Procedimiento para mejorar la precisión de un sistema de navegación en base a radio.
Un procedimiento para mejorar la precisión de un sistema (100) de navegación en base a radio para corregir una posición dada por dicho sistema (100) de navegación en base a radio con un vector de corrección derivado a partir de datos de localización almacenados en una base (105) de datos del mapa,
en el que el vector de corrección es calculado mediante;
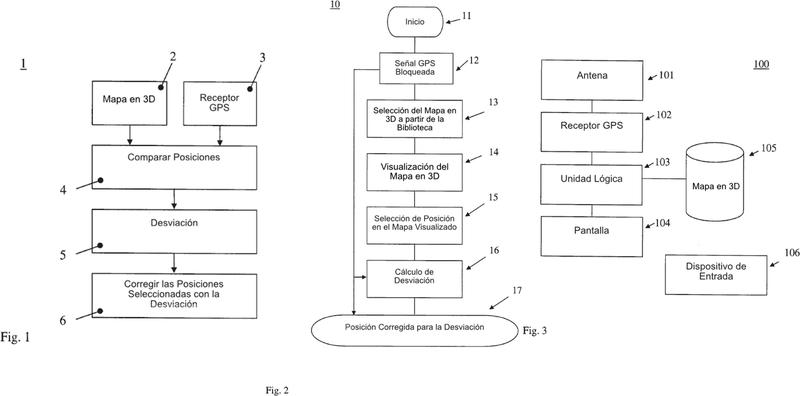
(a) medición de coordenadas de posición del sistema (100) de navegación en base a radio,
(b) seleccionar en base a las coordenadas de posición medidas de las coordenadas de posición del sistema de navegación en base a radio, un conjunto de datos de mapas en 3D para dichas coordenadas de posición medidas a partir de una base (105) de datos del mapa,
(c) determinar a partir de los datos del mapa en 3D seleccionados una posición real, en la que la posición real se determina visualizando los datos del mapa en 3D como un mapa en 3D en una pantalla (104) y
seleccionando la posición real en el mapa en 3D visualizado, en la que la posición real en el mapa visualizado se selecciona marcando la posición en la pantalla (104),
(d) recuperar en base a la posición real determinada las coordenadas de los datos de la posición real a partir de los datos del mapa en 3D, y
(e) calcular el vector de corrección a partir de una diferencia de posición entre las coordenadas medidas de posición del sistema de navegación en base a radio y las coordenadas recuperadas de posición real,
en el que la posición dada por el sistema (100) de navegación en base a radio se corrige con el vector de corrección calculado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2011/000162.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: PERSSON, PER-OLOF, MICHEL,ROLF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C21/30 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Comparación de planos o mapas topográficos.
- G01S19/40 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Corrección de la posición, de la velocidad o de la actitud.
PDF original: ES-2788750_T3.pdf
Reivindicaciones:
1. Un procedimiento para mejorar la precisión de un sistema (100) de navegación en base a radio para corregir una posición dada por dicho sistema (100) de navegación en base a radio con un vector de corrección derivado a partir de datos de localización almacenados en una base (105) de datos del mapa, en el que el vector de corrección es calculado mediante;
(a) medición de coordenadas de posición del sistema (100) de navegación en base a radio,
(b) seleccionar en base a las coordenadas de posición medidas de las coordenadas de posición del sistema de navegación en base a radio, un conjunto de datos de mapas en 3D para dichas coordenadas de posición medidas a partir de una base (105) de datos del mapa,
(c) determinar a partir de los datos del mapa en 3D seleccionados una posición real, en la que la posición real se determina visualizando los datos del mapa en 3D como un mapa en 3D en una pantalla (104) y seleccionando la posición real en el mapa en 3D visualizado, en la que la posición real en el mapa visualizado se selecciona marcando la posición en la pantalla (104) ,
(d) recuperar en base a la posición real determinada las coordenadas de los datos de la posición real a partir de los datos del mapa en 3D, y
(e) calcular el vector de corrección a partir de una diferencia de posición entre las coordenadas medidas de posición del sistema de navegación en base a radio y las coordenadas recuperadas de posición real, en el que la posición dada por el sistema (100) de navegación en base a radio se corrige con el vector de corrección calculado.
2. Un procedimiento para mejorar la precisión de un sistema (100) de navegación en base a radio de acuerdo con la reivindicación 1, caracterizado porque el sistema (100) de navegación en base a radio es un receptor GPS.
3. Un procedimiento de acuerdo con la reivindicación 1, en el que los datos del mapa en 3D contienen información de posición para un área donde las coordenadas de posición para el mapa en 3D son una combinación de información de localización de posición y altitud junto con un componente visual que es parte de una foto del entorno visualizado o un área coloreada.
Patentes similares o relacionadas:
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
Sistema y método para medir un desplazamiento de una plataforma móvil, del 18 de Marzo de 2020, de SZ DJI Technology Co., Ltd: Un metodo para detectar un desplazamiento de una plataforma movil, que comprende: obtener un primer marco (811a) y un segundo marco (811b) con un dispositivo […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Navegación vehicular basada en datos de calidad de sensor específicos del sitio, del 23 de Octubre de 2019, de DEERE & COMPANY: Un método para determinar la localización de un vehículo, el método que comprende: determinar los datos de localización de recepción dentro de una celda de un área […]
Navegación basada en al menos un sensor y un mapa 3D, del 16 de Octubre de 2019, de Vricon Systems Aktiebolag: Un procedimiento de navegación de un vehículo aéreo, comprendiendo el procedimiento la provisión de una imagen de sensor a partir de un […]
Procedimiento de provisión de información de ruta y dispositivo electrónico para procesar el mismo, del 17 de Julio de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de operación de un dispositivo electrónico, que comprende: determinar por al menos un sensor una ubicación presente como una […]
Múltiples grupos de control de enlace de radio (RLC), del 15 de Mayo de 2019, de Intel IP Corporation: Un equipo de usuario, UE, capaz de agregación de portadoras, CA, configurado para procesar el flujo de control de enlace de radio, RLC, dicho UE […]
 MÉTODO Y SISTEMA PARA EL MAPEO DE DATOS DE SENSORES DE ALCANCE SOBRE DATOS DE SENSORES DE IMAGEN, del 27 de Mayo de 2011, de TELE ATLAS B.V: Sistema informático que comprende un procesador y memoria conectada al procesador, donde la memoria comprende un programa […]
MÉTODO Y SISTEMA PARA EL MAPEO DE DATOS DE SENSORES DE ALCANCE SOBRE DATOS DE SENSORES DE IMAGEN, del 27 de Mayo de 2011, de TELE ATLAS B.V: Sistema informático que comprende un procesador y memoria conectada al procesador, donde la memoria comprende un programa […]