detectar matrículas capaz de encuadrar […]
 SISTEMA Y METODO DE CAPTURA EN PARALELO DE IMAGENES, del 29 de Noviembre de 2010, de QUALITY INFORMATIONS SYSTEMS, S.A: Sistema de captura en paralelo de imágenes que comprende, al menos:unos primeros medios de captura de imágenes , fijados de forma solidaria mediante […]
SISTEMA Y METODO DE CAPTURA EN PARALELO DE IMAGENES, del 29 de Noviembre de 2010, de QUALITY INFORMATIONS SYSTEMS, S.A: Sistema de captura en paralelo de imágenes que comprende, al menos:unos primeros medios de captura de imágenes , fijados de forma solidaria mediante […]
 SISTEMA Y METODO DE CAPTURA Y ASOCIACION DE IMAGENES, del 10 de Junio de 2010, de QUALITY INFORMATIONS SYSTEM, S.A.: Sistema y método de captura y asociación de imágenes.
Sistema de captura y asociación de imágenes que comprende, al menos:
un primer sensor […]
SISTEMA Y METODO DE CAPTURA Y ASOCIACION DE IMAGENES, del 10 de Junio de 2010, de QUALITY INFORMATIONS SYSTEM, S.A.: Sistema y método de captura y asociación de imágenes.
Sistema de captura y asociación de imágenes que comprende, al menos:
un primer sensor […]
EVALUACIÓN DE CONDICIONES DE TRÁFICO DE CARRETERA UTILIZANDO DATOS DE FUENTES MÓVILES DE DATOS, del 2 de Febrero de 2012, de INRIX, INC: Un método implementado en ordenador para evaluar muestras de datos que representan vehículos que se desplazan por carreteras, el método comprende: recibir indicaciones […]