Robot de amarre.
Un robot (100) de amarre para sujetar de manera liberable un buque amarrado (200) a un muelle (110) o a un segundo buque,
incluyendo el robot (100) de amarre:
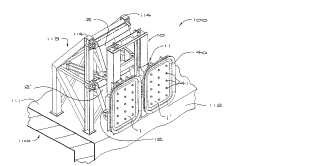
un elemento (1, 1') de acoplamiento atractivo acoplable, de manera liberable, con una superficie para sujetar el buque amarrado (200);
una guía alargada sustancialmente vertical (100) a la cual está fijo de manera deslizante el elemento (1, 1') de acoplamiento, para subir y bajar el elemento (1, 1') de acoplamiento;
un carril (22) sustancialmente horizontal al cual está sujeto, de manera deslizante, el elemento atractivo, estando alineado el carril horizontal (22) en paralelo al eje longitudinal del buque amarrado (200), para el 10 movimiento a proa y a popa del elemento (1, 1') de acoplamiento; y
medios de accionamiento motorizado (4, 23) respectivos, para el movimiento del elemento (1, 1') de acoplamiento en las direcciones vertical, longitudinal y transversal;
caracterizado porque
el robot (100) de amarre incluye una articulación de brazos paralelos que tiene dos brazos paralelos (2, 2') pivotados, cada uno, en torno a ejes respectivos que son paralelos al eje longitudinal del buque amarrado (200), para extender y replegar el elemento (1, 1') de acoplamiento en una dirección transversal, estando los brazos paralelos (2, 2') sujetos de forma pivotante a la guía de vertical (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NZ2002/000062.
Solicitante: Cavotec Moormasters Limited.
Nacionalidad solicitante: Nueva Zelanda.
Dirección: UNIT 9, LEVEL 1 AMURI PARK 404 BARBADOES STREET CHRISTCHURCH NUEVA ZELANDA.
Inventor/es: MONTGOMERY, PETER JAMES, ROSSITER,BRYAN,JOHN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
- B25J15/06 B25J […] › B25J 15/00 Cabezas de aprehensión. › con medios de retención magnéticos o que funcionan por succión.
- B63B21/00 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Aparatos de maniobra; Aparatos de desplazamiento, remolque o empuje; Anclaje (anclaje dinámico B63H 25/00; equipos para embarque en costas, puertos o en otras estructuras marinas fijas, p.ej. para aterrizaje, E02B).
- B63C1/00 B63 […] › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › Puesta en dique seco de buques o hidroaviones (puesta en tierra de embarcaciones por medios diferentes de la puesta en dique seco B63C 15/00; amarre de buques B63B 21/00; bajo el aspecto hidráulico E02B).
- B63C1/10 B63C […] › B63C 1/00 Puesta en dique seco de buques o hidroaviones (puesta en tierra de embarcaciones por medios diferentes de la puesta en dique seco B63C 15/00; amarre de buques B63B 21/00; bajo el aspecto hidráulico E02B). › Aparatos de centrado.
- E02B3/24 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02B HIDRAULICA (elevación de barcos E02C; dragado E02F). › E02B 3/00 Obras relativas al control o a la utilización de los cursos de agua, ríos, costas o cualquier otro emplazamiento marítimo (presas o aliviaderos E02B 7/00 ); Cierres o juntas para trabajos de ingeniería civil en general. › Bitas de amarre.
PDF original: ES-2378984_T3.pdf
Fragmento de la descripción:
Robot de amarre CAMPO TÉCNICO
La presente invención se refiere en general a amarres, y más en particular a dispositivos robóticos de amarre para amarrar grandes buques.
TÉCNICA ANTERIOR
Cuando se amarra a un muelle un buque portacontenedores o un barco grande similar, para impedir daños al barco o al muelle es necesario disponer un robot de amarre que sea adecuadamente fuerte para resistir las fuerzas ejercidas sobre el mismo por la acción del viento, las olas, las embarcaciones de paso y la marea. El robot de amarre debe aceptar, asimismo, el movimiento vertical relativo entre el muelle y el buque, debido a las variaciones en las mareas y al desplazamiento. Además, el robot de amarre debería permitir que la conexión entre el buque y el muelle se haga o se deshaga rápidamente sin daños para el muelle ni para el buque. En vista del gran tamaño de los buques utilizados habitualmente, los elementos de un robot de amarre deben ser eficientes estructuralmente, para evitar la necesidad de proporcionar una estructura grande y pesada para resistir las fuerzas significativas que se presentan. También sería deseable que tuvieran un consumo de energía reducido.
Otra característica deseable de un robot de amarre, tal como el descrito en el documento WO 0162585, es la capacidad de absorber cargas en el plano horizontal (es decir, cargas externas aplicadas en las direcciones de proa a popa, y/o de babor a estribor) para evitar los efectos de impactos que podrían provocar una pérdida de acoplamiento. Asimismo, es un requisito importante la capacidad de controlar con precisión la posición de un buque amarrado.
Sin embargo, una desventaja del robot de amarre del sistema de amarre descrito en el documento WO 0162585, es que el movimiento a proa y a popa, y el movimiento vertical del buque en relación con el robot de amarre, están acompañados por un componente de movimiento de babor a estribor, debido a que el brazo telescópico del robot está sujeto de forma pivotante. Esta característica complica la determinación precisa de la posición de los elementos de acoplamiento, y se añade a la complejidad de controlar el robot de amarre. Asimismo, puesto que el plano de las ventosas de vacío no se mantiene paralelo a la superficie del casco con el que éstas se acoplan, el desgaste adicional de los cierres de vacío puede tener como resultado que las ventosas son pivotadas frecuentemente al iniciar su acoplamiento con el casco. Otra desventaja de dispositivos como éste y similares, es que los brazos telescópicos, que están sometidos a cargas de flexión significativas, deben ser relativamente masivos y que, incluso con los brazos retraídos, el dispositivo requiere una cantidad de espacio significativa en la cara frontal de amarre del muelle.
El documento WO 9114615 describe un dispositivo de amarre que intenta superar algunos de los problemas asociados con los grandes movimientos de flexión ejercidos por el movimiento longitudinal del buque, en paralelo a la cara frontal del muelle. Una de las soluciones propuestas es la incorporación de una junta esférica en una sujeción montada en el buque. Sin embargo, un diseño de este tipo requiere que el dispositivo de amarre sea adaptado especialmente, así como un elevado grado de precisión para alinear los dos componentes del acoplamiento mecánico. Otra solución es tomar las cargas longitudinales a través de líneas de estay, si bien los estays obstruyen un área significativa de la cara frontal del muelle.
Es un objetivo de la presente invención tratar los problemas mencionados o, por lo menos, dar a conocer al público una opción útil.
Otros aspectos y ventajas de la presente invención resultarán evidentes a partir de la siguiente descripción, que se proporciona solamente a modo de ejemplo.
EXPOSICIÓN DE LA INVENCIÓN
De acuerdo con un aspecto de la presente invención, se da a conocer un robot de amarre para fijar de manera liberable un buque amarrado a un muelle o a un segundo buque, incluyendo el robot de amarre:
un elemento de acoplamiento atractivo, acoplable de modo liberable con una superficie para fijar el buque amarrado;
una guía alargada sustancialmente vertical, a la cual está fijo de manera deslizable el elemento de acoplamiento, para subir y bajar el elemento de acoplamiento;
un carril sustancialmente horizontal al cual está fijo de manera deslizante el acoplamiento atractivo, estando el carril horizontal alineado en paralelo a un eje longitudinal del buque amarrado, para el desplazamiento a proa y a popa del elemento de acoplamiento;
una articulación de brazos paralelos que tiene dos brazos paralelos pivotados, cada uno, en torno a ejes respectivos que son paralelos al eje longitudinal del buque amarrado, para extender y replegar el elemento de acoplamiento en la dirección transversal, estando los brazos paralelos fijos de forma pivotante a la guía vertical; y respectivos medios de accionamiento motorizados para el movimiento del elemento de acoplamiento en las direcciones vertical, longitudinal y transversal.
Preferentemente, el robot de amarre está fijo a una estructura de montaje en el muelle. Los brazos paralelos están conectados entre la estructura y la guía para desplazar la guía transversalmente y para mantener la guía vertical durante el movimiento pivotante de los brazos. El robot de amarre incluye además un carro que se acopla con la guía vertical, y en el que el carril horizontal se fija al carro y recibe de forma deslizante una sub-estructura a la cual está sujeto el elemento de acoplamiento.
Preferentemente, el elemento atractivo incluye ventosas de vacío, que tienen cada una juntas elastoméricas circunferenciales que definen una cara sustancialmente plana para el acoplamiento con una sección correspondiente del francobordo del buque amarrado.
En una realización preferida, el robot de amarre está montado en un muelle fijo o flotante. Alternativamente, en caso de que el robot de amarre esté montado en el buque amarrado, la superficie puede ser, por ejemplo, una placa sujeta a un muelle.
Preferentemente, el medio de accionamiento de la articulación de los brazos paralelos es un accionador lineal que está conectado de forma pivotante entre la estructura y la guía vertical. Levas hidráulicas de doble efecto pueden proporcionar el medio de accionamiento para la articulación de brazos paralelos, en la dirección transversal, y para el movimiento del elemento de acoplamiento en relación con el carril, en la dirección longitudinal. Preferentemente, un acumulador hidráulico está conectado a ambas levas para proporcionar una acción elástica que tiende a restablecerlos a una posición operativa predefinida.
Preferentemente, se utiliza un motor hidráulico que acciona un bucle de cadena fijado al carro, para subir y bajar el carro sujeto a la guía, si bien se apreciará que pueden utilizarse asimismo otros accionadores lineales. Se disponen medios para fijar el carro con respecto a la guía y, asimismo, para permitirle ascender y descender de manera sustancialmente libre cuando se requiera en funcionamiento.
Preferentemente, una junta esférica permite un grado limitado de movimiento pivotante de los elementos de acoplamiento en relación con el robot de amarre. Opcionalmente, puede utilizarse una junta universal o un elemento elástico para proporcionar este grado limitado de movimiento pivotante.
De acuerdo con otro aspecto de la presente invención, se da a conocer un sistema de amarre que comprende, por lo menos, un robot de amarre sustancialmente tal como se ha descrito anteriormente, en el que el funcionamiento de cada robot de amarre está controlado por un controlador remoto.
De acuerdo con otro aspecto de la presente invención, se da a conocer un método de funcionamiento de un sistema de amarre para impulsar el buque en una dirección longitudinal con objeto de volver a situarlo a lo largo del muelle, que incluye las etapas de:
a) proporcionar un sistema de amarre sustancialmente tal como el descrito anteriormente;
b) determinar la distancia y el sentido deseados a los que el barco debe ser desplazado longitudinalmente;
c) para cada robot de amarre, por turnos, separar secuencialmente el elemento de acoplamiento respecto del casco, desplazar el elemento de acoplamiento hasta su alcance de desplazamiento longitudinal en un sentido opuesto al sentido deseado y, a continuación, volver a acoplar el elemento... [Seguir leyendo]
Reivindicaciones:
1. Un robot (100) de amarre para sujetar de manera liberable un buque amarrado (200) a un muelle (110) o a un segundo buque, incluyendo el robot (100) de amarre:
un elemento (1, 1') de acoplamiento atractivo acoplable, de manera liberable, con una superficie para sujetar el buque amarrado (200) ;
una guía alargada sustancialmente vertical (100) a la cual está fijo de manera deslizante el elemento (1, 1') de acoplamiento, para subir y bajar el elemento (1, 1') de acoplamiento;
un carril (22) sustancialmente horizontal al cual está sujeto, de manera deslizante, el elemento atractivo, estando alineado el carril horizontal (22) en paralelo al eje longitudinal del buque amarrado (200) , para el movimiento a proa y a popa del elemento (1, 1') de acoplamiento; y medios de accionamiento motorizado (4, 23) respectivos, para el movimiento del elemento (1, 1') de acoplamiento en las direcciones vertical, longitudinal y transversal;
caracterizado porque el robot (100) de amarre incluye una articulación de brazos paralelos que tiene dos brazos paralelos (2, 2') pivotados, cada uno, en torno a ejes respectivos que son paralelos al eje longitudinal del buque amarrado (200) , para extender y replegar el elemento (1, 1') de acoplamiento en una dirección transversal, estando los brazos paralelos (2, 2') sujetos de forma pivotante a la guía de vertical (10) .
2. El robot (100) de amarre, según la reivindicación 1, fijado a una estructura de montaje en el muelle (110) , en el que los brazos paralelos (2, 2') están conectados entre la estructura y la guía (10) para desplazar la guía (10) transversalmente y mantener la guía (10) vertical durante el movimiento pivotante de los brazos; incluyendo además el robot (100) de amarre un carro (11) que se acopla con la guía vertical (10) , y el carril horizontal (22) está sujeto al carro (11) y recibe, de forma deslizante, una sub-estructura (11) a la cual está fijado el elemento (1, 1') de acoplamiento.
3. El robot (100) de amarre, según la reivindicación 1 o la reivindicación 2, en el que dicha superficie es sustancialmente plana y, por lo menos, parte del elemento (1, 1') de acoplamiento define una cara sustancialmente plana correspondiente, manteniendo la articulación de brazos paralelos la cara plana sustancialmente paralela a la superficie, durante todo el movimiento transversal del elemento (1, 1') de acoplamiento.
4. El robot (100) de amarre, según cualquiera de las reivindicaciones 1 a 3, en el que el robot (100) de amarre está montado en un muelle fijo o flotante (110) .
5. El robot (100) de amarre, según cualquiera de las reivindicaciones 1 a 4, en el que el elemento (1, 1') de acoplamiento comprende una o varias ventosas (1, 1') de vacío, y dicha superficie es una sección del francobordo del buque amarrado (200) .
6. El robot (100) de amarre, según cualquiera de las reivindicaciones 2 a 5, en el que el medio (4) de accionamiento de la articulación de brazos paralelos es un accionador lineal (4) conectado de forma pivotante entre la estructura y la guía vertical (10) .
7. El robot (100) de amarre, según cualquiera de las reivindicaciones 1 a 6, en el que las levas hidráulicas (4, 23) de doble efecto proporcionan los medios de accionamiento (4, 23) para la articulación de brazos paralelos en la dirección transversal, y el desplazamiento del elemento (1, 1') de acoplamiento en relación con el carril (22) en la dirección longitudinal.
8. El robot (100) de amarre, según la reivindicación 7, en el que el accionador hidráulico está conectado a ambas levas para proporcionar una acción elástica que tiende a devolverlas a una posición de funcionamiento predefinida.
9. El robot (100) de amarre, según la reivindicación 2, o la reivindicación 2 y cualquiera de las reivindicaciones 1 a 8, que comprende además medios para fijar el carro (11) con respecto a la guía (10) y, asimismo, para permitirle ascender y descender de manera sustancialmente libre cuando el funcionamiento lo requiera.
10. Un sistema de amarre que comprende uno o varios robots (100) de amarre, según cualquiera de las reivindicaciones 1 a 9, en el que el funcionamiento de cada robot (100) de amarre está controlado por un controlador remoto.
11. El sistema de amarre, según la reivindicación 10, en el que cuatro robots (100) de amarre están montados en un muelle (110) , en dos pares.
12. Método de manejo de un sistema de amarre para impulsar un buque (200) en una dirección longitudinal para volver a situarlo a lo largo del muelle (110) , que incluye las etapas de:
a) proporcionar un sistema de amarre, según la reivindicación 11;
b) determinar la distancia y el sentido deseados a los que el barco (200) debe ser desplazado longitudinalmente;
c) para cada robot (100) de amarre, por turnos, separar secuencialmente el elemento (1, 1') de acoplamiento respecto del casco, desplazar el elemento (1, 1') de acoplamiento a su alcance de recorrido longitudinal en sentido opuesto al sentido deseado y, a continuación, volver a acoplar el elemento (1, 1') de acoplamiento;
d) impulsar cada elemento (1, 1') de acoplamiento en el sentido deseado; y e) repetir las etapas c) y d) hasta que se alcanza la posición deseada.
13. El método de funcionamiento de un sistema de amarre, según la reivindicación 12, que incluye además la etapa 15 de:
f) desplazar secuencialmente cada elemento (1, 1') de acoplamiento a una posición neutra, tal como se ha definido anteriormente.
Patentes similares o relacionadas:
Ancla marina, del 24 de Junio de 2020, de Michael Arthur Baker, Donna Ann Baker And New Zealand Trustees Services Limited: Un ancla, que comprende: • una carcasa sustancialmente no conductora, que incluye una serie de aberturas de pinza; • unos torones elásticos flexibles; […]
Dispositivo de sujeción de cables de amarre hidráulico, sistema y método, del 3 de Junio de 2020, de ShoreTension Holding B.V: Un sistema de amarre hidráulico que comprende al menos dos dispositivos de sujeción de cables de amarre hidráulicos (14a, b), ubicados en un […]
Dispositivo de amarre para un vehículo submarino, sistema de amarre y base de recuperación, del 11 de Diciembre de 2019, de NAVAL GROUP: Dispositivo de amarre para un vehículo submarino provisto de un dispositivo de enganche , comprendiendo el dispositivo de amarre un […]
 Unidad de amarre para amarrar un barco, del 25 de Septiembre de 2019, de EUROPEAN INTELLIGENCE B.V: La unidad de amarre para amarrar un barco, la unidad de amarre comprende una base , un brazo montado sobre la base y un gancho soportado por el brazo […]
Unidad de amarre para amarrar un barco, del 25 de Septiembre de 2019, de EUROPEAN INTELLIGENCE B.V: La unidad de amarre para amarrar un barco, la unidad de amarre comprende una base , un brazo montado sobre la base y un gancho soportado por el brazo […]
Línea de anclaje para soporte flotante que comprende un dispositivo elástico, del 15 de Mayo de 2019, de IFP ENERGIES NOUVELLES: Línea de anclaje para soporte flotante que comprende al menos un dispositivo elástico caracterizada porque dicho dispositivo elástico comprende: - un primer […]
Dispositivo para la fijación de cuerpos flotantes, del 3 de Diciembre de 2018, de Dual Docker GmbH: Dispositivo para la fijación de cuerpos flotantes , en particular embarcaciones y pasarelas, a un cuerpo de desembarco con al menos dos árboles de sujeción formados […]
 Amarre flotante móvil, del 5 de Octubre de 2018, de Marantier, Frédéric M: Amarre flotante móvil que incluye al menos un conjunto de n barreras flotantes paralelas, siendo n un número entero mayor que 1 y comprendiendo cada barrera flotante […]
Amarre flotante móvil, del 5 de Octubre de 2018, de Marantier, Frédéric M: Amarre flotante móvil que incluye al menos un conjunto de n barreras flotantes paralelas, siendo n un número entero mayor que 1 y comprendiendo cada barrera flotante […]
Dispositivo para sujetar cuerpos flotantes, del 18 de Octubre de 2017, de Dual Docker GmbH: Dispositivo para sujetar cuerpos flotantes , en particular pantalanes y barcas, con al menos un pantalán flotante con al menos un cuerpo de sustentación […]