CIP-2021 : G01C 21/00 : Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00;
control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
CIP-2021 › G › G01 › G01C › G01C 21/00[m] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
G01C 21/02 · mediante medios astronómicos (G01C 21/24, G01C 21/26 tienen preferencia).
G01C 21/04 · mediante medios terrestres (G01C 21/24, G01C 21/26 tienen preferencia).
G01C 21/06 · · que conllevan la medida del ángulo de deriva; que conllevan corrección por deriva.
G01C 21/08 · · que conllevan la utilización del campo magnético de la tierra.
G01C 21/10 · mediante la utilización de la medida de la velocidad o la aceleración (G01C 21/24, G01C 21/26 tienen preferencia).
G01C 21/12 · · ejecutadas a bordo del objeto que se hace navegar; Navegación a estima.
G01C 21/14 · · · mediante el registro del curso llevado por el objeto (G01C 21/16 tiene prioridad).
G01C 21/16 · · · mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
G01C 21/18 · · · · Plataformas estabilizadas, p. ej. mediante giróscopo.
G01C 21/20 · Instrumentos para efectuar cálculos de navegación (G01C 21/24, G01C 21/26 tienen preferencia).
G01C 21/22 · · Tableros de trazado.
G01C 21/24 · especialmente adaptados para la navegación astronáutica.
G01C 21/26 · especialmente adaptados para la navegación en una red de carreteras.
G01C 21/28 · · con correlación de datos provenientes de varios instrumentos de navegación.
G01C 21/30 · · · Comparación de planos o mapas topográficos.
G01C 21/32 · · · · Estructuración o formato de datos de mapas.
G01C 21/34 · · Búsqueda de rutas; guiado en ruta.
G01C 21/36 · · · Disposiciones de entrada/salida para ordenadores de a bordo.
CIP2021: Invenciones publicadas en esta sección.
(29/04/2020) Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área de corredor que tiene una longitud mayor que su ancho, no siendo el ancho necesariamente constante a lo largo de la trayectoria arbitraria , pudiéndose describir la trayectoria arbitraria parcialmente por una polilínea de trayectoria de corredor, no siendo la polilínea de trayectoria de corredor recta, comprendiendo el método:
(a) hacer volar una aeronave a lo largo de una línea de vuelo primaria, comprendiendo la línea de vuelo primaria una secuencia de segmentos rectos de línea de vuelo primaria, en donde la aeronave se hace volar nivelada a lo largo de cada segmento de línea de vuelo primaria , no estando…
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio.
(25/03/2020) Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema de navegación en base a radio con un vector de corrección derivado a partir de datos de localización almacenados en una base de datos del mapa, en el que el vector de corrección es calculado mediante;
(a) medición de coordenadas de posición del sistema de navegación en base a radio,
(b) seleccionar en base a las coordenadas de posición medidas de las coordenadas de posición del sistema de navegación en base a radio, un conjunto de datos de mapas en 3D para dichas coordenadas de posición medidas a partir de una base de datos del mapa,
(c) determinar a partir de los datos del mapa en 3D…
Sistema y método para medir un desplazamiento de una plataforma móvil.
(18/03/2020) Un metodo para detectar un desplazamiento de una plataforma movil, que comprende:
obtener un primer marco (811a) y un segundo marco (811b) con un dispositivo de generacion de imagen; y
determinar el desplazamiento de la plataforma movil con base en el primer marco (811a) y el segundo marco (811b),
en donde la obtencion comprende adquirir una altura de la plataforma movil,
en donde la obtencion comprende adquirir un angulo del dispositivo de generacion de imagen con respecto a un nivel de suelo,
en donde la adquisicion del angulo comprende adquirir el angulo a traves de una Unidad de Medicion Inercial ("IMU"), en donde la obtencion comprende ademas:
medir un angulo de rotacion de la plataforma movil con la IMU en relacion con el primer marco (811a) para generar datos de rotacion;
adquirir, con base en el primer marco…
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo.
(01/01/2020) Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende:
- una unidad de gestión configurada para seleccionar un grupo de capas de altitud, en donde el grupo comprende una capa de altitud inicial que comprende el origen y una capa de altitud final que comprende el destino;
la unidad de gestión está configurada además para generar un escenario horizontal 2D mediante la identificación de restricciones para impedir dentro de un rango en cada capa de altitud seleccionada;
- una unidad de cálculo de trayectoria configurada para determinar si una o más restricciones son comunes para las capas de altitud…
Navegación vehicular basada en datos de calidad de sensor específicos del sitio.
(23/10/2019) Un método para determinar la localización de un vehículo, el método que comprende:
determinar los datos de localización de recepción dentro de una celda de un área de trabajo para el vehículo;
estimar los datos de calidad de recepción para los datos de localización de recepción correspondientes para la celda, un receptor de determinación de localización que proporciona los datos de localización de recepción de la recepción de energía electromagnética transmitida desde balizas terrestres o de satélite;
determinar los datos de localización ópticos dentro de la celda del área de trabajo para el vehículo;
estimar los datos de calidad ópticos para los datos de localización ópticos correspondientes para la celda y seleccionar al menos uno de los datos de localización de recepción y los datos de…
Navegación basada en al menos un sensor y un mapa 3D.
(16/10/2019) Un procedimiento de navegación de un vehículo aéreo, comprendiendo el procedimiento la provisión de una imagen de sensor a partir de un sensor de vehículo aéreo y, de forma reiterada, hasta que al menos se alcance un criterio predeterminado , llevando a cabo las etapas siguientes:
- el ajuste de datos de entrada que comprenden informaciones relacionadas con el ángulo de cabeceo, el ángulo de balanceo, el ángulo de guiñada y la posición tridimensional del vehículo aéreo;
- la provisión de una imagen bidimensional a partir de una base de datos sobre la base de los datos de entrada, donde la base de datos comprende un mapa georreferenciado tridimensional del entorno o un modelo georreferenciado tridimensional…
Procedimiento de provisión de información de ruta y dispositivo electrónico para procesar el mismo.
(17/07/2019) Un procedimiento de operación de un dispositivo electrónico, que comprende:
determinar por al menos un sensor una ubicación presente como una primera ubicación en respuesta a la detección de que la detección del sistema de posicionamiento global, GPS, no está disponible por un sensor de GPS; adquirir información de movimiento por al menos un sensor cuando el dispositivo electrónico se mueve de la primera ubicación mientras la detección de GPS no está disponible; y caracterizado por
en respuesta a la detección de la reactivación de la detección del GPS por el sensor del GPS, determinar una nueva ubicación…
Múltiples grupos de control de enlace de radio (RLC).
(15/05/2019) Un equipo de usuario, UE, capaz de agregación de portadoras, CA, configurado para procesar el flujo de control de enlace de radio, RLC, dicho UE que comprende:
al menos un transceptor de radiofrecuencia, RF, del UE configurado para:
recibir paquetes de más de una célula a través de los transceptor de RF el nodo emisor,
en donde los transceptores de RF del nodo emisor incluyen un transceptor de RF de macrocélula y un transceptor de RF de célula pequeña; y
un procesador configurado para:
procesar unidades de datos de servicio, SDU, de los paquetes en una entidad de control de enlace de radio, RLC, de una pila de protocolos, PS, en donde cada una de las SDU está asociada con un identificador de flujo de RLC, RFI, en donde la operación de procesamiento…
Posicionamiento de un dispositivo con relación a una fuente de señal magnética.
(26/04/2019). Solicitante/s: Nokia Technologies OY. Inventor/es: KAMPPI,PAUL MIKAEL, MUTANEN,RISTO PETTERI, RAUTIAINEN,TERHI.
Un método que comprende:
- usar, en un proceso de posicionamiento, información de proceso de posicionamiento que es al menos una de información sobre una señal magnética detectada, información determinada basándose en dicha señal magnética detectada e información de identidad determinada basándose en datos medidos para detectar dicha señal magnética detectada, identificando dicha información de identidad una fuente de señal magnética, en donde dicha señal magnética detectada es producida por la fuente de señal magnética instalada en un entorno y detectada en un dispositivo,
en donde dicho proceso de posicionamiento es para posicionar dicho dispositivo en dicho entorno, y
en donde dicha información de proceso de posicionamiento usada en el proceso de posicionamiento es al menos dicha información de identidad y dicha información de identidad se usa en dicho proceso de posicionamiento para activar una conmutación entre al menos dos diferentes modos de posicionamiento.
PDF original: ES-2710624_T3.pdf
Procedimiento de seguimiento y control de una flota de drones de reparto de paquetes.
(11/04/2019). Solicitante/s: SANTOS GARCÍA, Francisco. Inventor/es: SANTOS GARCÍA,Francisco.
Procedimiento de seguimiento y control de una flota de drones de reparto de paquetes, mediante un sistema informático y un sistema controlador de rutas de los drones, que almacena los datos generados por cada uno de los drones en ficheros log ordenados en un sistema de ficheros y que mediante el concepto ELK almacena, procesa y visualiza la información y la utiliza, entre otros fines, para recalcular la ruta de cada uno de los drones para que de esta manera eviten las zonas geográficas prohibidas al vuelo de drones según una serie de parámetros predeterminados.
PDF original: ES-2708904_A1.pdf
Método y aparato para establecer rutas de buques transoceánicos para evitar entornos traicioneros.
(30/01/2019) Un método implementado por ordenador para generar una ruta para que un buque navegue desde un punto inicial hasta un punto final, comprendiendo el método implementado por ordenador:
identificar un punto inicial y un punto final para el buque;
obtener un pronóstico de las condiciones meteorológicas durante un período de tiempo;
obtener un modelo del buque, incluyendo el modelo los parámetros usados para calcular una respuesta del buque a las condiciones meteorológicas; y
generar una ruta desde el punto inicial hasta el punto final para que el buque navegue usando el modelo del buque y el pronóstico de las condiciones meteorológicas , usando el algoritmo de Dijkstra con una resolución angular mínima, que comprende considerar todos los puntos de cuadrícula vecinos dentro de un radio máximo y seleccionar…
SISTEMA DE POSICIONAMIENTO.
(10/01/2019) Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente distribuidos y una serie de unidades de rastreo , asociadas a cada jugador o usuario, de manera que los módulos espaciales están constituidos a partir de un panel de forma cuadrada, en la que se integran dos agrupaciones de diodos LED de diferente tipo, LEDs de referencia de espectro visible, y LEDs de identificación infrarrojos, incluyendo cada módulo espacial con medios de configuración para sus diodos de identificación así como medios de alimentación…
Extensor de montante de tren de aterrizaje.
(05/11/2018) Un método de incrementar la altura de desplazamiento sobre tierra de un avión mientras está en tierra, soportándose dicho avión por dos trenes de aterrizaje principales con montantes extensibles y un tren de morro, y teniendo un depósito con fluido hidráulico, y bombas respectivas para bombear fluido hidráulico desde dicho depósito a cada uno de dichos montantes extensibles cuando se desea una mayor altura de desplazamiento sobre tierra;
caracterizado porque:
dichas bombas están conectadas para bombear exclusivamente fluido hidráulico entre dicho depósito y dicho tren de aterrizaje principal,
y por los pasos de operación de las bombas para inyectar fluido hidráulico exclusivamente a los montantes extensibles de los dos trenes de aterrizaje principales…
Unidad de antena de vehículo.
(11/04/2018). Solicitante/s: CONTINENTAL TEVES AG & CO. OHG. Inventor/es: STÄHLIN,Ulrich, MENZEL,Marc, SCHÜRMEIER,MARTIN.
Unidad de antena de vehículo destinada a participar en la comunicación de vehículo a entono de conformidad con el estándar DSRC o ITS-G5, que comprende una antena de red ad hoc para emitir y recibir en el dominio de 5,9 GHz,
una antena de satélite para recibir señales de localización por satélite y
unos elementos excitadores que están concebidos para la emisión y/o la recepción con la antena de red ad hoc y la antena de satélite ,
una unidad de cálculo y una interfaz con otras unidades de vehículo,
caracterizada por que la unidad de cálculo está concebida para la evaluación de las señales de localización por satélite y para la participación autárquica de la unidad de antena en la comunicación de vehículo a entorno, a cuyo fin todos los pasos de procesamiento de una pila de protocolos de comunicación de vehículo a entorno de vehículo pueden ser ejecutados por la unidad de cálculo de manera autónoma y sin acceso a la interfaz.
PDF original: ES-2676405_T3.pdf
Sistema de telemetría, cartografía y planificación de trayecto interactivo para vehículo recreativo.
(04/04/2018) Un instrumento de indicación para un vehículo para fuera de carretera, comprendiendo el instrumento de indicación:
al menos un procesador;
una memoria accesible por el al menos un procesador;
un visualizador acoplado al procesador;
un enlace de datos inalámbrico acoplado al procesador para proporcionar comunicación entre el instrumento de indicación y un dispositivo móvil portátil de modo que el instrumento de indicación transmite información al dispositivo móvil portátil y recibe información del dispositivo móvil portátil; y
software almacenado en la memoria y configurado para ejecución por el al menos un procesador, comprendiendo el software instrucciones que proporcionan un menú seleccionable por el usuario para:
recibir una entrada…
SISTEMA DE POSICIONAMIENTO.
(04/01/2018) Sistema de posicionamiento.
Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente distribuidos y una serie de unidades de rastreo , asociadas a cada jugador o usuario, de manera que los módulos espaciales están constituidos a partir de un panel de forma cuadrada, en la que se integran dos agrupaciones de diodos LED de diferente tipo, LEDs de referencia de espectro visible, y LEDs de identificación infrarrojos, incluyendo cada módulo espacial con medios de configuración para sus diodos de identificación así como medios de alimentación o conexión a una fuente de alimentación. Paralelamente, las unidades de rastreo incorporan una serie de cámaras con distintas orientaciones, asociadas a una unidad de procesamiento de imágenes , contando…
Método para apoyar el guiado de un vehículo sobre terreno.
(22/11/2017) Un método para apoyar el guiado de un vehículo sobre terreno, en que el método incluye:
entrenar al menos un primer clasificador usando un primer conjunto de datos de entrenamiento de clasificador de terreno representativos de un campo Actual del vehículo, de modo que el al menos un primer clasificador es entrenado para proporcionar de salida al menos un valor de probabilidad utilizable para clasificar terreno;
obtener un segundo conjunto de datos de entrenamiento de clasificador de terreno que comprenden datos de imagen capturados de un campo Cercano del vehículo y datos indicativos de características de estado del vehículo captadas cuando el vehículo pasa sobre terreno representado en los datos de imagen capturados del campo Cercano;
usar el al menos…
Método y sistema de control de siembra.
(19/07/2017). Solicitante/s: Precision Planting LLC. Inventor/es: KOCH,JUSTIN, BAURER,PHIL, BEYER,KEITH, SCHLIPF,BEN.
Un método para generar un mapa de colocación de semillas para un campo y controlar una sembradora , comprendiendo dicho método:
a) detectar cada pulso de semilla generado por un sensor de semilla a medida que la semilla pasa a través de una trayectoria de semillas de una unidad de fila de la sembradora a medida que atraviesa un campo durante las operaciones de plantación;
b) determinar una ubicación de colocación de semillas de cada semilla en dicho campo asociando un instante de cada pulso de semilla generado con una ubicación de una unidad de GPS;
c) almacenar en memoria cada una de dichas ubicaciones de colocación de semillas dentro de dicho campo; caracterizado por:
d) almacenar en memoria un retraso en el tiempo medido entre un instante asociado con una señal de control de entrega de semillas y dicho instante asociado con uno de dichos pulsos de semilla generados.
PDF original: ES-2639389_T3.pdf
Realización de una acción de respuesta de localización.
(01/03/2017) Un método que comprende:
recibir, en un primer aparato , información indicativa de una comunicación entrante desde un segundo aparato ;
determinar, mediante el primer aparato, una notificación que significa la comunicación entrante;
provocar, mediante el primer aparato, la representación de la notificación;
determinar, mediante el primer aparato, la localización del primer aparato;
recibir, en el primer aparato, información indicativa de una entrada de selección de punto de interés por parte de un usuario del primer aparato que identifica un punto de interés seleccionado; y
provocar, mediante el primer aparato, la realización de una o más acciones asociadas a la comunicación…
Un sistema de supervisión de integridad y un método para supervisar la integridad de una estructura estacionaria.
(22/02/2017) Sistema de supervisión de integridad para supervisar la integridad de al menos una estructura estacionaria (1, 11, 21, 21a, 21b, 31a, 31b, 41, 49a, 49b, 51, 61, 69), comprendiendo el sistema al menos un sensor de vibración (2, 12, 22, 22a, 22b, 32a, 32b, 32c, 42a, 42b, 42c, 52, 62) adaptado para detectar la vibración en función del tiempo, un ordenador (3, 13, 23 , 23 , 23 , 33), un medio de transmisión adaptado para transmitir al ordenador (3, 13, 23 , 23 , 23 , 33) los datos de vibración del al menos un sensor de vibración (2, 12, 22, 22a, 22b, 32a, 32b, 32c, 42a, 42b, 42c, 52, 62), un medio adaptado para obtener y transmitir la posición en función de los datos de tiempo del objeto móvil (4a, 4b, 24a, 24b, 34, 44, 54, 64a,…
Navegación asistida por punto de referencia de precisión.
(15/02/2017) Un método de navegación de vehículo, que comprende:
procesar imágenes preexistentes para extraer un primer conjunto de características de punto de referencia con un primer algoritmo de extracción;
proporcionar una base de datos de características de punto de referencia que incluye el primer conjunto de características de punto de referencia y que comprende datos posicionales para describir posiciones de características de punto de referencia;
procesar imágenes en vuelo desde un sensor de imagen con un segundo algoritmo de extracción para extraer un segundo conjunto de características de punto de referencia;
…
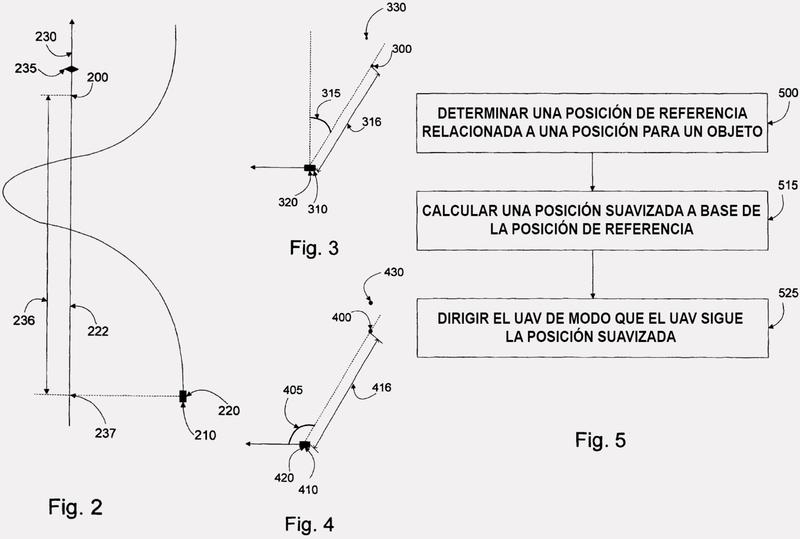
Procedimiento y sistema de dirección de un vehículo aéreo no tripulado.
(26/10/2016). Ver ilustración. Solicitante/s: UMS Skeldar Sweden AB. Inventor/es: MOLANDER,SÖREN, SÖDERMAN,JOHAN, WALDO,MATTIAS.
Un procedimiento de dirección de un UAV, Vehículo Aéreo No Tripulado, para habilitar un comando de alto nivel de dicho UAV, el procedimiento comprende las etapas de:
- determinar una posición de referencia relacionada con una posición para un objeto que dicho UAV debería seguir; estando el procedimiento caracterizado por:
- calcular una posición suavizada en base a en dicha posición de referencia, en el que el cálculo implica regular dicha posición suavizada a dicha posición de referencia, de modo que dicha posición suavizada tiene una frecuencia de movimiento más baja que dicha posición de referencia; y
- dirigir dicho UAV de modo que dicho UAV sigue la posición suavizada.
PDF original: ES-2612163_T3.pdf
Descubrimiento de equipos de construcción en una red.
(10/08/2016) Sistema adaptado para determinar la localización de al menos un equipo (unidad 1 a unidad m) de soldadura en un sitio de construcción, comprendiendo el sistema:
una unidad de ordenador principal central, al menos otro dispositivo;
comprendiendo además el al menos un equipo de soldadura un componente de soldadura; un componente cliente WAP de Protocolo de Aplicación Inalámbrica adaptado para facilitar la transferencia de información asociada con el componente de soldadura entre el componente de soldadura y un componente de posicionamiento para proporcionar una localización física del al menos un equipo (unidad 1 a unidad m) de soldadura; y un componente…
Dispositivo para proporcionar información de rutas, procedimiento para proporcionar información de rutas, programa y medio de grabación de información.
(06/07/2016) Un dispositivo proveedor de información de rutas , que comprende:
medios que almacenan datos de mapas que incluyen una ondulación de una topografía real;
medios de adquisición configurados para adquirir información sobre primeras rutas, conteniendo cada uno una o más rutas desde un punto correspondiente a una dirección de un usuario en los datos de mapas hasta una pluralidad de puntos predeterminados en una región que contiene el punto que corresponde a la dirección del usuario en los datos de mapas;
medios de determinación configurados para determinar una segunda ruta desde un punto de inicio hasta un punto final,…
Sistema de provisión de información de posición, transmisor interior y método para proporcionar información de posición.
(15/06/2016) Un sistema de provisión de información de posición que puede proporcionar información de posición mediante el uso de una primera señal de posicionamiento que es una señal de espectro ensanchado procedente de cada uno de una serie de satélites, que comprende un transmisor interior y un aparato de provisión de información de posición , en el que:
el transmisor interior incluye una primera unidad de almacenamiento que almacena datos de posición para identificar una ubicación de instalación del transmisor interior, una unidad de generación para generar, como una señal de espectro ensanchado, una segunda señal de posicionamiento que es una señal modulada que tiene los datos de posición, y una unidad de transmisión para transmitir la señal de espectro ensanchado generada; y
el aparato de provisión de información de posición incluye una…
(25/05/2016) Método de determinación de rutas para al menos dos vehículos , comprendiendo el método:
medir, mediante un equipo de medida , una posición de un primer vehículo ;
medir, mediante el equipo de medida, una posición de un segundo vehículo ;
proporcionar, para uso por uno o varios procesadores , una especificación de una región , teniendo la región una posición fija con relación al primer vehículo;
usar las medidas y la especificación de la región, realizando, por parte del o de los procesadores, un proceso de determinación de rutas para determinar una primera ruta para el primer vehículo y una segunda ruta para el segundo vehículo ; en que…
Procedimiento para el apoyo de la navegación inercial de un aparato volador.
(30/03/2016) Procedimiento para el apoyo de la navegación inercial de un aparato volador (FK) con un sistema de navegación inercial (INS) que presenta una unidad de medición de la inercia (IMU) y con una cámara que mira hacia delante para la captación continua de una serie de imágenes de un escenario sobrevolado por el aparato volador (FK), proporcionando la serie de imágenes captadas de forma continua datos para una comparación de los datos, que apoya la navegación inercial, con los datos de referencia archivados en el aparato volador (FK), captando la cámara imágenes desde distintas perspectivas del escenario sobrevolado y caracterizándose la posición y la situación de la cámara respecto a un sistema de coordenadas en el momento de una primera toma en la posición 1 por medio de una matriz de rotación y de un vector de traslación, y caracterizándose…
Arquitectura y sistema para la conciencia de la ubicación.
(23/03/2016). Ver ilustración. Solicitante/s: Microsoft Technology Licensing, LLC. Inventor/es: MOORE, TIMOTHY M., TEODORESCU,FLORIN, ALAM,MOHAMMED SHABBIR, BARKLEY,WARREN VINCENT, PEASE,GEOFFREY E, SHAFER,STEVEN A. N, YAO,YINGHUA, PAWAR,MADHURIMA, KRUMM,JOHN C.
Un procedimiento de operación de un servicio implementado por ordenador en un dispositivo informático que comprende:
recibir una solicitud de contexto de ubicación del dispositivo informático;
adquirir, de uno o más dispositivos de detección de la ubicación, datos asociados con la ubicación actual; reconciliar cualquier incoherencia en los datos adquiridos relativa a la ubicación actual aplicando al menos un proceso a los datos adquiridos; y
generar un objeto de ubicación accesible a una o más aplicaciones , incluyendo el objeto de ubicación un contexto de ubicación reconciliado para el dispositivo informático.
PDF original: ES-2569264_T3.pdf
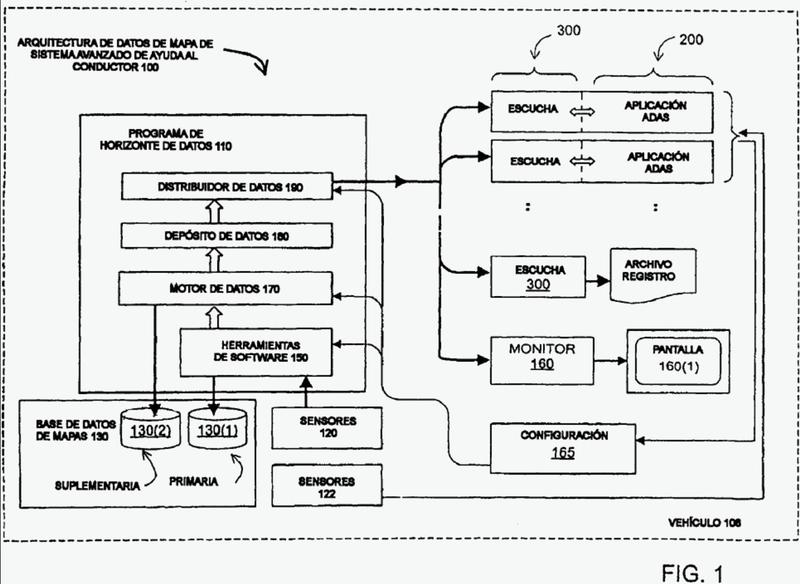
Plataforma de arquitectura de datos de mapas para sistemas avanzados de ayuda al conductor.
(17/02/2016). Ver ilustración. Solicitante/s: HERE Global B.V. Inventor/es: SCHMITT, MATTHIAS, BECHTOLSHEIM,STEPHAN V, DUNN,LARRY, HECHT,ANDREAS, FEIGEN,JERRY, ROSER,MICHELLE.
Un metodo de obtencion de datos de horizonte electronico para su uso por aplicaciones que usan los datos de horizonte electronico para proporcionar ayuda a un conductor de un vehiculo mientras se conduce, caracterizado por que el metodo comprende:
recibir mensajes que incluyen una identificacion de datos de horizonte electronico , en donde los datos de horizonte electronico incluyen datos que representan todos los recorridos a lo largo de segmentos de carretera por los que puede marchar el vehiculo de motor desde la posicion actual del vehiculo hasta una extension asociada con un umbral; y
obtener los datos de horizonte electronico usando la identificacion cuando una aplicacion de ayuda al conductor esta preparada para recibir nuevos datos de horizonte electronico.
PDF original: ES-2569936_T3.pdf
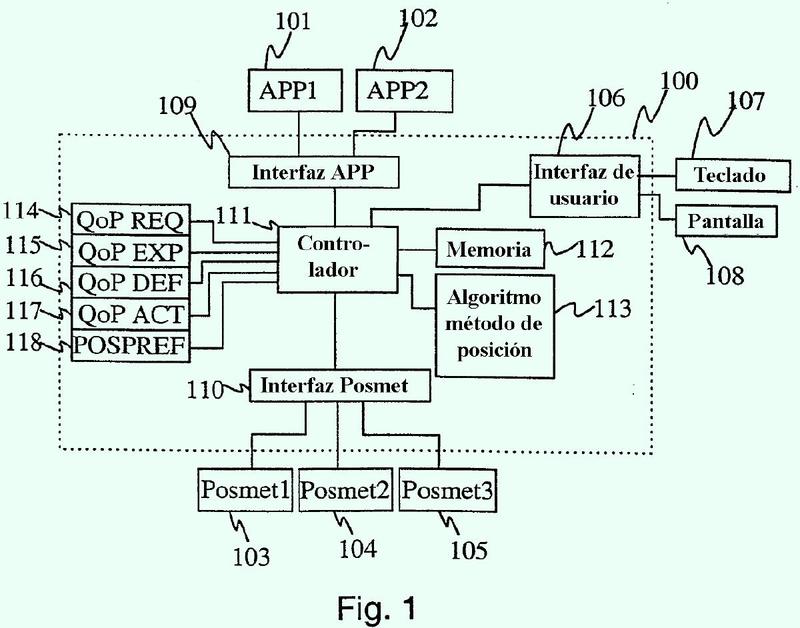
Método y dispositivo para determinación de posición.
(06/01/2016). Ver ilustración. Solicitante/s: Nokia Technologies OY. Inventor/es: VILPPULA, MATTI, NIEMI, MARKKU, MATTILA,ARTO.
Método para determinar la posición de un dispositivo terminal utilizando uno o más métodos de posicionamiento, caracterizado porque en el dispositivo terminal está previsto un dispositivo de selección de método de posicionamiento (PMSD) está previsto en el dispositivo terminal para gestionar centralmente mediante uno o más programas de aplicación la utilización de uno o más métodos de posicionamiento.
PDF original: ES-2192157_T3.pdf
PDF original: ES-2192157_T1.pdf
Unidad de a bordo y servidor de transacciones para un sistema de peaje de carreteras.
(30/12/2015) Unidad de a bordo para un sistema de peaje de carreteras, que comprende un receptor de satélite para generar una secuencia de fijos de posición (pi) a partir de señales de posición de una red global de satélites, un módulo de telefonía móvil para la comunicación a través de una red de telefonía móvil con un servidor de transacciones alejado y un procesador (3') conectado al receptor de satélite y que controla el módulo de telefonía móvil , caracterizado por que el procesador está configurado para generar en un primer estado de funcionamiento, a partir de la secuencia de fijos de posición (pi), mediante una reducción de datos, una secuencia de mensajes de posición…
Método y dispositivo para la determinación de un ángulo de balanceo.
(23/12/2015) Método para la determinación del ángulo de balanceo de un cuerpo giratorio a modo de proyectil utilizando sensores para la detección de señales de rotación en un sistema (xBF, yBF, zBF) de coordenadas fijado al cuerpo, estando los sensores situados a lo largo de los ejes de referencia del sistema de coordenadas fijado al cuerpo a lo largo del eje (xBF) de balanceo y unos ejes (yBF, zBF) perpendiculares primero y segundo que son perpendiculares al eje de balanceo, emitiendo los sensores situados a lo largo de los ejes (yBF, zBF) de referencia que son perpendiculares al eje de balanceo señales rotativas que son periódicas, filtrándose las señales de rotación fijadas al cuerpo emitidas por los sensores situados a lo largo de los ejes (yBF, zBF) de referencia que son perpendiculares…
{kind=link}
{kind=link}
{kind=link}
{kind=link}