PROCEDIMIENTO DE IDENTIFICACION DE OBJETOS REFLECTANTES SOMETIDOS A CONDICIONES DE ILUMINACION VARIABLE Y SISTEMA PARA LLEVAR A CABO DICHO PROCEDIMIENTO.
Procedimiento de identificación de objetos reflectantes sometidos a condiciones de iluminación variable y sistema para llevar a cabo dicho procedimiento.
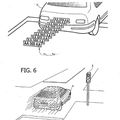
Procedimiento de identificación de objetos (1) reflectantes sometidos a condiciones de iluminación variable por captura y tratamiento de imágenes obtenidas con una cámara, que comprende las etapas de realizar una predicción de condiciones de iluminación susceptibles de afectar a la calidad de las imágenes obtenidas, adaptar el tiempo de exposición y/o la abertura de la cámara (2) a dichas condiciones de iluminación predichas, obtener mediante la cámara (2) al menos una imagen del objeto reflectante, en el que la predicción de las condiciones de iluminación comprende las subetapas de, determinar el acimut (Az) de la dirección del objetivo de la cámara (2), su posición geográfica, la hora universal, y a partir de estos, realizar una predicción de la radiación solar reflejada para adaptar el tiempo de exposición y/o la abertura de la cámara (2) con vistas a identificar el objeto (1)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930077.
Solicitante: IMAGSA TECHNOLOGIES, S.A.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: LISA MINGO,FERRAN.
Fecha de Solicitud: 20 de Abril de 2009.
Fecha de Publicación: .
Fecha de Concesión: 5 de Agosto de 2011.
Clasificación Internacional de Patentes:
- G06K9/00V
- G06K9/32R
- G06K9/32R1T
- G08G1/017A
Clasificación PCT:
- G06K9/00 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G06K9/32 G06K […] › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Alimentación o centrado del captador de imagen o de la zona de imagen.
- G08G1/017 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › por identificación de los vehículos (G08G 1/015, G08G 1/054 tienen prioridad).
- G08G1/054 G08G 1/00 […] › fotografiando los vehículos en exceso de velocidad.
Fragmento de la descripción:
Procedimiento de identificación de objetos reflectantes sometidos a condiciones de iluminación variable y sistema para llevar a cabo dicho procedimiento.
La presente invención se refiere a un procedimiento de identificación de objetos reflectantes sometidos a condiciones de iluminación variable y a un sistema para llevar a cabo dicho procedimiento, que permiten identificar objetos por captura de imágenes con cámaras en condiciones de iluminación fuertemente variables.
Antecedentes de la invención
Son conocidos los procedimientos de identificación de objetos reflectantes sometidos a condiciones de iluminación variable por captura y tratamiento de imágenes obtenidas de dichos objetos reflectantes por al menos una cámara.
En condiciones de iluminación variable, una buena calidad de imagen se obtiene adaptando convenientemente los parámetros del objetivo, como son la abertura del objetivo y/o el tiempo de exposición. Habitualmente, en cámaras de tipo CCD el objetivo permanece siempre abierto, realizándose el control de la exposición por control del tiempo de lectura y refresco de los píxeles de la cámara.
Sin embargo, cuando el objeto a identificar está en movimiento, por ejemplo matrículas de vehículos o bien rostros de personas, esta adaptación puede no ser lo suficientemente rápida para capturar a tiempo el objeto a identificar.
Una solución conocida consiste en determinar de manera automática los mejores parámetros para la captura en función de medidas de luminosidad de la escena que capturan.
Este método, ampliamente aceptado por la industria fotográfica, tiene limitaciones cuando se trata de analizar las imágenes de forma automática en los llamados sistemas de visión artificial.
En esos casos, los parámetros óptimos para la captura de una imagen de la escena no son necesariamente útiles para el análisis de la imagen.
En concreto, no son adecuados cuando los objetos o regiones de interés para la aplicación tienen unas condiciones de luminosidad muy diferentes de la luminosidad media de la escena.
Aunque existen aproximaciones tecnológicas orientadas a producir sensores de imagen con rango dinámico amplio, su objetivo es normalmente obtener la mejor imagen de la escena y no consiguen mostrar con calidad los objetos de interés en todas las situaciones.
La luminosidad ambiental es insuficiente para determinar el tiempo de exposición de la escena óptima para un objeto puesto que depende de los siguientes parámetros:
- La luminosidad ambiental de la escena, la cual depende de las fuentes de luz y de las reflexiones en otros elementos de la escena,
- La posición de la fuente de luz, por ejemplo, la posición del sol y/o
- El índice de reflectividad del objeto, la cual es muy diferente en un objeto oscuro y mate que en un objeto claro y brillante.
Se han propuesto diversas soluciones para dar solución a este inconveniente, las cuales consisten en general en aplicar un procedimiento que comprende las etapas de:
- realizar una predicción de condiciones de iluminación susceptibles de afectar a la calidad de las imágenes obtenidas,
- adaptar el tiempo de exposición y/o la abertura de la cámara a dichas condiciones de iluminación predichas,
- obtener mediante la cámara al menos una imagen del objeto reflectante,
para posteriormente tratarlas con la finalidad de identificar el objeto buscado.
En general, si los requisitos de velocidad de respuesta del sistema, es decir la captura y tratamiento de imágenes, lo permite, se hace una hipótesis de rango de iluminación, para realizar múltiples tomas de imagen con diferentes tiempos de exposición, para luego seleccionar de forma automática las que ofrecen más información sobre el objeto a identificar.
Sin embargo, las nuevas aplicaciones, en especial en exteriores, suponen un reto debido a las variaciones extremas de la reflexión de la luz del Sol sobre objetos que se mueven a gran velocidad, que van desde la oscuridad total de noche en carreteras interurbanas hasta una radiación muy intensa en verano al mediodía.
Además, esta variabilidad de la luz queda localizada de modo que es prácticamente imposible ajustar correctamente los parámetros de la cámara para una medida media de la iluminación.
Como solución, se han propuesto soluciones basadas en sensores inteligentes que intentan anticipar las condiciones de reflexión de la luz sobre las matriculas, o bien sistemas basados en la utilización de un sensor de luz ambiental.
Estos sistemas de predicción se pueden completar con sistemas de multi-exposición, que emplean cámaras de capturas de imágenes a alta velocidad.
En estos sistemas, ya desarrollados por el solicitante, se dispone de un dispositivo FPGA conectado a una cámara de megapíxeles de alta velocidad. La combinación de estos dos elementos permite la adquisición y el análisis de un elevado número de imágenes, del orden de mil, para grupos de, por ejemplo, cuatro tiempos de exposición.
Este enfoque con multi-exposición permite disponer de un elevado número de imágenes de una misma escena con diferentes parámetros de exposición, de entre las cuales se escogen las mejores muestras desde el punto de vista de la identificación del objeto.
Esta técnica de multi-exposición se puede combinar con las técnicas de predicción antes mencionadas, para acotar los parámetros de la cámara, y por ejemplo seleccionar un grupo de tiempos de exposición y aumentar las probabilidades de obtener imágenes de calidad con vistas a identificar el objeto.
Ahora bien, a pesar de esta selección previa de rangos, el solicitante ha podido comprobar que con la tecnología disponible, la identificación del máximo número de objetos aún no es óptima, y por lo tanto considera necesario mejorar los siguientes actuales.
Descripción de la invención
Para ello, la presente invención propone con la presente invención solucionar el problema capturando a alta velocidad múltiples imágenes con diferentes tiempos de exposición y buscando los objetos en todas ellas mediante algoritmos de análisis de imagen, para finalmente construir una nueva imagen en la que todos los objetos de interés son visibles de forma óptima para la aplicación.
Concretamente, la invención alcanza los objetivos propuestos mediante un procedimiento de identificación de objetos reflectantes sometidos a condiciones de iluminación variable por captura y tratamiento de imágenes obtenidas de dichos objetos reflectantes por al menos una cámara, que comprende las etapas de:
- realizar una predicción de condiciones de iluminación susceptibles de afectar a la calidad de las imágenes obtenidas,
- adaptar el tiempo de exposición y/o la abertura de la cámara a dichas condiciones de iluminación predichas,
- obtener mediante la cámara al menos una imagen del objeto reflectante,
que se caracteriza por el hecho de que dicha predicción de las condiciones de iluminación susceptibles de afectar a la calidad de las imágenes obtenidas comprende las subetapas de,
- determinar el acimut de la dirección del objetivo de la cámara,
- determinar la posición geográfica de la cámara,
- determinar la hora universal,
y a partir de dicha orientación del objetivo de la cámara, de la posición geográfica de la cámara y de la hora universal, realizar una predicción de la radiación solar reflejada por dicho objeto en la dirección del objetivo de la cámara y adaptar el tiempo de exposición y/o la abertura de la cámara a dichas condiciones de iluminación predichas con vistas a identificar dicho objeto reflectante.
Con este procedimiento, se logra acotar en un rango mucho menor que con las técnicas conocidas, los parámetros de abertura del diafragma del objetivo y/o el tiempo de exposición que permitirán realizar imágenes con suficiente calidad desde el punto de vista de la identificación del objeto en cuestión.
Además, el dispositivo puede implementarse, como se verá más abajo en un dispositivo compacto, y con requerimientos de cálculo mínimos, puesto que la predicción del efecto de la reflexión sobre las imágenes captadas por la cámara...
Reivindicaciones:
1. Procedimiento de identificación de objetos reflectantes (1) sometidos a condiciones de iluminación variable por captura y tratamiento de imágenes obtenidas de dichos objetos reflectantes (1) por al menos una cámara (2), que comprende las etapas de:
- realizar una predicción de condiciones de iluminación susceptibles de afectar a la calidad de las imágenes obtenidas,
- adaptar el tiempo de exposición y/o la abertura de la cámara (2) a dichas condiciones de iluminación predichas,
- obtener mediante la cámara (2) al menos una imagen del objeto reflectante,
caracterizado por el hecho de que dicha predicción de las condiciones de iluminación susceptibles de afectar a la calidad de las imágenes obtenidas comprende las subetapas de,
- determinar el acimut (Az) de la dirección del objetivo de la cámara (2),
- determinar la posición geográfica de la cámara (2),
- determinar la hora universal,
y a partir de dicha orientación (Az) del objetivo de la cámara (2), de la posición geográfica de la cámara (2) y de la hora universal, realizar una predicción de la radiación solar reflejada por dicho objeto en la dirección del objetivo de la cámara (2) y adaptar el tiempo de exposición y/o la abertura de la cámara (2) a dichas condiciones de iluminación predichas con vistas a identificar dicho objeto reflectante (1).
2. Procedimiento según la reivindicación anterior, en el que además de determinar el acimut (Az) de la dirección del objetivo de la cámara (2), también se obtiene su inclinación con respecto al plano horizontal.
3. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que además se realiza una predicción de la orientación de la o de las superficies reflectantes del objeto.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que además se realiza previamente una hipótesis sobre el índice de reflexión de la o de las superficies reflectantes del objeto reflectante (1).
5. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que dicho objeto reflectante es la matrícula de un vehículo o cualquier otro objeto susceptible de ser identificado por obtención y tratamiento de imágenes.
6. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que previamente a las mencionadas subetapas se realiza una medición de la luminosidad ambiental media.
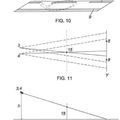
7. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que posteriormente a partir de la predicción de la radiación solar reflejada por dicho objeto se determina un conjunto de tiempos de exposición que permite cubrir los diferentes niveles de reflectividad del objeto.
8. Procedimiento según la reivindicación anterior, en el que a continuación se realiza la captura de una imagen para cada tiempo de dicho conjunto de tiempos.
9. Procedimiento según la reivindicación anterior, en el que a continuación se busca en la imagen el objeto, realizándose esta subetapa con un proceso de localización de patrones.
10. Procedimiento según la reivindicación anterior, en el que a continuación se transmiten las regiones de la imagen que contienen el objeto y su posición en el área de visión de la cámara.
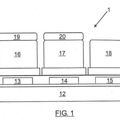
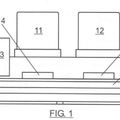
11. Sistema de identificación de objetos reflectantes (1) sometidos a condiciones de iluminación variable por captura y tratamiento de imágenes obtenidas de dichos objetos reflectantes (1) por al menos una cámara (2), que comprende medios para predecir condiciones de iluminación susceptibles de afectar a la calidad de las imágenes, comprendiendo dicha cámara medios de adaptación del tiempo de exposición y/o de la abertura de la cámara (2) a las condiciones de iluminación predichas, caracterizado por el hecho de que dichos medios para predecir condiciones de iluminación susceptibles de afectar a la calidad de las imágenes comprenden medios para determinar el acimut (Az) de la dirección del objetivo de la cámara (2), medios para determinar la posición geográfica de la cámara (2), medios para determinar la hora universal, los cuales permiten realizar una predicción de la radiación solar reflejada por dicho objeto reflectante (1) en la dirección del objetivo de la cámara (2) y por lo tanto acotar el tiempo de exposición y/o de la abertura de la cámara (2) para adaptarla en tiempo real según las condiciones de iluminación predichas.
12. Sistema según cualquiera de las dos reivindicaciones anteriores, en el que los medios para determinar el acimut (Az) son una brújula integrada en el sistema o bien una entrada que permite introducir dicho acimut (Az).
13. Sistema según la reivindicación anterior, en el que los medios para determinar la posición geográfica de la cámara (2) son un GPS integrado o bien una entrada que permite introducir dicha posición geográfica.
14. Sistema según la reivindicación anterior, que comprende medios para determinar la inclinación con respecto al plano horizontal del eje de visión de la cámara.
15. Sistema según cualquiera de las cuatro reivindicaciones anteriores, que comprende un módulo sensor de la iluminación ambiental.
16. Sistema según las reivindicaciones 12 y 13, en el que la brújula y el GPS están integrados en una misma placa electrónica o chip provisto de una entrada para las señales provenientes de la cámara, de una salida de control del tiempo de exposición y/o de la abertura de la cámara (2) y que está configurado para realizar dichas predicciones.
17. Sistema según la reivindicación anterior, en el que dicho chip está implementado con tecnología CMOS.
Patentes similares o relacionadas:
SISTEMA DE VIGILANCIA DEL TRÁFICO, del 9 de Febrero de 2012, de JENOPTIK ROBOT GMBH: Sistema de vigilancia de tráfico, compuesto por las unidades funcionales esenciales, por una unidad sensora para registrar un vehículo de carretera que circula por ejemplo […]
SISTEMA AUTOMATIZADO DE MONITORIZACIÓN Y COMUNICACIÓN DE INFRACCIONES DE TRÁFICO, del 23 de Agosto de 2011, de REDFLEX TRAFFIC SYSTEMS PTY LTD: Sistema que comprende un sistema de cámaras para producir pruebas primarias de una infracción de tráfico en una ubicación de tráfico, comprendiendo el sistema de cámaras […]
 PROCEDIMIENTO PARA LA DOCUMENTACIÓN DE INFRACCIONES DE TRÁFICO PRACTICAMENTE SIMULTANEAS, del 4 de Marzo de 2011, de JENOPTIK ROBOT GMBH: Procedimiento para la documentación de infracciones de tráfico prácticamente simultáneas, en el que de un primer vehículo , que circula por una […]
PROCEDIMIENTO PARA LA DOCUMENTACIÓN DE INFRACCIONES DE TRÁFICO PRACTICAMENTE SIMULTANEAS, del 4 de Marzo de 2011, de JENOPTIK ROBOT GMBH: Procedimiento para la documentación de infracciones de tráfico prácticamente simultáneas, en el que de un primer vehículo , que circula por una […]
 SISTEMA PARA DETECTAR VEHÍCULOS, del 17 de Febrero de 2011, de KRIA S.R.L: Un sistema para detectar el tránsito de vehículos (V) con matrículas (T), comprendiendo el sistema: - al menos una cámara de vídeo para detectar matrículas capaz de encuadrar […]
SISTEMA PARA DETECTAR VEHÍCULOS, del 17 de Febrero de 2011, de KRIA S.R.L: Un sistema para detectar el tránsito de vehículos (V) con matrículas (T), comprendiendo el sistema: - al menos una cámara de vídeo para detectar matrículas capaz de encuadrar […]
 SISTEMA Y METODO DE CAPTURA EN PARALELO DE IMAGENES, del 29 de Noviembre de 2010, de QUALITY INFORMATIONS SYSTEMS, S.A: Sistema de captura en paralelo de imágenes que comprende, al menos:unos primeros medios de captura de imágenes , fijados de forma solidaria mediante […]
SISTEMA Y METODO DE CAPTURA EN PARALELO DE IMAGENES, del 29 de Noviembre de 2010, de QUALITY INFORMATIONS SYSTEMS, S.A: Sistema de captura en paralelo de imágenes que comprende, al menos:unos primeros medios de captura de imágenes , fijados de forma solidaria mediante […]
 PROCEDIMIENTO Y SISTEMA DE DETECCION DE OBJETOS EN MOVIMIENTO, del 21 de Septiembre de 2010, de IMAGSA TECHNOLOGIES, S.A: Procedimiento de detección del paso de vehículos por una vía, caracterizado porque comprende efectuar de modo repetitivo al menos las siguientes […]
PROCEDIMIENTO Y SISTEMA DE DETECCION DE OBJETOS EN MOVIMIENTO, del 21 de Septiembre de 2010, de IMAGSA TECHNOLOGIES, S.A: Procedimiento de detección del paso de vehículos por una vía, caracterizado porque comprende efectuar de modo repetitivo al menos las siguientes […]
 SISTEMA Y METODO DE CAPTURA Y ASOCIACION DE IMAGENES, del 10 de Junio de 2010, de QUALITY INFORMATIONS SYSTEM, S.A.: Sistema y método de captura y asociación de imágenes.
Sistema de captura y asociación de imágenes que comprende, al menos:
un primer sensor […]
SISTEMA Y METODO DE CAPTURA Y ASOCIACION DE IMAGENES, del 10 de Junio de 2010, de QUALITY INFORMATIONS SYSTEM, S.A.: Sistema y método de captura y asociación de imágenes.
Sistema de captura y asociación de imágenes que comprende, al menos:
un primer sensor […]
DETECCIÓN AUTOMÁTICA DE FUEGOS SOBRE LA SUPERFICIE DE LA TIERRA Y DE FENÓMENOS ATMOSFÉRICOS TALES COMO NUBES, VELOS, BRUMAS O SIMILARES, POR MEDIO DE UN SISTEMA SATELITAL, del 5 de Septiembre de 2011, de TELESPAZIO S.P.A: Un método para detectar automáticamente fuegos sobre la superficie de la tierra por medio de un sistema satelital que comprende: - adquirir imágenes […]