CIP-2021 : B25J 11/00 : Manipuladores no previstos en otro lugar.
CIP-2021 › B › B25 › B25J › B25J 11/00[m] › Manipuladores no previstos en otro lugar.
Notas[t] desde B21 hasta B32: CONFORMACION
CIP2021: Invenciones publicadas en esta sección.
UN DISPOSITIVO PARA MOVIMIENTO RELATIVO DE DOS ELEMENTOS.
(01/04/2003). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: BROGAARDH, TORGNY.
UN DISPOSITIVO PARA MOVIMIENTO RELATIVO DE DOS ELEMENTOS COMPRENDE DOS DISPOSICIONES DE ENLACES ACOPLADAS EN SERIE MEDIANTE UNA DISPOSICION DE CONEXION . UNA PRIMERA DISPOSICION DE ENLACES COMPRENDE AL MENOS TRES ENLACES QUE SON SUSTANCIALMENTE IGUALES EN LONGITUD Y PARALELOS, ESTANDO DICHOS ENLACES POSICIONADOS EN UNA RELACION SUSTANCIALMENTE TRIANGULAR VISTA A LO LARGO DE LA DIRECCION LONGITUDINAL DE LOS ENLACES, ENTRE LA DISPOSICION DE CONEXION Y EL ELEMENTO . LA SEGUNDA DISPOSICION COMPRENDE AL MENOS UN PARALELOGRAMO QUE ACTUA ENTRE LA DISPOSICION DE CONEXION Y EL ELEMENTO . LA PRIMERA Y LA SEGUNDA DISPOSICION DE APLICACION DE FUERZA ESTAN CONCEBIDAS PARA HACER QUE LA PRIMERA DISPOSICION DE ENLACES 85) PIVOTE. UNA TERCERA DISPOSICION DE APLICACION DE FUERZA ESTA CONCEBIDA PARA HACER QUE LA SEGUNDA DISPOSICION DE ENLACES PIVOTE.
DISPOSITIVO PARA TRANSPORTE DE OBJETOS.
(01/04/1996). Solicitante/s: AB VOLVO. Inventor/es: LILJENGREN, JOHN-ERIK, ZITEK, JOSEF.
DISPOSITIVO PARA DESPLAZAR OBJETOS AL LADO DE UN TRAYECTO PREDETERMINADO FORMADO POR UN SOPORTE UN DESLIZADOR CONTENIDO EN EL SOPORTE Y UN DISPOSITIVO DE AGARRE O SUJECION CONECTADO AL DESLIZADOR QUE SIRVE PARA SUJETAR EL OBJETO TRANSPORTADO POR EL DISPOSITIVO. EXISTE UNA PORTADORA ALARGADA DE MONTAJE DESPLAZABLE EN EL SOPORTE PARA REALIZAR EL MOVIMIENTO INVERSO A LO LARGO DE UN PRIMER TRAYECTO RECTO. EL DESLIZADOR PUEDE MONTARSE LIBREMENTE EN LA PORTADORA ALARGADA PARA REALIZAR EL MOVIMIENTO INVERSO A LO LARGO DE UN SEGUNDO TRAYECTO RECTO, PRACTICAMENTE PERPENDICULAR AL PRIMER TRAYECTO. EL DESLIZADOR TRANSPORTA UN EXTREMO DE UN SISTEMA DE ENLACE CUYO OTRO EXTREMO ESTA LIBRE Y PUEDE DESPLAZARSE EN SENTIDO INVERSO A LO LARGO DE UN TERCER TRYECTO RECTO QUE ES PERPENDICULAR LA PRIMER Y SEGUNDO TRAYECTO. EL EXTREMO LIBRE DEL SISTEMA DE ENLACE TRANSPORTA EL DISPOSITIVO DE SUJECION.
ROBOT INDUSTRIAL DE EJES MULTIPLES.
(16/04/1994) SE PRESENTA UN ROBOR INDUSTRIAL DE EJES MULTIPLES QUE CONSISTE EN UNA ESTRUCTURA DE BANCADA , UNA PALANCA OSCILANTE QUE PUEDE GIRAR Y OSCILAR, UNA PLUMA SALIENTE OSCILANTE Y UNA MANO DE ROBOT DE MIEMBROS MULTIPLES QUE PUEDE GIRAR Y OSCILAR Y CUYOS MIEMBROS ESTAN GUIADOS POR MOTORES DISPUESTOS EN LA PLUMA SALIENTE . LA PLUMA SALIENTE ESTA MONTADA EN UN LADO DE LA PALANCA OSCILANTE CON BRAZO CON AL MENOS DOS MOTORES QUE SE ENCUENTRAN DISPUESTOS EN LOS LADOS DE LA PLUMA SALIENTE EN LA DIRECCION DE EJES OSCILANTES . EN LA EJECUCION CON UN TERCER MOTOR, LOS MOTORES ESTAN DISPUESTOS CON SUS EJES EN UN TRIANGULO DE LADOS CORTOS QUE SON LA BASE DE LOS COJINETES DE LA PLUMA SALIENTE . ALTERNATIVAMENTE, LOS MOTORES SE ENCUENTRAN DISPUESTOS CON SU LADO DE GUIA ENFRENTADOS A LA MANO DEL…
(16/07/1993) CABEZAL DE SOLDADURA, QUE COMPRENDE UN CHASIS QUE ES PORTADOR DE UNA BRIDA DE CONEXION AL PORTAHERRAMIENTAS, DE UNA UNIDAD DE SOLDADURA ELECTRICA, Y DE UNA UNIDAD DE SUMINISTRO DE HILO DE SOLDADURA, CARACTERIZADO PORQUE EL CHASIS CITADO ESTA COMPUESTO POR UNA PLACA A LA QUE SE FIJA, POR UN LADO LA BRIDA DE CONEXION AL PORTAHERRAMIENTAS, Y POR EL OPUESTO UN SOPORTE TRANSVERSAL PARA LA UNIDAD DE SOLDADURA Y UNA COLUMNA PORTADORA DE LA UNIDAD SUMINISTRADORA DEL HILO DE SOLDADURA: CUYO SOPORTE ADOPTA FORMA DE U Y VA FIJADO EN POSICION INVERTIDA POR SU RAMA CENTRAL A LA PLACA, LLEVANDO MONTADO ENTRE SUS RAMAS LATERALES, MEDIANTE UN EJE DE GIRO LIBRE, UN CUERPO DOTADO DE UN PASAJE DE EJE PERPENDICULAR AL DE GIRO DE DICHO CUERPO, EN CUYO PASAJE SE FIJA EL SOLDADOR CON…
(01/04/1993). Solicitante/s: AB VOLVO. Inventor/es: SORENSEN, LEIF.
EL INVENTO SE REFIERE A UN APARATO MANIPULADOR PARA TRANSPORTAR Y MANIPULAR MERCANCIAS . EL APARATO INCLUYE UN EXPOSITOR O ESTRUCTURA SIMILAR; UN RAIL DE TRANSPORTE O TRAYECTO QUE LLEVA EL EXHIBIDOR; UN CARRITO QUE PUEDE DESPLAZARSE A LO LARGO DEL RAIL (10 MEDIANTE UN ELEMENTO MOTOR SEPARADO ; Y UN DISPOSITIVO DE SUJECION QUE ESTA MONTADO PIVOTANTEMENTE SOBRE EL CARRITO Y DESTINADO A MANIPULAR LA MERCANCIA . EL INVENTO SE CARACTERIZA PORQUE EL APARATO CONSTA ADEMAS DE UN EJE GUIA PIVOTANTE DE SECCION TRANSVERSAL NO REDONDEADA Y QUE SE EXTIENDE EN PARALELO AL RAIL DE TRANSPORTE . UN SEGUIDOR ESTA DISPUESTO GIRATORIAMENTE SOBRE EL CARRITO Y CONECTADO AL EJE GUIA PARA MOVERSE DESLIZANTEMENTE A LO LARGO DEL MISMO PERO CON TORSION RIGIDA EN UNA DIRECCION RADIAL. UNA TRANSMISION DE ROTACION ANGULAR ESTA DISPUESTA ENTRE EL SEGUIR Y EL DISPOSITIVO DE SUJECION.
PROCEDIMIENTO PARA EL CONTROL DE PROGRAMA, ESPECIALMENTE DE UN ROBOT INDUSTRIAL PARA EL REVESTIMIENTO AUTOMATICO DE PIEZAS.
(01/04/1992) EN EL CONTROL PROGRAMADO DE UN ROBOT DE PINTURA, ESPECIALMENTE PARA CARROCERIAS DE VEHICULOS, DEBE LOGRARSE PARA UNA LOCALIZACION FACIL DE LOS NUMEROSOS PARAMETROS DE REVESTIMIENTO, MEMORIZADOS DURANTE LA ELABORACION DEL PROGRAMA DEL MOVIMIENTOS, UNA ASOCIACION CORRECTA ENTRE EL PUNTO DE VARIACION DEL PARAMETRO DEL PROCESO SOBRE LA PISTA DE MOVIMIENTO, LOS LUGARES CORRESPONDIENTES EN LA CARROCERIA AUTOMATICAMENTE Y LOS RESPECTIVOS PARAMETROS DE REVESTIMIENTO. A TAL EFECTO AL CREAR LA PISTA DE MOVIMIENTO, SE LE ASIGNA A CADA PUNTO DE VARIACION DEL PARAMETRO DEL PROCESO UN DIRECTORIO PROPIO, Y EN BASE AL PROGRAMA DE MOVIMIENTO SE REALIZA UN FICHERO DE PARAMETROS ESPECIAL, EN EL QUE A LOS DISTINTOS DIRECTORIOS SE LES ASOCIAN LOS CORRESPONDIENTES PARAMETROS DE REVESTIMIENTO. ES DE SUMA IMPORTANCIA…
APARATO MANIPULADOR DE INGRAVIDEZ PERFECCIONADO.
(16/06/1990) APARATO MANIPULADOR DE INGRAVIDEZ PERFECCIONADO, DE LOS CONSTITUIDOS POR UN APOYO-EJE VERTICAL RESPECTO DEL CUAL EFECTUA GIROS DE 360G UNA TORRETA QUE LLEVA UNA PLUMA RADIAL ARTICULABLE EN SU PLANO VERTICAL Y ESTRUCTURADA SEGUN UN PARALELOGRAMO ARTICULADO FORMADO POR BARRAS RADIALES SUPERIOR E INFERIOR QUE EN SU EXTREMO TRASERO UBICADO EN LA TORRETA ESTAN UNIDAS POR UNA BARRETA OSCILANTE Y EN SU EXTREMO DELANTERO LIBRE POR LA BARRA SUSPENSORA DE LA CARGA A MANIPULAR, CARACTERIZADO PORQUE APOYADOS POR LA PARTE EXTREMA SOBRE DICHAS BARRAS RADIAL SUPERIOR Y SUSPENSORA , Y MEDIANTE RESPECTIVOS ADICIONALES TIRANTES RADIAL Y SUSPENSOR , ESTAN GENERADOS…
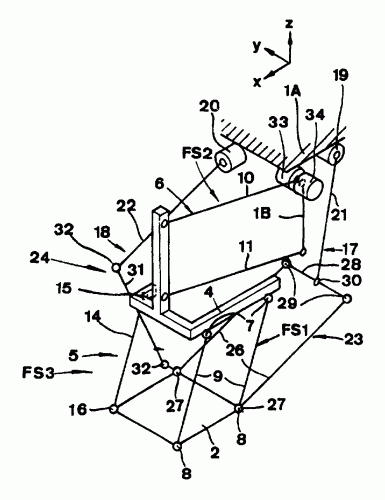
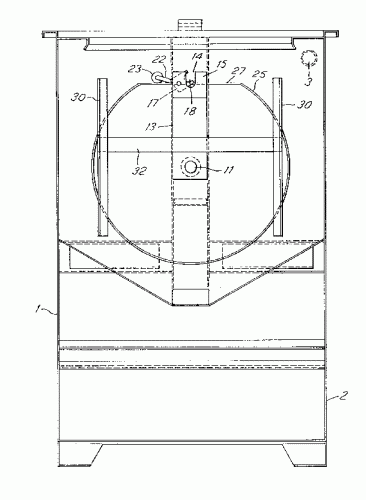
APARATO PARA LA MANIPULACION INDUSTRIAL DE OBJETOS.
(01/11/1989). Ver ilustración. Solicitante/s: YOUNG, PETER DAVID.
APARATO PARA LA MANIPULACION INDUSTRIAL DE OBJETOS QUE COMPRENDE UN SOPORTE EN EL CUAL PUEDE BAJARSE UN OBJETO Y DEL QUE PUEDE ELEVARSE ESTE Y QUE PUEDE HACER QUE EL OBJETO GIRE ALREDEDOR DE UN EJE GEOMETRICO HORIZONTAL, COMPRENDIENDO EL OBJETO UN SALIENTE EN AL MENOS UNO DE SUS LADOS, COMPRENDIENDO EL SOPORTE UN ELEMENTO SUSCEPTIBLE DE ROTACION ALREDEDOR DEL EJE GEOMETRICO Y DOTADO DE UN CANAL ABIERTO HACIA AFUERA PARA RECIBIR EL SALIENTE CUANDO EL OBJETO BAJA A SU POSICION, Y UN ENGANCHE PARA RETENER EL SALIENTE EN EL CANAL, AUTOMATICAMENTE, EN RESPUESTA A UN MOVIMIENTO ROTATIVO PREDETERMINADO DEL ELEMENTO Y DEL OBJETO FUERA DE LA POSICION DE CARGA Y DESCARGA DE MODO QUE EL OBJETO QUEDA RETENIDO DURANTE LA ROTACION. EL USO PREFERIDO ES PARA SOSTENER CESTOS DE PIEZAS FUNDIDAS IMPREGNADAS EN UN RECINTO PARA SU ESCURRIDO, LAVADO CON AGUA FRIA O CURADO CON AGUA CALIENTE.
DISPOSITIVO PARA LA RECUPERACION Y PLANCHADO DE ESQUINAS DOBLADAS DE PAPEL.
(01/06/1989) DISPOSITIVO PARA LA RECUPERACION Y PLANCHADO DE ESQUINAS DOBLADAS DE PAPEL, QUE TENIENDO POR FINALIDAD CONSEGUIR LA PLANITUD DE ESQUINAS DOBLADAS Y/O DETERIORADAS QUE SE ORIGINEN EN DETERMINADOS PAPELES O CUBIERTAS DESTINADAS A SOPORTAR Y PROTEGER DOCUMENTOS DE VALOR, SE CARACTERIZA PORQUE SE CONSTITUYE A PARTIR DE UNA BASE GENERAL MONTADA SOBRE UN BASTIDOR DE SUSTENTACION; HABIENDOSE PREVISTO QUE SOBRE TAL BASE VAYAN ARTICULADOS, POR UNO DE SUS EXTREMOS, UNA PAREJA DE BRAZOS O DEDOS QUE DISCURREN PARALELAMENTE ENTRE SI, Y EN CUYO EXTREMO LIBRE SON PORTADORES TALES BRAZOS DE UNA MORDAZA, DE TAL MANERA QUE AMBAS MORDAZAS QUEDAN POSICIONADAS ENFRENTADAMENTE Y EN CONTACTO…
PERFECCIONAMIENTOS EN UN MANIPULADOR DE PIEZAS DE TRABAJO.
(01/01/1985). Solicitante/s: DART INDUSTRIES INC..
PERFECCIONAMIENTOS EN UN MANIPULADOR DE PIEZAS DE TRABAJO.COMPRENDEN UNA PORCION DE BASE ; UN BRAZO EXTENSIBLE MONTADO EN UN EXTREMO DE LA PORCION DE BASE Y COMPRENDE UNA MULTIPLICIDAD DE PIEZAS TUBULARES TELESCOPABLES EXTENDIBLES Y RETRACTILES ; UN CABLE ALOJADO DENTRO DE LAS PIEZAS TELESCOPABLES; UN TAMBOR PARA CABLES; UN DISPOSITIVO ACCIONADOR DEL TAMBOR PARA GIRAR EL TAMBOR QUE ENROLLA Y DESENROLLA AL CABLE, Y UN DISPOSITIVO QUE SE ACOPLA CON LAS PIEZAS DE TRABAJO Y QUE COMPRENDE DOS COPAS DE SUCCION , FIJADAS EN UNA BARRA HORIZONTAL.
MANIPULADOR AUTOMATICO DE PRECISION PARA EL MONTAJE DE LOS UTILES DE APREHENSION, SOLDADURA Y ANALOGOS EN MAQUINAS INDUSTRIALES.
(01/05/1983). Solicitante/s: SORMEL, SOCIETE ANONYME.
MANIPULADOR AUTOMATICO DE PRECISION PARA MONTAJE DE UTILES DE MAQUINAS INDUSTRIALES. CONSTA DE UN BASTIDOR CON RELACION AL CUAL PUEDE DESPLAZARSE UN ORGANO MOVIL EN LOS DOS SENTIDOS DE UNA MISMA DIRECCION, Y OTRO ORGANO MOVIL MONTADO EN EL INTERIOR DEL ANTERIOR. AMBOS ORGANOS TIENEN FORMA DE MARCO Y SON ACTUADOS MEDIANTE SENDOS MOTORES ELECTRICOS QUE TRANSMITEN EL MOVIMIENTO MEDIANTE UN MECANISMO DE CORREA Y POLEA.
MANIPULADOR PARA LA INSPECCION Y REPARACION A CONTROL REMOTO DE TUBOS INTERCAMBIADORES DE CALOR.
(16/08/1982). Solicitante/s: KRAFTWERK UNION AKTIENGESELLSCHAFT.
MANIPULADOR PARA EL POSICIONAMIENTO A CONTROL REMOTO DE LAS SONDAS TUBULARES. CONSTA DE UN CUERPO SOPORTE FIJABLE SOBRE LAS DESEMBOCADURAS TUBULARES DE LOS TUBOS INTERCAMBIADORES DE CALOR POR MEDIO DE MANDRILES EXPANSIBLES SEPARADOS ENTRE SI; DE UN SOPORTE DISPUESTO SOBRE EL CUERPO SOPORTE Y DESPLAZABLE EN LINEA RECTA SOBRE UNA VIA DE GUIA DE DICHO CUERPO SOPORTE; DE UNA PLUMA GIRATORIA DISPUESTA SOBRE EL SOPORTE EN EL PLANO TRANSVERSAL DEL TUBO; DE UNA BOQUILLA CONECTADA AL EXTREMO LIBRE DE LA PLUMA QUE PUEDE IMPLANTARSE SOBRE LA DESEMBOCADURA TUBULAR RESPECTIVAMENTE ELEGIDA, Y DE UNA MANGUERA FLEXIBLE DE ALIMENTACION CONECTADA A DICHA BOQUILLA.
APARATO DE MANIOBRA A DISTANCIA.
(16/02/1981). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
APARATO AUTOMATICO PARA LA REVISION DE LOS TUBOS DEL GENERADOR DE VAPOR DE UN REACTOR NUCLEAR CONTROLADO A DISTANCIA. CONSTITUIDO POR UN BRAZO MANIPULADOR , UNAS LEVAS Y UNAS GUIAS , PERMITIENDO TODOS LOS MOVIMIENTOS POSIBLES. EL OPERARIO POSEE UN MODELO A ESCALA PARA PODER PREVER LOS MOVIMIENTOS DEL APARATO EN TODA SU MAGNITUD. EL APARATO POSEE UNOS MEDIOS DE CONTROL REGISTRADOS EN UN PANEL PARA DETECTAR LOS ERRORES EN LAS SOLDADURAS O FISURAS EN TUBOS. LOS MOVIMIENTOS SON PRODUCIDOS POR UNOS ACCIONAMIENTOS HIDRAULICOS.
POSICIONADOR DE SONDA PARA SITUAR SONDAS EN GENERADORES DE VAPOR.
(16/02/1981). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
APARATO CONTROLADO A DISTANCIA PARA EL POSICIONAMIENTO DE SONDAS EN GENERADORES DE VAPOR. CONSTTUIDO POR LA PLACA SOPORTE Y LOS DISPOSITIVOS DE FIJACION DE TIPO DE LEVA, QUE SE INTRODUCEN EN LOS TUBOS CONTROLADOS A DISTANCIA. MEDIANTE LOS BRAZOS Y LOS MANGUITOS SE PERMITE EL MOVIMIENTO DEL APARATO PARA PODER REALIZAR LAS OPERACIONES DE MANTENIMIENTO. LOS MECANISMOS DE ACCIONAMIENTO SE REALIZAN CON UN MOTOR DE AVANCE PASO A PASO. INCLUYE, ADEMAS, LOS CORRESPONDIENTES CIRCUITOS DE REGISTRO DE LA INFORMACION SOBRE EL ESTADO DE LOS TUBOS. DE APLICACION EN CENTRALES NUCLEARES DE PRODUCCION DE ENERGIA ELECTRICA.
BRAZO DE MANIPULADOR CONSTITUIDO POR VARIOS SEGMENTOS,PARA APARATO DE INSPECCION DE VASIJA DE REACTOR NUCLEAR.
(01/09/1979) Aparato de desconexión en caso de emergencia, para el brazo manipulador segmentado de un dispositivo de inspección de vasija de reactor nuclear, siendo dicho aparato capaz de cambiar la orientación normal del brazo manipulador a una orientación más corta que permite la extracción segura del dispositivo de inspección fuera de la vasija del reactor, que incluye: una envoltura de motor; un primer dispositivo de soporte para conectar dicha envoltura de motor en un punto intermedio del brazo manipulador con un primer segmento del mismo; un segundo dispositivo de soporte para conectar dicha envoltura de motor con un segundo segmento del brazo manipulador; una pestaña perforada y un fiador acoplado con ella para acoplar de manera desarmable dicha envoltura de motor con una primera porción de dicho segundo dispositivo de soporte como parte de la…
UN EQUIPO PARA MEJORAR LAS OPERACIONES DE MANEJO Y ACOPLE DE CARGAS PESADAS.
(01/02/1976). Solicitante/s: RODRIGUEZ PLA Y GOMEZ GUERRERO,P. Y M.
Resumen no disponible.
{kind=link}
{kind=link}