SISTEMA PARA DETECTAR VEHÍCULOS.
Un sistema para detectar el tránsito de vehículos (V) con matrículas (T),
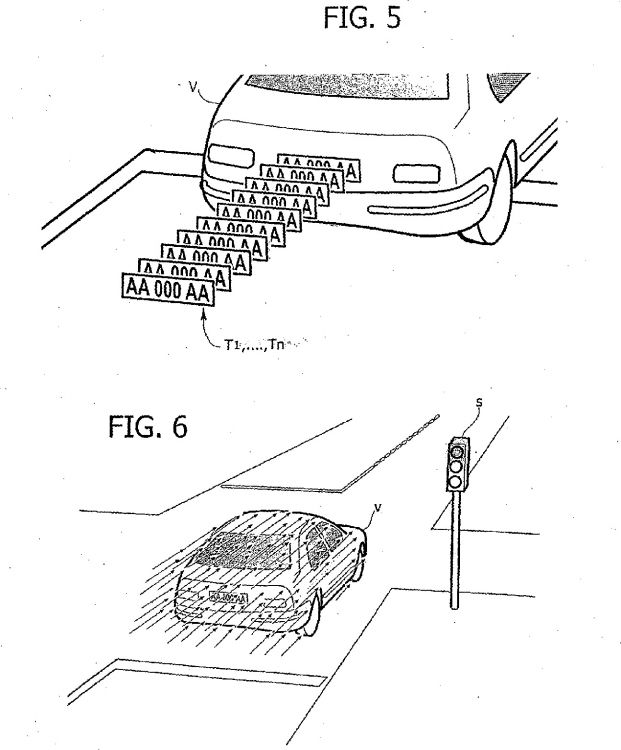
comprendiendo el sistema: - al menos una cámara de vídeo (12) para detectar matrículas capaz de encuadrar la matrícula de dichos vehículos y generar una señal de vídeo correspondiente, - una cadena de módulos de procesamiento (100-106) sensible a dicha señal de vídeo para llevar a cabo un procesamiento de reconocimiento de matrícula en dicha señal de vídeo; - al menos una cámara de vídeo adicional (14) para detectar vehículos capaz de encuadrar una zona (C) de tránsito de dichos vehículos (V) con matrículas y generar una señal de vídeo correspondiente respectiva, y - una cadena respectiva de módulos de procesamiento (200-206) sensible a la señal de vídeo generada por la cámara de vídeo adicional (14) para llevar a cabo en dicha señal de vídeo respectiva un procesamiento de seguimiento de vehículos para detectar la posición y la forma tridimensional de vehículos que transitan en dicha zona, caracterizado porque dicha cadena de módulos de procesamiento (100-106) incluye un módulo de pruebas (102) para detectar la presencia de un vehículo (V) en transito llevando a cabo una prueba que verifica si una imagen de una matrícula persiste en una serie de imágenes (T1,..., Tn) de la señal de vídeo generada por la cámara de vídeo (12), y un módulo de seguimiento de matrículas (104) que se activa mediante dicho módulo de pruebas (102) cuando dicha prueba tiene un resultado positivo, donde el sistema incluye un módulo supervisor (300) que agrega los resultados de dichos módulos de procesamiento de reconocimiento de matrículas (100-106) y de dichos módulos de procesamiento de seguimiento de vehículos (200-206) para generar registros de información (304), identificando cada uno la modalidad de tránsito en dicha zona (C) de un vehículo (V) identificado mediante una matrícula dada sometida a seguimiento y reconocida por dicha cadena de procesamiento (100-106)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2007/000761.
Solicitante: KRIA S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA S. VITALE, 3 20038 SEREGNO ITALIA.
Inventor/es: ARRIGHETTI,STEFANO.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Marzo de 2007.
Fecha Concesión Europea: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G06K9/32R1T1
- G08G1/017A
- G08G1/04 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que utilizan detectores ópticos o ultrasónicos.
- G08G1/054 G08G 1/00 […] › fotografiando los vehículos en exceso de velocidad.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
Campo de la invención
La invención se refiere a sistemas para detectar vehículos y se ha desarrollado con particular atención a su posible uso en la detección de infracciones de normas de tráfico, por ejemplo no pararse cuando el semáforo está en rojo, superar los límites de velocidad, adelantamientos y accesos no permitidos.
Descripción de la tecnología conocida
Los sistemas de identificación automática de vehículos que infringen las normas de tráfico deben responder a los requisitos de detección fiable de infracciones y generar documentación clara; también deben garantizar la seguridad de los conductores y ser difíciles de manipular indebidamente.
Los sistemas existentes comprenden generalmente sensores de detección conectados a cámaras que, por ejemplo, capturan secuencias de dos fotografías fijas para demostrar el movimiento del vehículo que comete la infracción.
El tránsito se detecta normalmente mediante sensores de la presencia de un vehículo (bucles inductivos, láseres, radar, etc.), todos ellos dispositivos cuya instalación requiere en general que se detenga el tráfico y cuyo funcionamiento implica un mantenimiento caro. Hasta la fecha, estos sensores han representado una parte necesaria de los sistemas en cuestión, no existiendo alternativas tecnológicas que puedan garantizar un mejor rendimiento, o al menos el mismo rendimiento, en lo que se refiere a una detección fiable (es decir, la probabilidad de detectar correctamente infracciones) y una medición precisa de las variables cinemáticas del vehículo que comete la infracción (típicamente la posición y la velocidad en un instante de tiempo claramente especificado).
Sin embargo, se conoce la posibilidad de utilizar cámaras de vídeo como sensores de detección (véase, por ejemplo, los documentos WO-A-2004/100102 y US-A-2004/054513), pero esto solamente en términos puramente genéricos, no tratándose modos de realización específicos ni la fiabilidad ni precisión de las mediciones obtenidas, y no existiendo actualmente ningún modo de realización operativo de esa invención.
Un sistema que utiliza cámaras de vídeo para registrar el movimiento de un vehículo se describe en el documento WO 94/28377A.
También se sabe que la detección de vídeo basada en movimiento simple (detección de movimiento y/o los denominados "bucles virtuales") está sujeta frecuentemente a falsas alarmas en ausencia de otras observaciones que confirmen la detección.
Además, cuando se aplican al contexto de la detección de infracciones de tráfico, las técnicas en cuestión adquieren finalmente, hasta cierto punto, un perfil “forense”.
En las soluciones utilizadas actualmente, la documentación de la infracción se genera normalmente mediante cámaras que, después de detectar el vehículo, capturan algunas (dos) imágenes del suceso detectado mediante los sensores asociados a las mismas. Durante las horas de oscuridad, la ausencia de luz solar en el área de encuadre se sustituye iluminando el vehículo con un flash. Sin embargo, normalmente se refleja mucha más luz desde la matrícula que desde la carrocería del vehículo, por lo que el alcance dinámico de la luminancia de la escena es demasiado ancho para las capacidades de la cámara de vídeo (tanto si utiliza película fotográfica como si es de tipo digital) para permitir que se reconozcan al mismo tiempo tanto el área de la matrícula como el modelo y el color del vehículo, dando como resultado la generación de documentación que no puede utilizarse para procedimientos disciplinarios.
Una limitación evidente y específica de las cámaras analógicas radica en la longitud limitada del carrete, es decir, el pequeño número de fotografías que pueden tomarse; esto requiere que el personal visite frecuentemente la instalación para sustituir manualmente la película y revelarla, después de lo cual, si fuera necesario, las imágenes se capturan por un escáner para fines de clasificación.
Las cámaras digitales están empezando a sustituir a las que utilizan películas fotográficas, reduciendo parcialmente estos inconvenientes; sin embargo, comparten con las cámaras analógicas las limitaciones debidas al deterioro de las partes móviles (obturador, diafragma).
Además, todos los sistemas que utilizan cámaras no pueden documentar infracciones que tienen lugar en rápida sucesión; por ejemplo, no pueden documentar los frecuentes casos en los que un primer vehículo infractor en tránsito va seguido inmediatamente por otros vehículos, con un solapamiento de tiempo entre el final de una infracción de vehículo y el principio del vehículo siguiente.
Algunos sistemas basados en cámaras de vídeo (por lo tanto con una captura continua de imágenes) tienen una limitación más evidente cuando funcionan en condiciones de poca iluminación, en particular con respecto a la legibilidad de la matrícula. Para evitar el efecto “borroso” del vehículo en movimiento, funcionan con un tiempo de exposición muy corto y con la ayuda de un flash, utilizando de este modo la cámara de vídeo solamente para capturar algunas imágenes, en la manera de una cámara normal.
Algunos sistemas proporcionan una lectura automática de la matrícula para integrar la documentación fotográfica con información necesaria para la posterior identificación del propietario del vehículo. En general, esta lectura no se utiliza como una alternativa a los sensores mencionados anteriormente para detectar el suceso; el procesamiento posterior es simplemente complementario a la documentación, llevándose a cabo después de que se haya detectado el vehículo y se hayan adquirido las imágenes.
Un requisito adicional que debe tenerse en cuenta consiste en el hecho de que los sistemas que registran infracciones deben responder a estrictos requisitos de seguridad. En particular, no deben tener una influencia negativa en la conducción, considerando por encima de todo las peligrosas condiciones intrínsecas a la maniobra o al lugar por donde está pasando el conductor.
Por ejemplo, la repentina iluminación del flash se discute frecuentemente ya que se considera potencialmente peligrosa por el riesgo asociado de deslumbramiento; incluso si el sistema fotografía el vehículo "detectado" desde atrás, un conductor que avance en el sentido contrario al controlado puede quedar deslumbrado por el mismo.
De nuevo, en vista de que su utilización actual es principalmente disciplinaria, los sistemas de detección están expuestos a actos de vandalismo: esto se debe también al hecho de que tales sistemas no están vigilados normalmente. Actos típicos de manipulación indebida consisten en desactivar los sensores de detección y cubrir (o tapar) los dispositivos de captura de imágenes.
Objeto y resumen de la invención
A partir de la descripción de la tecnología conocida proporcionada anteriormente, emerge la necesidad de disponer de sistemas de detección que no tengan las limitaciones y desventajas indicadas anteriormente y que, en particular:
- no requieran parar el tráfico durante la instalación y/o no requieran un mantenimiento caro durante su funcionamiento;
- sean completamente fiables en lo que respecta a la correcta detección de infracciones (en particular con respecto a falsas alarmas) y a la precisión en la medición de las variables cinemáticas del vehículo infractor;
- no tengan los inconvenientes técnicos relacionados intrínsicamente con la utilización de cámaras (ya sean de tipo analógico o de tipo digital) y del flash;
- permitan la detección y la documentación de infracciones que tengan lugar en rápida sucesión; -sean capaces de funcionar en condiciones de poca iluminación, en
particular con respecto a la legibilidad de la matrícula; -no puedan considerarse como una influencia negativa en la conducción; -estén protegidos intrínsecamente contra (o que al menos estén poco
expuestos a) actos de vandalismo.
La presente invención tiene como objetivo satisfacer completamente estas necesidades.
Según la presente invención, este objeto se consigue gracias a un sistema que presenta características recogidas específicamente en las reivindicaciones posteriores.
Las reivindicaciones forman una parte integrante de las enseñanzas técnicas aquí proporcionadas con relación...
Reivindicaciones:
1. Un sistema para detectar el tránsito de vehículos (V) con matrículas (T), comprendiendo el sistema:
- al menos una cámara de vídeo (12) para detectar matrículas capaz de encuadrar la matrícula de dichos vehículos y generar una señal de vídeo correspondiente,
- una cadena de módulos de procesamiento (100-106) sensible a dicha señal de vídeo para llevar a cabo un procesamiento de reconocimiento de matrícula en dicha señal de vídeo;
- al menos una cámara de vídeo adicional (14) para detectar vehículos capaz de encuadrar una zona (C) de tránsito de dichos vehículos (V) con matrículas y generar una señal de vídeo correspondiente respectiva, y
- una cadena respectiva de módulos de procesamiento (200-206) sensible a la señal de vídeo generada por la cámara de vídeo adicional (14) para llevar a cabo en dicha señal de vídeo respectiva un procesamiento de seguimiento de vehículos para detectar la posición y la forma tridimensional de vehículos que transitan en dicha zona, caracterizado porque dicha cadena de módulos de procesamiento (100-106) incluye un módulo de pruebas (102) para detectar la presencia de un vehículo (V) en transito llevando a cabo una prueba que verifica si una imagen de una matrícula persiste en una serie de imágenes (T1,..., Tn) de la señal de vídeo generada por la cámara de vídeo (12), y un módulo de seguimiento de matrículas (104) que se activa mediante dicho módulo de pruebas (102) cuando dicha prueba tiene un resultado positivo, donde el sistema incluye un módulo supervisor (300) que agrega los resultados de dichos módulos de procesamiento de reconocimiento de matrículas (100-106) y de dichos módulos de procesamiento de seguimiento de vehículos (200-206) para generar registros de información (304), identificando cada uno la modalidad de tránsito en dicha zona (C) de un vehículo (V) identificado mediante una matrícula dada sometida a seguimiento y reconocida por dicha cadena de procesamiento (100-106).
2. Sistema según la reivindicación 1, caracterizado porque dicha cámara de vídeo (12) para detectar matrículas y dicha cámara de vídeo (14) para detectar vehículos están incluidas en un único dispositivo de cámaras de vídeo de detección.
3. Sistema según la reivindicación 1, caracterizado porque dicha cámara de vídeo (12) para detectar matrículas y dicha cámara de vídeo (14) para detectar vehículos son dispositivos distintos.
4. Sistema según la reivindicación 1, caracterizado porque dicha cámara de vídeo (12) para detectar matrículas funciona en el espectro infrarrojo.
5. Sistema según la reivindicación 1, caracterizado porque dicha cámara de vídeo (12) para detectar matrículas está equipada con una lente de campo estrecho.
6. Sistema según la reivindicación 1, caracterizado porque dicha cámara de vídeo (14) para detectar vehículos es una lente de campo amplio que encuadra toda dicha zona (C) de tránsito de dichos vehículos (V) con matrículas.
7. Sistema según cualquiera de las reivindicaciones 1 ó 6, caracterizado porque dicha cámara de vídeo (14) para detectar vehículos es una cámara de vídeo en color, con la consiguiente posibilidad de detectar el estado de al menos una luz de los semáforos (S) adyacentes.
8. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado porque dicha cámara de vídeo (12) para detectar matrículas y/o dicha cámara de vídeo (14) para detectar vehículos
generan señales de vídeo dotadas de una marca de fecha/hora que identifica el instante en que fueron registradas.
9. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado porque:
- dicha cámara de vídeo (12) para detectar matrículas está acoplada a una cámara de vídeo homóloga (12') para detectar matrículas para generar una señal de vídeo homóloga correspondiente, y
- dicha cadena de procesamiento (100-106; 100'-106') es sensible a dicha señal de vídeo y a dicha señal de vídeo homóloga para llevar a cabo en dicha señal de vídeo y en dicha señal de vídeo homóloga un procesamiento estereométrico para determinar la velocidad de dicho vehículo (V) en tránsito.
10. Sistema según la reivindicación 1, caracterizado porque dicha cadena respectiva de procesamiento (200-206) sensible a dicha señal de vídeo respectiva está configurada para llevar a cabo en dicha señal de vídeo respectiva un procesamiento de tipo SFM o “Structure From Motion”.
11. Sistema según la reivindicación 1, caracterizado porque:
- dicha cámara de vídeo (14) para detectar vehículos está acoplada a una cámara de vídeo homóloga (14') para detectar vehículos y para generar una señal de vídeo homóloga respectiva, y
- dicha cadena respectiva de procesamiento (200-206; 200'-206') es sensible a dicha señal de vídeo respectiva y a dicha señal de vídeo homóloga respectiva para llevar a cabo un procesamiento estereométrico en dicha señal de vídeo respectiva y en dicha señal de vídeo homóloga respectiva para proporcionar una caracterización absoluta del movimiento y de la forma de dicho vehículo (V) en tránsito.
12. Sistema según la reivindicación 1, caracterizado porque dicho módulo supervisor (300) está configurado para sobreimprimir en las imágenes de dichos vehículos en tránsito (V) una representación vectorial con líneas cuya longitud es proporcional a la velocidad detectada y cuya dirección identifica la trayectoria de movimiento del vehículo.
13. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado porque dicha al menos una cámara de vídeo de detección (12, 12') está fijada a un soporte (1000), preferentemente a través de separadores de material elástico, y está protegida por una carcasa (1200) sin estar fijada a dicha carcasa (1200).
14. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado porque incluye un par de cámaras de vídeo de detección (12, 12'), siendo dicha cadena de procesamiento (100-106) capaz de detectar automáticamente cambios en la posición relativa entre las cámaras de vídeo (12, 12') de dicho par.
15. Sistema según la reivindicación 14, caracterizado porque dicha cadena de procesamiento (100-106) está configurada para detectar automáticamente cambios en la posición relativa entre las cámaras de vídeo (12, 12') de dicho par detectando la imposibilidad de cumplir con una limitación epipolar en la correspondencia entre puntos en los pares respectivos de imágenes.
Patentes similares o relacionadas:
Procedimiento para generar un registro digital y una unidad de carretera de un sistema de peaje de carreteras que implemente el procedimiento, del 5 de Febrero de 2020, de KAPSCH TRAFFICCOM AG: Un procedimiento para generar un registro digital (E) de un vehículo en un sistema de peaje de carreteras , que comprende, en una unidad de carretera del sistema […]
DISTANCIÓMETRO VIAL, del 7 de Agosto de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico que se caracteriza por ir instalado en un vehículo informando sobre la distancia de seguridad que se lleva en cada momento con respecto […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Dispositivo de peaje o sistemas telemáticos, del 3 de Abril de 2019, de KAPSCH TRAFFICCOM AB: Método para controlar un sistema de peaje que comprende una pluralidad de sensores de imagen, que pueden combinar la información entre sí para estimar una altura, una […]
Procedimiento de control de un sistema de vigilancia de tráfico, del 18 de Marzo de 2019, de KAPSCH TRAFFICCOM AB: Procedimiento para controlar un sistema de vigilancia de tráfico, en el que el sistema tiene una pluralidad de sensores (100a-100d) estereoscópicos […]
Sistema y métodos para el soporte de vehículos autónomos por medio de la percepción ambiental y calibración y verificación de sensores, del 6 de Marzo de 2019, de Signify Holding B.V: Un sistema de soporte para vehículo autónomo caracterizado por que comprende: una red de iluminación que tiene: una pluralidad de unidades […]
Sistema de vigilancia del comportamiento del tráfico, del 8 de Noviembre de 2018, de KAPSCH TRAFFICCOM AB: Un método para supervisar el comportamiento del tráfico entre una pluralidad de vehículos por medio de un dispositivo de cámara estereoscópica conectado […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]