Dispositivo de extracción y acabado de piezas de trabajo.
(15/10/2018) Un dispositivo de extracción y acabado de piezas de trabajo adecuado para procesar una pieza de trabajo de resina extraída de una máquina de moldeado , que comprende un robot de extracción de piezas de trabajo que extrae directa o indirectamente la pieza de trabajo de la máquina de moldeado , y un robot de procesamiento que procesa la pieza de trabajo , caracterizado porque el robot de procesamiento procesa la pieza de trabajo mientras que el robot de extracción de piezas de trabajo cambia una posición de procesamiento de la pieza de trabajo , el robot de procesamiento comprende una herramienta de procesamiento que comprende, en un lado de la cara de extremo frontal (29F) de una porción del cuerpo principal (29C) de la cuchilla del cortador del mismo, una porción de la cuchilla de corte (29A)…
Procedimiento para eliminar adhesivo excedente.
(09/10/2018). Solicitante/s: EFTEC EUROPE HOLDING AG. Inventor/es: MULLER, MARTIN, STRAUSS,KURT, SCHWEINFURTH,MICHAEL, WANNER,REINER.
Procedimiento para eliminar el adhesivo excedente al unir dos piezas , en el que se aplica un adhesivo sobre una zona de unión de al menos una de las piezas (10, 12 y las piezas se unen por la zona de unión , donde el adhesivo excedente tras la unión se retira por medio de un dispositivo de aspiración ,
caracterizado porque
durante la aspiración, el dispositivo de aspiración se apoya con un elemento de guía al menos por zonas en una de las piezas.
PDF original: ES-2685484_T3.pdf
Sistema y método de procesamiento para una superficie de una pieza de trabajo.
(14/02/2018) Un sistema de procesamiento de una superficie de un grifo para agua, con un centro de procesamiento, el sistema de procesamiento está dispuesto en un lado del centro de procesamiento el cual mecaniza los grifos para agua, en donde el sistema de procesamiento comprende un grupo de unidades de pulido (A) y un primer manipulador, caracterizado por dos máquinas de talla de fresa para exfoliar simétricamente la superficie situadas a ambos lados del centro de procesamiento y una plataforma de posicionamiento del artículo situada entre dichas dos máquinas de talla de fresa para colocar el grifo para agua, un primer manipulador está dispuesto entre el centro de procesamiento y la plataforma de posicionamiento del artículo…
Robot para la inspección de palas de rotor de turbinas eólicas.
(13/12/2017). Solicitante/s: KRAMPE, Nina Katharina. Inventor/es: KRAMPE,SUSANNE.
Robot para la inspección de palas de rotor de turbinas eólicas con una estructura de bastidor con una abertura interior que rodea una pala de rotor en uso y una pluralidad de hélices colocadas en la estructura de bastidor para un movimiento de vuelo vertical del robot y un sistema de detección del estado de la pala de rotor unido a la estructura de bastidor para una inspección de las palas de rotor preferentemente sin contacto, en el que está previsto un cable , por ejemplo, un cable de alimentación y/o de datos, para conectar el robot a una estación ubicada, por ejemplo, en el suelo o en un vehículo, por ejemplo, una estación de control y análisis.
PDF original: ES-2661595_T3.pdf
Dispositivo de prensión de al menos un producto deformable.
(16/08/2017) Dispositivo de prensión de al menos un producto alimenticio deformable , de manera ventajosa un alimento relleno que comprende una envoltura exterior que rodea un relleno interior , comprendiendo el dispositivo de prensión :
- una cámara ,
- un sistema de despresurización de la cámara , y
- una conexión fluídica que conecta el sistema de despresurización a la cámara ,
caracterizado porque el dispositivo de prensión comprende además:
- al menos una placa perforada que define una superficie de recepción del producto alimenticio deformable , presentando la placa perforada al menos una perforación que desemboca en la superficie de recepción y en la cámara…
Instalación de revestimiento y procedimiento de funcionamiento correspondiente.
(17/05/2017) Instalación de revestimiento para el revestimiento de componentes, en particular para pintar componentes de aeroplano, con
a) una primera cabina de revestimiento , en particular para revestir unos componentes de aeroplano de grandes dimensiones,
b) un robot de revestimiento de varios ejes, que posiciona un aparato de revestimiento, en particular, un pulverizador rotativo,
c) una segunda cabina de revestimiento , en particular para revestir unos componentes de aeroplano de pequeñas dimensiones ,
d) un eje de desplazamiento para desplazar el robot de revestimiento a lo largo del eje de desplazamiento , discurriendo el eje de desplazamiento dentro de la primera cabina de revestimiento y extendiéndose en la segunda cabina de revestimiento , de manera que el robot de revestimiento …
Cabezal con alambre de corte, combinado con un brazo robótico, para trabajar materiales de piedra.
(29/03/2017) Un cabezal con un alambre de corte o conformación apto para realizar trabajos complejos sobre bloques de mármol, granito, travertino, cemento u hormigón y materiales pétreos en general, destinados a obtener artículos moldeados, artísticos y arquitectónicos, que comprende un brazo de un manipulador o robot antropomorfo con varios grados de libertad y con un par de elementos en forma de placa (13, 13') que definen un armazón con ramificaciones opuestas conectadas a una ramificación de conexión central , dotada de una pluralidad de poleas (28, 28') a lo largo de las cuales se extiende dicho alambre de corte , caracterizado…
Célula robotizada, instalación y método para eliminar rebabas de piezas.
(08/02/2017) Una célula robotizada para eliminar rebabas o excesos de material en piezas de gran tamaño con al menos una superficie curva, que comprende una base y un robot de al menos 6 ejes de libertad,
en la que el robot comprende medios de conexión para, en funcionamiento, llevar instalados un útil de esmerilado y un sistema de escaneo ,
y en la que dicho útil de esmerilado comprende a su vez un sistema de control configurado para controlar la fuerza de contacto ejercida sobre la pieza a rebabar y un electromandrino configurado para incorporar y, en uso, hacer girar un elemento abrasivo ,
de forma que el robot está configurado para, en funcionamiento y con respecto a una trayectoria teórica previamente programada, poder adaptar su…
Herramienta rotativa de retirada de materia de una pieza de materia plástica.
(02/11/2016). Solicitante/s: COMPAGNIE PLASTIC OMNIUM. Inventor/es: TRESSE,DAVID.
Sistema de retirada de materia de una pieza de materia plástica, que comprende:
- un eje rotativo provisto de un medio abrasivo , incluyendo el eje rotativo una parte no abrasiva , que puede formar tope radial del sistema sobre un borde de guiado;
- un medio motor de puesta en rotación del medio abrasivo unido al eje rotativo ; y
- un medio de unión mecánica a un robot, caracterizado por que la unión mecánica es de tipo rótula de dedo.
PDF original: ES-2668530_T3.pdf
Sistema de pulimiento automatizado.
(05/10/2016) Un método que comprende:
realizar un primer tipo de operación en una serie de características de superficie sobre una superficie de un objeto que utiliza un primer efector de extremo;
generar datos de láser de retroalimentación alrededor de una serie de características de superficie después de que se ha realizado el primer tipo operación utilizando un dispositivo láser; y
realizar un segundo tipo de operación sobre una serie de características de superficie utilizando un segundo efector de extremo y los datos de láser de retroalimentación para reelaborar la serie de características …
Aparato para posicionamiento automatizado de sonda de ensayo de corrientes parásitas.
(10/08/2016) Un aparato para inspección y ensayos automatizados de una placa tubular en el que la placa tubular tiene una pluralidad de aberturas de tubo dispuestas sobre un plano de la placa tubular, comprendiendo el aparato:
un conjunto de núcleo que comprende:
una parte del cuerpo deslizante que contiene una cápsula de agarrador giratoria con tres agarradores de tubo;
un acoplamiento de cabezal de herramientas montado articuladamente a dicho conjunto de núcleo; y
accionadores de carcasa exterior; y caracterizado por:
una parte de carcasa con carcasas exteriores izquierda y derecha;
comprendiendo cada carcasa…
Cabezal de herramienta para realizar operaciones industriales que tiene un sistema de monitoreo inalámbrico.
(10/08/2016) Un sistema de realización de operaciones industriales, que comprende:
- al menos un cabezal (H) de herramienta provisto de una herramienta ;
- al menos un sensor (S) asociado a dicho cabezal (H) de herramienta y configurado para detectar un parámetro operativo del cabezal (H) de herramienta;
- una unidad (M) de control para controlar la operación de dicho cabezal (H) de herramienta,
- un módulo (E) de control montado sobre dicho cabezal (H) de herramienta y que incluye:
- una unidad (A) de adquisición de datos conectada a dicho al menos un sensor (S) y configurada para adquirir datos procedentes de al menos un sensor (S); y
- una unidad (T) de transmisión inalámbrica conectada…
(25/05/2016) Una herramienta de mecanizado robótica que comprende un mecanismo de transmisión de potencia , que tiene un rodillo de transmisión de potencia y un árbol de transmisión de potencia , una cinta de mecanizado circular , un mecanismo de tensado y un mecanismo de contacto para el contacto de la herramienta con un objeto que se ha de mecanizar, y que tiene un rodillo de contacto y un árbol de rodillo de contacto;
de tal manera que la cinta de mecanizado circular se dispone en bucle entre el rodillo de contacto y el rodillo de transmisión de potencia con el fin de hacer que la cinta de mecanizado circular se mueva entre el rodillo de contacto y el rodillo de transmisión de potencia en respuesta a la rotación del mecanismo…
(18/05/2016) Un aparato de mecanización para mecanizar una pieza de trabajo (W) que incluye una superficie (Wf) a mecanizar en un borde lateral de una parte (Wd) a perfilar, que sirve como superficie de referencia, en otro borde lateral, comprendiendo el aparato de mecanización un miembro de perfilado y una unidad de mecanización que incluye una herramienta de mecanización y una montura de prensión de la pieza de trabajo, incluyendo la montura de prensión de la pieza de trabajo un par de rodillos , en el que la pieza de trabajo (W) puede quedar sujeta entre el miembro de perfilado cuando el miembro de perfilado se apoya contra la parte (Wd) a perfilar y la herramienta de mecanización está dispuesta de tal manera que una distancia entre la herramienta de mecanización y el miembro de perfilado puedan…
Cuchilla de fresa y sistema de desbarbado.
(11/05/2016) Una cuchilla de fresa para un aparato de desbarbado para cortar las rebabas de una pieza que tiene
una parte (10A, 30A, 40A, 50A, 60A, 70A) de filo de corte que corresponde a la raíz de las rebabas;
y una parte (10B, 30B, 40B, 508, 60B, 70B) de copia que corresponde a una parte de cara de la pieza y no constituye un filo de corte,
en el que la posición de la punta del filo (10A1, 30A1) de corte de la parte de filo de corte se localiza en la misma posición que una cara de copia que constituye la parte de copia o se localiza para estar más lejos de la pieza que la cara de copia; y
en el que una parte (10A2, 30A2, 70B1, 70B2, 70B3) de suavizado para suavizar una parte desbarbada por la parte de…
Estación robótica interactiva para la preparación y dispensación de bebidas, en especial cócteles.
(17/02/2016) Una estación de preparación de bebidas interactiva que comprende una interfaz de entrada de usuario para pedir una bebida, una estación robótica para recoger ingredientes en función del pedido, mezclar los ingredientes y verter la bebida en un recipiente abierto en la parte superior, una zona (4, 4') de recogida donde el usuario recibe el recipiente abierto en la parte superior de la estación robótica y una unidad de control para controlar automáticamente la estación robótica en función de las entradas desde la interfaz de entrada para preparar la bebida correspondiente al pedido de bebida, en donde la estación robótica comprende, al menos, un brazo robótico que tiene un receptor final para…
Dispositivo de pulverización y adaptador de cambio rápido.
(27/01/2016) Dispositivo de pulverización con una superficie de apoyo para el montaje en un adaptador de cambio rápido , que presenta una primera y una segunda superficie de montaje ,
- con una carcasa y un cabezal de pulverización , estando la superficie de apoyo provista en la carcasa ,
- con por lo menos un elemento de sujeción sobresaliente con respecto a la superficie de apoyo con un eje longitudinal LB,
en el que el dispositivo de pulverización presenta segundos medios, que están previstos para la sujeción desconectable en la segunda superficie de montaje del adaptador de cambio rápido , y en donde estos segundos medios agarran elemento…
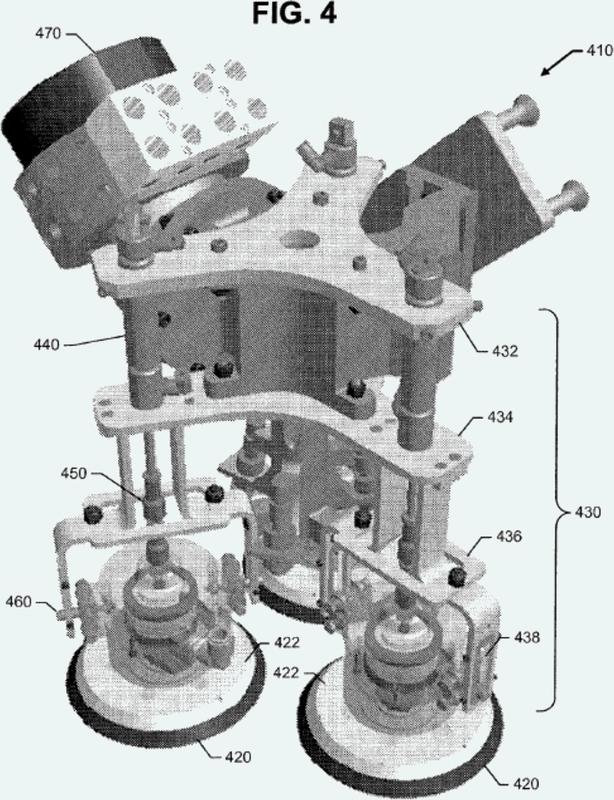
Sistema que comprende un efector terminal robótico que incluye múltiples herramientas de abrasión y un método que utiliza el efector terminal robótico.
(28/12/2015). Ver ilustración. Solicitante/s: THE BOEING COMPANY. Inventor/es: PANERGO,REYNOLD R, VANAVERY,JAMES C.
Un método que comprende utilizar un efector terminal robótico para realizar la preparación de la superficie en una superficie de un componente de la aeronave, incluyendo el efector terminal una primera, segunda y tercera herramienta de abrasión que tienen sus almohadillas de respaldo en una disposición triangular, caracterizándose el método por extender, retraer y operar selectivamente las herramientas de abrasión para aplicar el efector terminal a diferentes tamaños de área de superficie.
PDF original: ES-2554937_T3.pdf
MAQUINA ROBOTICA PARA EL RETIRO E INSERCION DE PARRILLAS TROMMEL Y SU METODO DE OPERACION.
(19/11/2015). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: CARMONA ACOSTA,Carlos.
Máquina robótica para el retiro e inserción de parrillas o palmetas del Trommel, que comprende una herramienta para la toma de la palmeta, un brazo robótico de 6 grados de libertad que manipula la herramienta y que permite retirar y reponer la palmeta y una viga principal móvil que se ancla a la estructura del edificio o lugar de instalación o de montaje y que permite desplazar el manipulador o brazo robótico e introducirlo al interior del Trommel para desarrollar la operación. Además, se describe el método de operación de dicha máquina robótica.
Robot submarino humanoide transformable.
(26/08/2015) Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación se sucede desde una configuración humanoide en la cual el robot inclina el tronco hacia adelante y flexiona las patas , manteniendo erguida la cabeza , de manera que la maniobra culmina en un postura en la que el robot se agacha, mientras que las siguiente fases implican la flexión completa del torso coordinada esta acción con la flexión de los brazos , mientras la cabeza continúa erguida. El proceso opuesto de transformación es igualmente posible en el orden inverso.
Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
(19/06/2015) Sistema paralelo de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
El sistema está formado por dos mecanismos paralelos tipo SCARA, cada uno de los cuales está formado por dos brazos articulados entre sí por juntas rotacionales , y los brazos articulados entre sí en correspondencia con efectores finales , siendo dicha articulación rotacional-esférica formada por un cojinete o rodamiento y una rótula esférica , de manera que en correspondencia con esas articulaciones va montado un cilindro telescópico que es hueco y en el que se introduce el dispositivo que puede estar formado por un catéter, aguja quirúrgica u otro dispositivo similar, siendo accionados los brazos por motores para que el dispositivo montado en el cilindro…
(25/03/2015) Aparato de inspección para detectar defectos en un objeto de análisis en un espacio llenado de líquido , en el que el aparato de inspección comprende un cuerpo de inspección provisto de una parte de soporte destinada a estar dispuesta sobre una superficie de soporte en el espacio llenado de líquido , un dispositivo de detección adaptado para detectar defectos en el objeto de análisis y un equipo de posicionamiento vertical adaptado para ajustar la posición del dispositivo de detección en una dirección vertical cuando la parte de soporte se dispone sobre la superficie de soporte , en el que el equipo de posicionamiento vertical comprende un elemento alargado que presenta una parte vertical (19b), un elemento de fijación adaptado para fijar el dispositivo de detección a la…
Dispositivo y procedimiento para reemplazar una muela de rectificar.
(04/03/2015) Instalación de rectificado con una rectificadora que presenta una placa de cabeza accionada de manera rotatoria y/o oscilante que está configurada para alojar y sujetar de manera separada una muela de rectificar , y con un dispositivo para reemplazar la muela de rectificar , presentando el dispositivo un elemento de tope en el que puede colocarse la placa de cabeza con la muela de rectificar en una posición de retirada, caracterizado porque
- en un borde exterior de la placa de cabeza está previsto al menos un rebaje que para engranar por detrás la muela de rectificar forma una cavidad de engrane entre la muela de rectificar y la placa de cabeza ,
- el dispositivo presenta…
(29/12/2014) Robot submarino modular.
La presente invención trata de un robot submarino modular con una pluralidad de brazos que es transformable en ROV para trabajos en fondos marinos y en construcciones marinas, es un robot con brazos de morfología humanoide que se corresponde con las proporciones cinemáticas de un humano para realizar trabajos y/o para desplazarse y trepar haciendo uso de sus extremidades.
El objeto de la invención es proporcionar un único dispositivo o robot modular escalable en la cantidad de brazos robóticos que puede combinar funcionalidades de navegación, manipulación y desplazamiento en cualquier dirección gracias a la configuración de sus brazos robóticos e impulsores marinos.
CABEZAL Y PROCEDIMIENTO DE MECANIZADO AUTOMÁTICO CON VISIÓN.
(20/11/2014). Ver ilustración. Solicitante/s: LOXIN 2002, S.L.. Inventor/es: ANDUCAS AREGALL,Jordi, GANCHEGUI ITURRIA,Carlos, GALARZA CAMBRA,José Javier.
Cabezal y procedimiento de mecanizado automático con visión que comprende un pie de presión dotado de ventanas laterales can capacidad de apertura y cierre, envolviendo la herramienta de mecanizado, asociado con un dispositivo de desplazamiento vertical dotado de bloqueo mecánico, un equipo de visión conectado con un equipo informático y un módulo de comunicaciones. La invención que se presenta aporta la principal ventaja de dotar a un robot antropomórfico, pensado originalmente para la industria del automóvil y dotado de una precisión relativamente baja, de una precisión de mecanizado notablemente superior, equivalente a equipos de mucha mayor precisión o a robots de tipo de cinemática paralela, compensando asimismo, en tiempo real y de forma continua, el descentrado y la pérdida de la perpendicularidad por la presión del pie de presión, que son comunes en los cabezales convencionales y fuente de errores y falta de precisión.
Cabezal y procedimiento de mecanizado automático con visión.
(19/11/2014) Cabezal y procedimiento de mecanizado automático con visión que comprende un pie de presión dotado de ventanas laterales con capacidad de apertura y cierre, envolviendo la herramienta de mecanizado, asociado con un dispositivo de desplazamiento vertical dotado de bloqueo mecánico, un equipo de visión conectado con un equipo informático y un módulo de comunicaciones.
La invención que se presenta aporta la principal ventaja de dotar a un robot antropomórfico, pensado originalmente para la industria del automóvil y dotado de una precisión relativamente baja, de una precisión de mecanizado notablemente superior, equivalente a equipos de mucha mayor…
Equipo volteador de tolvas.
(24/07/2014) Equipo volteador de tolvas.
La invención propuesta consiste en un sistema desarmable y transportable en camión para voltear tolvas de gran tonelaje, que puede ser utilizado en el mismo lugar donde se desarrollan las faenas mineras, evitando el traslado de las tolvas a otros lugares donde se efectúan la mantención o reparaciones requeridas. El sistema permite levantar desde el piso la tolva y girarla hasta en 360º, lo cual produce un ahorro sustancial de costos, ya que no es necesario contratar grúas que lleguen al lugar para voltear una tolva. Por otra parte, también se produce un ahorro en tiempo de operación ya que muchas veces es necesario…
(14/03/2012) Un robot de amarre para sujetar de manera liberable un buque amarrado a un muelle o a un segundo buque, incluyendo el robot de amarre:
un elemento (1, 1') de acoplamiento atractivo acoplable, de manera liberable, con una superficie para sujetar el buque amarrado ;
una guía alargada sustancialmente vertical a la cual está fijo de manera deslizante el elemento (1, 1') de acoplamiento, para subir y bajar el elemento (1, 1') de acoplamiento;
un carril sustancialmente horizontal al cual está sujeto, de manera deslizante, el elemento atractivo, estando alineado el carril horizontal en paralelo al…
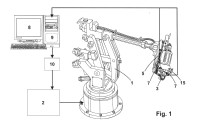
ROBOT PARALELO DE CUATRO GRADOS DE LIBERTAD CON ROTACION ILIMITADA.
(16/11/2007) Robot paralelo de cuatro grados de libertad.#El robot de la invención, tal y como se observa en la figura 1, está compuesto por dos niveles (I), (II), cada uno de los cuales comprende:#- Dos actuadores , unidos a un soporte o columna fija .#- Dos brazos , , dispuestos en posición horizontal, unidos por uno de sus extremos, a los actuadores , respectivamente.#- Dos brazos , unidos articuladamente, a través de uno de sus extremos, al extremo libre de los brazos , respectivamente, y por su otro extremo, unidos entre sí en un punto , definiendo un paralelogramo articulado.#Cada uno de los puntos se desplaza en un plano horizontal, con dos grados de libertad.#El punto del nivel…
DISPOSITIVO PARA EL DESPLAZAMIENTO RELATIVO DE DOS ELEMENTOS.
(01/11/2006) Un dispositivo para el desplazamiento relativo de dos elementos que comprende un arreglo de enlace (5q; 5r) y un arreglo de desplazamiento (6q; 6r) conectado con el arreglo de enlace (5q; 5r), estando proporcionado el arreglo de desplazamiento (6q; 6r) entre el arreglo de enlace (5q; 5r) y el primero (1q; 1r) de los elementos mientras el arreglo de enlace (5q; 5r) está proporcionado entre el arreglo de desplazamiento y el segundo (2q; 2r) de los elementos, estando formado el segundo elemento por el elemento portador ó funcional (3q; 3r), el arreglo de enlace (5q; 5r) que comprende por lo menos tres enlaces (9q, 14q; 94, 14r) está contactado de manera giratoria a través de las juntas en relación con el arreglo de desplazamiento (6q; 6r) y el segundo elemento (2q; 2r), estando conectados los citados enlaces (9q,…
ROBOT ESCANCIADOR DE SIDRA O BEBIDAS SIMILARES.
(01/01/2006) 1. Robot escanciador de sidra o bebidas similares, que adoptando una apariencia de maniquí ataviado con el traje y el pañuelo tradicionales está destinado, en bodegas y establecimientos de restauración, a realizar dicho escanciado de la sidra o bebidas similares ofreciendo posteriormente el vaso al consumidor caracterizado por el hecho de comprender un robot , que incorpora una botella que sostiene en la mano de un brazo levantado sobre su cabeza de la que brotará la bebida, y cuyos dedos de la mano del otro brazo adoptan una posición de forma que sostengan un vaso que recoge dicha bebida, en cuyo interior alberga una estructura tubular que actúa de…
MANIPULADOR AUTOMATICO DE PERFILES EXTRUIDOS.
(01/02/2005) 1.-" Manipulador automático de perfiles extruidos" de tipo que comporta un mecanismo capaz de recoger los perfiles precortados a la salida de la extrusora, e introducirlos en las matrices de corte y estampación correspondientes, caracterizado esencialmente por un chasis con una cinta transportadora central, a cuyos costados se disponen sendas plataformas laterales que alojan unos bancales intercambiables sobre los que se montan el conjunto de matrices adecuado a las piezas a realizar, así como un distribuidor de perfiles constituido por un chasis colgado de una guía transversal en la parte superior central de la máquina. 2. "Manipulador automático de perfiles extruidos" según reivindicación…
{kind=link}
{kind=link}