DISPOSITIVO PARA EL DESPLAZAMIENTO RELATIVO DE DOS ELEMENTOS.
Un dispositivo para el desplazamiento relativo de dos elementos que comprende un arreglo de enlace (5q;
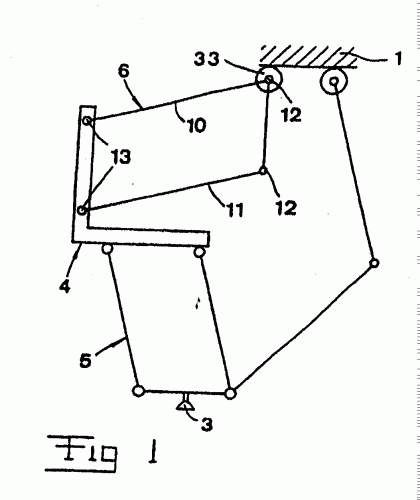
5r) y un arreglo de desplazamiento (6q; 6r) conectado con el arreglo de enlace (5q; 5r), estando proporcionado el arreglo de desplazamiento (6q; 6r) entre el arreglo de enlace (5q; 5r) y el primero (1q; 1r) de los elementos mientras el arreglo de enlace (5q; 5r) está proporcionado entre el arreglo de desplazamiento y el segundo (2q; 2r) de los elementos, estando formado el segundo elemento por el elemento portador ó funcional (3q; 3r), el arreglo de enlace (5q; 5r) que comprende por lo menos tres enlaces (9q, 14q; 94, 14r) está contactado de manera giratoria a través de las juntas (7, 8, 15, 16) en relación con el arreglo de desplazamiento (6q; 6r) y el segundo elemento (2q; 2r), estando conectados los citados enlaces (9q, 14q; 9r, 14r) en las primeras juntas (7, 15) con el arreglo de desplazamiento (6q; 6r) y en las segundas juntas (8, 16) con el segundo elemento (2q; 2r), estando dispuestas las citadas primeras juntas (7, 15) y las segundas juntas (8, 16, respectivamente, en una configuración triangular y estando los citados enlaces (9q, 14q; 9r, 14r) sustancialmente iguales en su longitud y sustancialmente paralelas, estando adaptado el arreglo de desplazamiento (6q; 6r) para ser amovible en relación con el primer elemento (1q; 1r), comprendiendo los dispositivos los arreglos que aplican la fuerza y estando dispuestos para accionar el arreglo de enlace (5q; 5r) y el arreglo de desplazamiento (6q; 6r) dispuesto para cambiar la posición relativa entre los elementos (1q, 2q; 1r, 2r) mientras que el arreglo de desplazamiento (6q; 6r) tiene forma de un brazo de pivote (100; 100r), el dispositivo comprende el primero y el segundo arreglo que aplica la fuerza (17q, 18q; 17r, 18r) para causar que el segundo elemento se mueva en relación con el brazo giratorio y el tercer arreglo que aplica la fuerza (33q; 33r) para girar el brazo giratorio en relación con el primer elemento, los arreglos que aplican la fuerza y que comprenden los respectivos elemento de aplicación de la fuerza consisten de medios de rotación y los elementos que aplican la fuerza (20q, 33q; 20r, 33r) del segundo y del tercer arreglo que aplican la fuerza (18q, 33q; 18q, 33r) tienen sus estatores asegurados en relación al primer elemento (1q; 1r) y sus rotores están dispuestos con sus ejes de rotación sustancialmente en paralelo.
Tipo: Resumen de patente/invención.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: BJERKENS PATENTBYRA KB P.O.BOX 1274,801 37 GAVLE.
Inventor/es: BROGARDH, TORGNY.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Enero de 1998.
Fecha Concesión Europea: 15 de Marzo de 2006.
Clasificación Internacional de Patentes:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
Países PCT: Suiza, Alemania, España, Francia, Reino Unido, Italia, Liechtensein, Suecia, Oficina Europea de Patentes, Armenia, Azerbayán, Bielorusia, Ghana, Gambia, Kenya, Kirguistán, Kazajstán, Lesotho, República del Moldova, Malawi, Federación de Rusia, Sudán, Tayikistán, Turkmenistán, Uganda, Zimbabwe, Burkina Faso, Benin, República Centroafricana, Congo, Costa de Marfil, Camerún, Gabón, Guinea, Malí, Mauritania, Niger, Senegal, Chad, Togo, Organización Regional Africana de la Propiedad Industrial, Swazilandia, Organización Africana de la Propiedad Intelectual, Organización Eurasiática de Patentes.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]