Método y dispositivo para la determinación de un ángulo de balanceo.
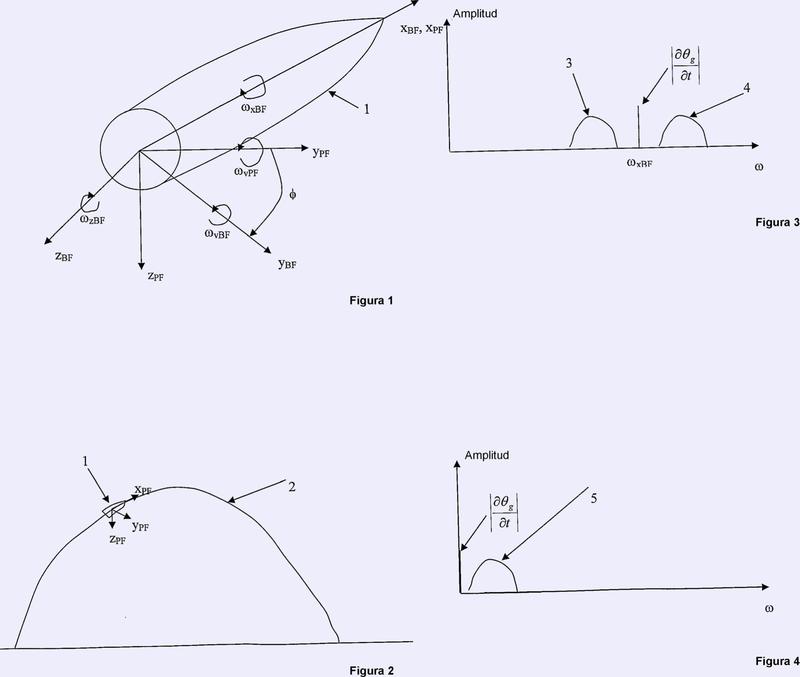
Método para la determinación del ángulo de balanceo de un cuerpo (1) giratorio a modo de proyectil utilizando sensores para la detección de señales de rotación en un sistema (xBF,
yBF, zBF) de coordenadas fijado al cuerpo, estando los sensores situados a lo largo de los ejes de referencia del sistema de coordenadas fijado al cuerpo a lo largo del eje (xBF) de balanceo y unos ejes (yBF, zBF) perpendiculares primero y segundo que son perpendiculares al eje de balanceo, emitiendo los sensores situados a lo largo de los ejes (yBF, zBF) de referencia que son perpendiculares al eje de balanceo señales rotativas que son periódicas, filtrándose (7) las señales de rotación fijadas al cuerpo emitidas por los sensores situados a lo largo de los ejes (yBF, zBF) de referencia que son perpendiculares al eje de balanceo,
estando el método caracterizado porque las señales de rotación fijadas al cuerpo emitidas por los sensores situados a lo largo de los ejes (yBF, zBF) de referencia que son perpendiculares al eje de balanceo se mezclan con un ángulo (Φ) de balanceo estimado determinado a partir de la señal de rotación procedente del sensor situado a lo largo del eje de balanceo y se compensan por un término (Δ Φ) correctivo, y a continuación se aplica un filtro paso bajo, calculando los siguientes parámetros:**Fórmula**
donde:
ωyBF y ωzBF son las señales de rotación emitidas desde los sensores situados a lo largo de los ejes de referencia que son perpendiculares al eje de balanceo,
Φ es el ángulo de balanceo determinado a partir de la señal de rotación procedente del sensor situado a lo largo del eje (xBF) de balanceo, y ΔΦ es el término correctivo, y
LP indica que a los parámetros calculados se les aplica filtro paso bajo, estando el método además caracterizado porque el término (ΔΦ) correctivo se determina según el siguiente cálculo:**Fórmula**
donde K es un factor de amplificación
y porque el ángulo de balanceo se determina a partir de la señal de rotación procedente del sensor situado a lo largo del eje (xBF) de balanceo y se compensa por el término (Δ Φ) correctivo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2005/001600.
Solicitante: BAE SYSTEMS BOFORS AB.
Nacionalidad solicitante: Suecia.
Dirección: 691 80 Karlskoga SUECIA.
Inventor/es: LÖNN,OLOF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41G7/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
- G01C1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Medida de ángulos.
- G01C21/00 G01C […] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C3/08 G01C […] › G01C 3/00 Medida de distancias en línea de vista; Telémetros ópticos (cintas, cadenas o ruedas para la medida de la longitud G01B 3/00; sistemas de triangulación activos, p. ej. que utilizan la transmisión y reflexión de ondas electromagnéticas que no sean ondas de radio, G01S 17/48). › Utilización de detectores de radiación eléctricos.
PDF original: ES-2564582_T3.pdf
Patentes similares o relacionadas:
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Sistema de referencia de posición y método para posicionar y seguir uno o más objetos, del 1 de Mayo de 2019, de KONGSBERG SEATEX AS: Método para posicionar y seguir uno o más objetos por medio de una unidad de transceptor fijada a una plataforma del sensor, tal como un objeto o embarcación, y uno […]
MEDIDOR ELECTROÓPTICO INTEGRAL PARA LA MEDICIÓN DE DISTANCIAS DE USO AUTOMOTRIZ, del 20 de Septiembre de 2018, de REMBERG BUENO, Ernst Albert: El dispositivo objeto de la presente invención es un medidor de distancias electroóptico que funciona haciendo rebotar en un blanco u objetivo […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]
Dispositivo para la medición óptica de la distancia, del 2 de Noviembre de 2016, de ROBERT BOSCH GMBH: Dispositivo de medición para la medición óptica de la distancia, particularmente, dispositivo de medición manual, que comprende: un dispositivo de emisión […]
Jalón de prismas reflectores inclinado y procedimiento de uso, del 10 de Junio de 2016, de UNIVERSIDAD DE SEVILLA: Jalón de prismas reflectores inclinado y procedimiento de uso, de aplicación en topografía que permite la medición de puntos no visibles, ni su vertical, […]
Sistema para medir la posición o posiciones temporales de tránsito de pulsos en datos en el dominio del tiempo, del 27 de Abril de 2016, de PICOMETRIX, LLC: Un sistema para interpretar una forma de onda de terahercios (THz), comprendiendo el sistema un transmisor de THz configurado para emitir […]
 EQUIPO MEDIDOR DE DISTANCIA, del 1 de Febrero de 2011, de ROBERT BOSCH GMBH: Equipo medidor de distancia para la medición de distancias sin contacto, particularmente un equipo de mano, con una carcasa que presenta una superficie […]
EQUIPO MEDIDOR DE DISTANCIA, del 1 de Febrero de 2011, de ROBERT BOSCH GMBH: Equipo medidor de distancia para la medición de distancias sin contacto, particularmente un equipo de mano, con una carcasa que presenta una superficie […]