Estación robótica interactiva para la preparación y dispensación de bebidas, en especial cócteles.
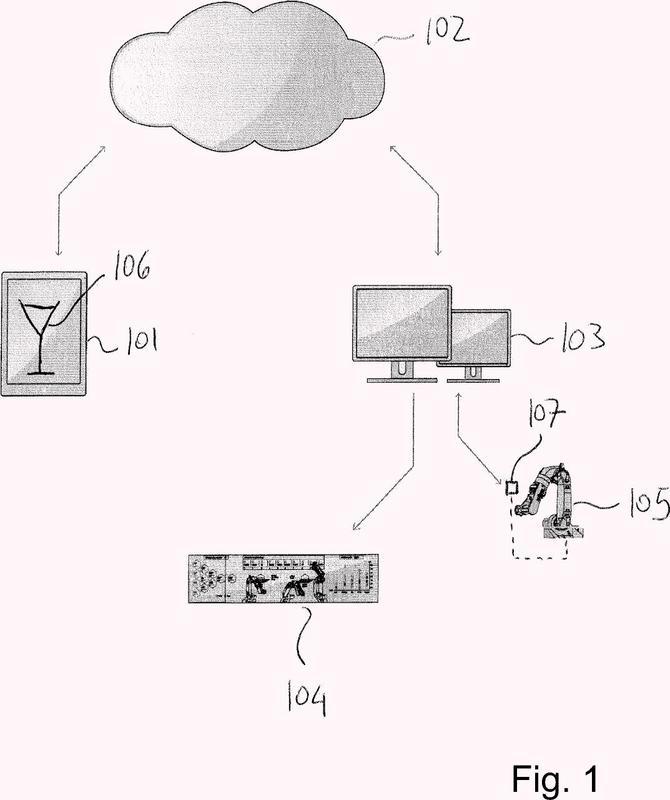
Una estación de preparación de bebidas interactiva que comprende una interfaz (101) de entrada de usuario para pedir una bebida,
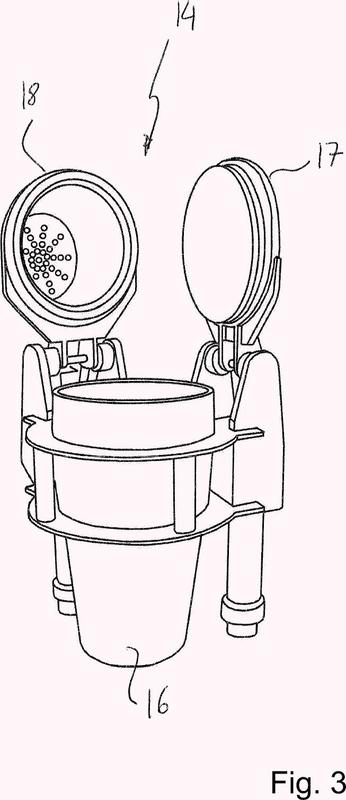
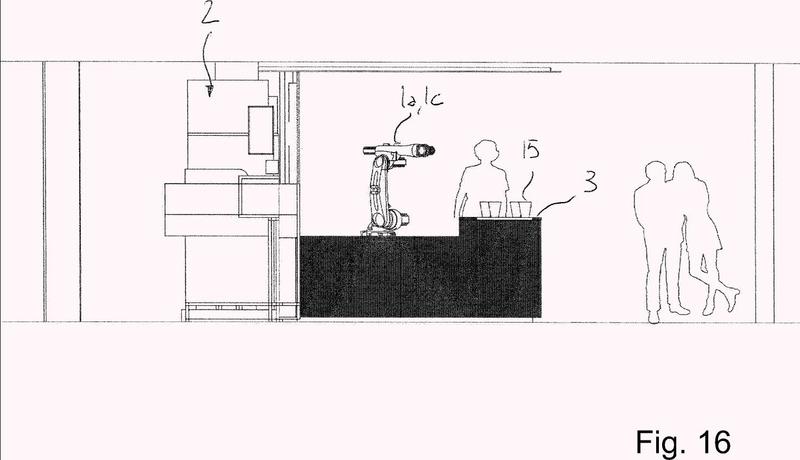
una estación robótica (105) para recoger ingredientes en función del pedido, mezclar los ingredientes y verter la bebida en un recipiente (15) abierto en la parte superior, una zona (4, 4') de recogida donde el usuario recibe el recipiente (15) abierto en la parte superior de la estación robótica (105) y una unidad (103) de control para controlar automáticamente la estación robótica (105) en función de las entradas desde la interfaz (101) de entrada para preparar la bebida correspondiente al pedido de bebida, en donde la estación robótica (105) comprende, al menos, un brazo robótico (1) que tiene un receptor final (14) para recoger los ingredientes y realizar las operaciones de un barman, incluidas al menos una de batir y/o revolver y/o mezclar y/o filtrar, caracterizada por que el receptor final (14) comprende una base (16) para recibir ingredientes y una tapa accionada (17) controlada por la unidad (103) de control para cerrar de forma estanca la base (16).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2014/060534.
Solicitante: Ratti, Carlo Filippo.
Nacionalidad solicitante: Italia.
Dirección: Corso Quintino Sella, 26 Torino ITALIA.
Inventor/es: RATTI,CARLO FILIPPO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
PDF original: ES-2625556_T3.pdf
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Control de movimiento de los conjuntos de robot de seguimiento que fabrican aeronaves, del 15 de Enero de 2020, de THE BOEING COMPANY: Un método que comprende: disponer un conjunto de robot móvil próximo a un fuselaje de una aeronave que se ensambla y configura para […]
Robot humanoide con capacidades para evitar colisiones y de recuperación de trayectoria, del 25 de Diciembre de 2019, de Softbank Robotics Europe: Un procedimiento de control de una trayectoria (530a, 730) de al menos uno de los miembros superiores e inferiores de un robot humanoide, comprendiendo dicho […]
Sistema y método para transportar recipientes de muestras, del 25 de Diciembre de 2019, de BECKMAN COULTER, INC.: Sistema para transportar recipientes de muestras que comprende: una unidad de gestor que comprende una zona de distribución y uno o más […]