Robot submarino humanoide transformable.
Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV".
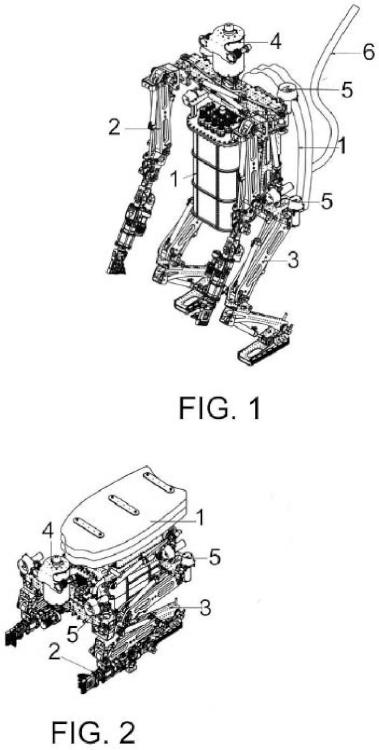
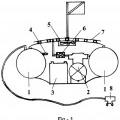
La transformación se sucede desde una configuración humanoide en la cual el robot inclina el tronco (1) hacia adelante y flexiona las patas (3), manteniendo erguida la cabeza (4), de manera que la maniobra culmina en un postura en la que el robot se agacha, mientras que las siguiente fases implican la flexión completa del torso (1) coordinada esta acción con la flexión de los brazos (2), mientras la cabeza (4) continúa erguida. El proceso opuesto de transformación es igualmente posible en el orden inverso.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430253.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: ARACIL SANTONJA, RAFAEL, POLETTI RUIZ,Gabriel Armando, EJARQUE RINALDINI,Gonzalo, SALTAREN PAZMIÑO,Roque.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
- B62D57/04 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › que tienen medios de propulsión diferentes de los contactos con el suelo, p. ej. por hélices (instalaciones de conjuntos reactores de propulsión B60K).
- B63C11/00 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
- B63G8/00 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un robot submarino humanoide que puede navegar
adoptando la configuración de un vehículo submarino operado remotamente (Remotely Operated Vehicle: ROV) , ó que puede cambiar su configuración, transformándose desde una configuración de vehículo ROV a una configuración de robot humanoide, con patas y brazos, para desplazarse sobre el fondo marino con movimientos homínidos o trepar a lo largo de una construcción submarina mediante el uso de sus extremidades formadas por
patas y brazos.
El objeto de la invención es proporcionar un único dispositivo o robot se puedan combinar funcionalidades de navegación, manipulación y desplazamiento en cualquier dirección.
ANTECEDENTES DE LA INVENCIÓN
Los trabajos que deben realizarse sobre estructuras bajo agua como cascos de barcos, estructuras de plataformas petrolíferas, bases de construcciones civiles como puertos,
columnas de puentes, presas, o fondos marinos en general, requieren de dispositivos que se puedan desplazar apoyándose sobre la superficie de trabajo.
Existe una importante diferencia en las características técnicas de los trabajos en entornos submarinos.
Por una parte están los trabajos submarinos que implican navegar impulsándose en el agua, por ejemplo en trabajos de exploración, toma de muestras, trabajos mecánicos en entornos relativamente diáfanos, etc. Frecuentemente caracterizados por obstáculos laterales o porque se realizan a distancia o puntualmente sobre un entorno concreto de una superficie;
en todos estos casos se utilizan vehículos tipo ROV. Los cuales a menudo pueden portar
brazos mecánicos y herramientas de trabajo. Los movimientos de estos vehículos están caracterizados por un alto grado de dificultad en las maniobras de navegación, en especial las de manipulación, por estar implicados varios factores como son las perturbaciones causadas por las corrientes marinas, colisiones con salientes de obstáculos, etc. En cualquier caso los vehículos tipo ROV no son aptos para desplazarse ni trepar a lo largo de una superficie inmersa, incluso a una distancia corta de ella, los salientes pueden obstaculizar su correcto funcionamiento, afectando la estabilidad de la navegación y pudiendo causar bloqueo del vehículo o serios daños mecánicos por colisiones.
Por otra parte están los trabajos que deben realizarse sobre superficies de cuerpos sumergidos o instalaciones submarinas. A menudo, estos trabajos deben realizarse a lo largo de la superficie en cuestión. En estos casos es necesario que el vehículo se desplace, vinculado por una serie de extremidades a la superficie de trabajo, con el fin de caminar, reptar o deslizarse sobre la misma. Estos requisitos funcionales tienen una implicación sobre la arquitectura del vehículo o dispositivo que debe realizar este tipo de trabajos. En esencia se trataría de un dispositivo con varias extremidades que se apoyarían sobre la superficie con capacidad de sujetarse, para dar estabilidad al desplazamiento y al trabajo que se debe realizar.
En la técnica actual no existe un dispositivo submarino que reúna estas características de navegar-manipular-caminar.
Un estudio del estado de la técnica indica que los robots que navegan desarrollados para trabajos en entornos submarinos son conocidos en el estado de la técnica como ROV. Los vehículos submarinos, también llamados robots ROV (notación anglosajona para Remotely Operated Vehicle) se diferencian de otros tipos de dispositivos submarinos porque están conectados con su centro de control mediante un cable umbilical a través del cual se le suministra potencia y se establecen las comunicaciones bidireccionales de datos de control y monitorización de la actividad.
Existen patentes de vehículos submarinos que estan relacionados con ROVs, pudiendo destacar la patente US2012210926 (A1) , que presenta un ROV típico basado en su alimentación por cordón umbilical y múltiples impulsores en los ejes coordenados. Tomando este caso hay una serie de patentes que presentan robots submarinos de semejantes morfologías, pero nunca como robots que se pueden transformar como ROVs o robots
humanoides. En general y en consecuencia, ninguna patente refleja la invención de un robot ROV que se puede transformar en un robot humanoide.
DESCRIPCIÓN DE LA INVENCIÓN
El robot submarino humanoide transformable en ROV para trabajos en fondos marinos y en construcciones marinas, es un robot con morfología humanoide que se corresponde con las proporciones cinemáticas de un homínido del tipo chimpancé, con unas extremidades inferiores ideales para desplazarse y unas extremidades superiores para realizar trabajos y/o para desplazarse y trepar haciendo uso de todas sus extremidades.
El robot tiene al menos 23 grados de libertad servo accionados hidráulicamente. Mediante este número de grados de libertad en conjunción con su diseño cinemático, el robot puede configurarse de dos maneras. El robot puede estar en la configuración de ROV para navegar, mediante impulsores marinos a hélice estratégicamente situados, o en la configuración humanoide si el robot despliega sus extremidades para desplazarse mediante movimientos homínidos, funcionalidad que corresponde a desplazarse por superficies escabrosas mediante sus patas con la ayuda de los brazos (extremidades inferiores y
superiores) .
La razón para tener este tipo de capacidad de transformación en ROV o humanoide, obedece a que en los entornos submarinos para desplazarse de un lugar a otro en una distancia importante, es preferible navegar mediante el uso de impulsores marinos. La navegación por lo tanto es inherente a cubrir distancias importantes en un entorno de trabajo. Cuando el trabajo submarino esta caracterizado por operaciones sobre entornos locales de fondos marinos o sobre estructuras o construcciones submarinas, entonces es preferible desplazarse apoyándose y sujetándose, si es el caso, sobre la superficie, lo cual implica que no se puede navegar por el contacto sólido entre el robot y el medio.
El robot es movido por actuación servo hidráulica y esta formado por un tronco, un par de patas un par de brazos y una cabeza. El robot tiene al menos 23 grados de libertad actuados por un conjunto de servo válvulas y accionamientos hidráulicos.
El tronco del robot esta formado por un recipiente estanco en el se encuentra alojado el
sistema de control. El sistema de control del robot esta formado por una arreglo de al menos 23 servo válvulas ensambladas sobre una placa distribuidora que concentra las conexiones a todos los actuadores hidráulicos. También en el sistema de control se encuentra el computador de abordo para el servo control en tiempo real de múltiples ejes. También en el tronco se encuentran alojados el sistema de sensores necesarios para la navegación y control, como son: sensores de profundidad, sensores para la navegación tales como unidad inercial, compas electrónico, sensores de inundación. Sobre el recipiente del tronco en su parte superior están dispuestas todas las conexiones para los circuitos hidráulicos, las conexiones eléctricas de potencia y control y el cordón umbilical que conecta el robot con el centro de mando externo.
Ensamblados sobre el tronco del robot se encuentran las interfaces mecánicas que hacen de “cadera” humanoide, “hombro” humanoide y cabeza.
Sobre las interfaces mecánicas, que se denominarán soportes de la cadera, se encuentran ensamblados a cada lado un par de patas articuladas y servo accionadas hidráulicamente, en cada articulación de la pata se encuentran ensamblados sensores de posición rotativos estancos. Cada pata esta formada por tres eslabones articulados y un pie con talón servo actuado.
Cada par de brazos esta soportado por una estructura que hace las veces de hombro. Cada brazo completo es actuado por un servo accionamiento dispuesto en la estructura del hombro. Esta articulación sirve para abrir o cerrar el mecanismo completo del brazo. La cadena cinemática del eslabón correspondiente al brazo, esta formado por el brazo, antebrazo, la muñeca y la mano. Individualmente cada elemento del mecanismo del brazo es accionado por sendos servo accionamientos. La cadena cinemática del brazo, empieza por un eslabón servo actuado articulado al hombro también llamado brazo. A continuación del brazo está el antebrazo con tres grados de libertad servo actuados, en el extremo del antebrazo hay una muñeca rotatoria servo actuada, que tiene adosada una garra similar a una mano que también es servo actuada. Por lo anterior cada brazo, a partir del hombro, dispone de siete grados de libertad.
...
Reivindicaciones:
1ª. Robot submarino humanoide transformable, donde la transformación permite configurar un vehículo submarino operado remotamente, o un robot humanoide, caracterizado porque se constituye a partir de un tronco (1) con brazos o extremidades superiores (2) y patas o extremidades inferiores (3) , incluyendo además una cabeza (4) así como unos impulsores subacuaticos de hélice (5) y un cordón umbilical (6) para transmisión de datos y potencias eléctricas e hidráulicas, todo ello para que en la configuración humanoide propiamente dicha el robot pueda desplazarse sobre el fondo marino con movimientos propios de los homínidos e incluso trepar o reptar a lo largo de una superficie submarina mediante el uso de sus extremidades o brazos (2) y patas (3) , asi como navegar como un vehículo submarino operado remotamente, tras el plegado sobre su correspondiente tronco (1) de los brazos (2) y patas (3) , manteniendo la cabeza (4) erguida.
2ª. Robot submarino humanoide transformable, según reivindicación 1ª, caracterizado porque las extremidades superiores o brazos (2) presentan una pluralidad de grados de libertad, servo-accionados y controlados por ordenador, estableciéndose eslabones que hacen las veces de espalda (17) , de hombro (19) , de brazo (21) , antebrazo (27) y muñeca (28) junto con la mano, estando dichos eslabones articulados entre sí, a través de articulaciones rotacionales (18) , (19) y (24) del antebrazo completo, habiéndose previsto que tal antebrazo incluya dos articulaciones (25) y (26) que completan los grados de libertad para el movimiento de tipo homínido del brazo correspondiente, mientras que la muñeca presenta una articulación en correspondencia con el antebrazo (27) , que junto con la mano o garra (28) , preferentemente de cinco dedos, son accionados por cables controlados por servo-actuadores (29 y 30) , siendo cada hombro (19) movido por un servo-actuador lineal (20) , mientras que cada brazo (21) es accionado por un servo-actuador (23) , con la particularidad de que los servo-actuadores (29) se encargan de accionar el eslabón rotacional o articulación (26) y el servo actuador con cable (30) para accionamiento de la garra de la mano (28) .
3ª. Robot submarino humanoide transformable, según reivindicaciones 1ª y 2ª, caracterizado porque las extremidades inferiores o patas (3) presentan una pluralidad de grados de libertad servo-accionados para el control de dichas extremidades inferiores, previéndose para ello eslabones (9) , (12) y (15) en correspondencia con juntas rotacionales (7) , (11) y (14) , de manera tal que los movimientos de la correspondiente extremidad inferior
(3) se corresponde con el control de movimiento que imponen los servoactuadores (8) que actúan sobre el eslabón (9) , el servo actuador (10) que actúa sobre el eslabón (12) y el servo actuador (13) que actúa sobre el eslabón (15) .
4ª. Robot submarino humanoide transformable, según reivindicaciones 1ª a 3ª, caracterizado porque la correspondiente cabeza (4) presenta una pluralidad de grados de libertad servoaccionados, incluyendo dicha cabeza (4) sensorse de tipo sónar (33) , así como una cámara de visión (35) y lámpara de iluminación (34) .
5ª. Robot submarino humanoide transformable, según reivindicaciones 1ª a 4ª, caracterizado porque la correspondiente cadena cinemática está determinada por una pluralidad de grados de libertad servo-accionados, permitiendo transformar, mediante una secuencia de configuraciones, que se inicia desde una configuración humanoide, inclinando el tronco y flexionando las extremidades inferiores o patas (3) , manteniendo la cabeza (4)
erguida, hasta alcanzar la condición de agachado, para adoptar una configuración que finaliza en la flexión completa del torso (1) coordinada con la flexión de los brazos o extremidades superiores (2) y patas o extremidades inferiores (3) , manteniéndose erguida la cabeza (4) .
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN, del 4 de Octubre de 2018, de FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO: Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de […]
 Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]
Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]
 VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO, del 3 de Diciembre de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
El vehículo comprende un […]
VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO, del 3 de Diciembre de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
El vehículo comprende un […]
 PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE, del 25 de Enero de 2012, de ARREDONDO DIEZ, JOSE FRANCISCO: Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base […]
PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE, del 25 de Enero de 2012, de ARREDONDO DIEZ, JOSE FRANCISCO: Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base […]
SISTEMA COMBINADO PARA EL REGISTRO Y LA CONSERVACION ARQUEOLOGICA SUBACUATICA IN SITU., del 1 de Octubre de 2005, de UNIVERSIDAD DE CADIZ: Sistema combinado para el registro y la conservación arqueológica subacuática in situ. Permite el registro documental en objetos arqueológicos subacuáticos y […]
COLECTOR SUBMARINO DE CRUDO, del 19 de Septiembre de 2011, de LAZES, RICHARD J.: Colector submarino de fluído, que comprende un contenedor y un dispositivo de posicionamiento de nave que se puede unir a una nave sumergida […]