CIP-2021 : B25J 5/00 : Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad;
manipuladores de control programado B25J 9/00).
CIP-2021 › B › B25 › B25J › B25J 5/00[m] › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 5/02 · que se desplazan sobre un camino-guía.
B25J 5/04 · · en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
B25J 5/06 · Manipuladores combinados con una cabina de control para el operador.
CIP2021: Invenciones publicadas en esta sección.
MÁQUINA ROBOTIZADA Y/O TELECOMANDADA PARA RETIRO E INSERCIÓN DE EQUIPOS SWITCHGEAR, COMPRENDE CHASIS; RUEDAS; SOPORTE; ESTRUCTURA; CÁMARA; Y CONTROLES; Y PROCEDIMIENTO.
(11/06/2015). Ver ilustración. Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: CARMONA ACOSTA,Carlos.
Máquina robotizada y/o telecomandada para retiro e inserción de equipos switchgear que elimina el riesgo de arco eléctrico al operador, comprende: un chasis principal que estructura toda la máquina; un conjunto motriz que permite que la máquina se desplace en el plano completo; un sistema soporte que permite unir el conjunto motriz al chasis; una estructura superior que soporta un mecanismo de tracción para que el equipo switchgear sea retirado e insertado; al menos una cámara de visión; y un tablero de fuerza, un tablero de control y una interfaz hombre máquina, los cuales tienen la función de proveer de energía y control a la máquina robótica. Además, se protege el procedimiento de retiro e inserción del equipo switchgear.
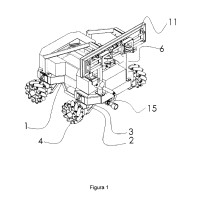
VEHÍCULO ROBOTIZADO TELECOMANDADO.
(28/05/2015). Ver ilustración. Solicitante/s: PROYTECSA SECURITY, S.L. Inventor/es: SALLEN ROSELLO,CESAR.
Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta para su desplazamiento respecto del eje longitudinal del vehículo, de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados sujeta y manipula los objetos a examen.
Robot magnético móvil con hueco de aire.
(18/02/2015) Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis está conectado a un módulo de potencia y a una unidad de decapado, en el que dicho módulo de potencia y dicha una unidad de decapado están conectados a un controlador remoto, en el que dicha unidad de decapado está adaptada para suministrar fluido a presión ultra alta en el intervalo de 240-420 MPa al revestimiento de dicha pieza de trabajo, una cubierta que tiene un sello de fluido adaptada para contactar con dicha pieza de trabajo y confinar dicho fluido, en el que dicha cubierta tiene una guía de escape para eliminar…
Brazo articulado telescópico robotizado.
(23/01/2015) Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico…
Máquina regleadora para nivelar bases de suelos.
(26/11/2014) Máquina regleadora para nivelar bases de suelos, que comprende un bastidor o cuerpo principal (BB), unos medios de soporte y manejo (AA) del bastidor (BB) en al menos dos direcciones, que están interconectados a dicho bastidor o cuerpo (BB), y unos medios de soporte y manejo (CC) de al menos un dispositivo de fresado (DD), que están fijados también a dicho bastidor o cuerpo (BB), teniendo dicho dispositivo de fresado (DD), como parte extrema, al menos una herramienta rodante (EE) adecuada para nivelar y alisar una base de suelo a fin de obtener una superficie acabada sobre la cual sea posible colocar al menos un tipo de superficie de cubierta, en donde dichos…
Dispositivo artificial articulado para la manipulación y el transporte de alimentos.
(06/10/2014) Dispositivo artificial articulado para la manipulación y transporte de alimentos.
Esta invención se refiere a un robot articulado móvil. En particular realiza las tareas de manipulación y transporte de alimentos en lugares de dimensiones reducidas.
El sistema está compuesto por: dos brazos articulados , con sendos motores para moverlos 360º , una cámara de visión artificial , con sendos motores para mover la cámara de visión artificial , una barra fija para la manipulación por humanos , una cesta para introducir los alimentos , una LCD grafica para ver e introducir datos , ocho ruedas para el movimiento con sus sendos motores , una…
Dispositivo de asistencia para portar al menos una herramienta de lijado y/o de pulido.
(06/08/2014) Dispositivo de asistencia para el manejo de al menos una herramienta de lijado y/o de pulido que comprende:
- un bastidor de base ;
- al menos un subconjunto de soporte montado sobre dicho bastidor de tal forma que sea móvil en tres direcciones ortogonales entre sí, estando dicho subconjunto de soporte destinado a soportar una herramienta de lijado , comprendiendo dicho subconjunto de soporte:
- un brazo diseñado para portar dicha herramienta;
- unos medios de accionamiento diseñados para desplazar el brazo sobre dicho bastidor en las tres direcciones;
- unos medios de control de la presión que la herramienta de lijado aplica sobre una superficie de lijado, controlando dichos medios de control los medios de accionamiento, de tal forma que la herramienta ejerza una presión predeterminada…
Cobertura multimodo para un robot autónomo.
(06/08/2014) Un robot móvil , que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos ;
(c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos y a dichos medios de movimiento;
(d) estando configurado dicho sistema de control para hacer funcionar el robot en una pluralidad de modos, comprendiendo dicha pluralidad de modos: un modo de seguimiento de obstáculo mediante el cual dicho robot se desplaza de manera adyacente a un obstáculo, y un modo de rebote mediante el cual el robot se desplaza sustancialmente en una dirección alejándose de un obstáculo después de encontrarse un obstáculo,
caracterizado por que el robot móvil comprende además
sensores de desnivel que impiden que el robot móvil…
Plataforma robótica móvil para la realización de misiones en entornos peligrosos.
(31/01/2014) Plataforma robótica móvil para la realización de misiones en entornos peligrosos.
Consiste en una plataforma robótica móvil dotada de un sistema de tracción mediante dos orugas laterales , cada una de las cuales contiene en su interior una polea delantera , una polea trasera conectada a un motor eléctrico, y un tren de rodadura formado por una serie de rodillos adyacentes conectados a la estructura de la plataforma mediante piezas flexibles independientes que permiten a cada rodillo adaptarse a las irregularidades del terreno sin que la oruga pierda contacto con el suelo. Las poleas disponen de un sistema combinado de tracción y guiado de las orugas,…
Robot móvil con brazo teleoperado mediante sistema inercial de captura de movimientos.
(19/12/2013) Robot móvil con brazo teleoperado mediante sistema inercial de captura de movimientos.
Consiste en un robot móvil autopropulsado , provisto de un brazo articulado teleoperado mediante un sistema que captura los movimientos del operador humano a través de una red de sensores inerciales (2a), (2b), (2c) y (2d) y los envía a una consola de control que proyecta la posición de la mano del operador sobre el espacio de puntos alcanzables por el brazo del robot, calculando los movimientos de las articulaciones del mismo para conseguir que el extremo del brazo del robot describa una trayectoria análoga a la definida por el movimiento del brazo del operador…
SISTEMA DE LIMPIEZA DE PLANTAS DE COLECTORES CILINDRO-PARABÓLICOS Y MÉTODO DE LIMPIEZA QUE EMPLEA DICHO SISTEMA.
(14/03/2013) Sistema de limpieza de plantas de colectores cilindro-parabólicos, formado por vehículos de limpieza , con medios de desplazamiento , medios de limpieza, y medios de accionamiento de éstos. Los vehículos de limpieza son independientes entre sí y autónomos, y presentan medios de navegación , que orientan y dirigen al vehículo de limpieza en su desplazamiento a lo largo de la planta. Los medios de navegación están formados por un sistema de navegación relativo con una unidad inercial y sensores de distancia que miden la distancia del vehículo de limpieza al colector cilindro-parabólico , y un sistema de navegación absoluto, con un subsistema de localización GPS. Un sistema de control integra…
EQUIPO DE COLOCACIÓN DE PINES BRAILLE EN LETREROS DE INFORMACIÓN Y SU PROCEDIMIENTO DE FUNCIONAMIENTO.
(23/10/2012) El equipo preconizado incorpora un robot de tipo móvil capacitado para realizar el taladrado tanto en materiales semi-blandos, como materiales de dureza extrema, para posteriormente insertar unos pines que presentan una superficie adecuada a los caracteres braille y por tanto puede ser leída por personas invidentes. Se añade la ventaja de ser un sistema automatizado pero no solo en taller sino en el mismo punto donde están colocados los letreros, con la particularidad ventaja de no tener que desmontar los letreros donde están colocados si se quiere aprovechar los mismos.
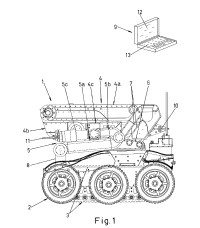
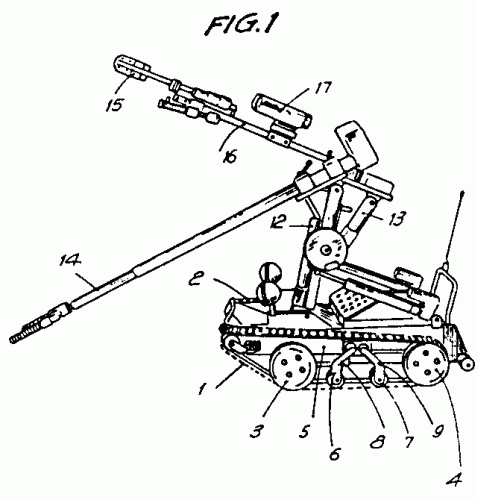
ROBOT TELECOMANDADO PARA OPERACIONES ESPECIALES.
(29/03/2012). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Inventor/es: SALLEN ROSELLO,CESAR, TORRES PUEO,ROBERTO.
Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia,de forma que el robot incorpora sobre el tren de rodadura una torreta , giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria , pudiendo utilizarse para la vigilancia de puntos estratégicos,así como de zonas fronterizas, e incluso, actuar como medio disuasorio al ser portador de, al menos, un arma defensiva intimidatoria.
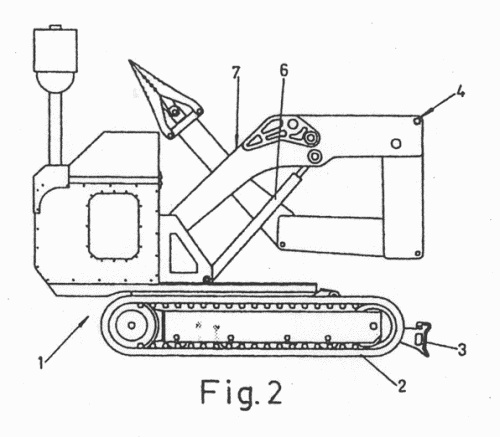
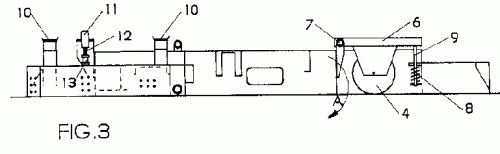
ROBOT AUTOPROPULSADO PARA MANIPULACION DE CARGAS EXPLOSIVAS.
(16/02/2007). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Inventor/es: SALLEN ROSELLO,CESAR, SALLEN ROSELLO,ALFREDO, TORRES PUEO,ROBERTO.
Robot autopropulsado para manipulación de cargas explosivas, siendo del tipo de robots autopropulsados manejados a distancia por medio de una consola de mandos, de utilidad para la manipulación de cargas y artefactos explosivos, así como para la realización de operaciones especiales y peligrosas, de forma que el robot autopropulsado comprende unos medios de desplazamiento definidos por sendos trenes laterales de rodadura de oruga , cuyos laterales de rodadura son graduables, y presentan en su parte anterior una pala de arrastre, de longitud graduable, así como un brazo articulado con el primer tramo del brazo en forma de horquilla accionado por una pareja de cilindros y quedando rematado en una pinza.
SISTEMA MOVIL DE MANIPULACION DE CARGAS MEDIANTE GUIADO.
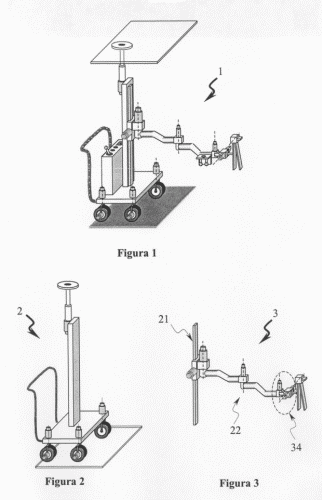
(16/07/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. DE INVEST. CIENTIFICAS. Inventor/es: ARMADA RODRIGUEZ,MANUEL ANGEL, ROS TORRECILLA,SALVADOR, GONZALEZ DE SANTOS,PABLO, JIMENEZ RUIZ,MARIA ANTONIA, ESTREMERA RODRIGO,JOAQUIN, GALVEZ GRISO,JOSE ANTONIO.
Sistema de manipulación de cargas mediante guiado. Sistema móvil de manipulación que, guiado por un operario, asiste a éste en tareas de levantamiento y manipulación de cargas liberándolo del soporte directo de la carga. El sistema es suficientemente ligero para que un operario pueda introducirlo manualmente en el entorno de trabajo, ensamblarlo convenientemente, y cambiarlo de emplazamiento durante la realización de la tarea encomendada.
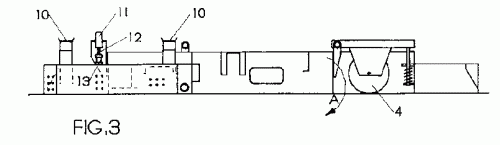
MAQUINA MONTADORA DE PUENTES.
(01/05/2005) 1. Máquina montadora de puentes, caracterizada por estar constituida a partir de una estructura fabricada en material metálico, de configuración prismática hueca, que presenta pronunciaciones provistas de patas de nivelación , incorporando adyacentemente a las patas prolongaciones provistas igualmente de patas de nivelación y disponiendo interiormente de ruedas para su movilización, contando con un puente interno y formando el cuerpo de las zonas de soporte un área de soporte de un receptor donde se incorporan los puentes tratados, realizándose el montaje de dos puentes en canaletas de dos canales mediante la alimentación de los puentes de modo independiente para cada tipo de puente a través de vibradores…
DISPOSITIVO ROBOTICO QUE SE MUEVE CONECTANDO ALTERNATIVAMENTE CADA UNO DE SUS EXTREMOS A ESTACIONES DE ATRAQUE.
(16/04/2005) Un dispositivo de autómata o robot , comprendiendo el dispositivo de robot un cuerpo movible que incorpora, montadas en él, al menos dos partes de acoplamiento separadas , de tal forma que cada parte de acoplamiento incluye medios de conexión de potencia que permiten a la parte de acoplamiento conectarse a otro miembro de acoplamiento, de tal manera que el dispositivo pueda recibir potencia del mismo con el fin de permitir que se produzca el movimiento del miembro de robot por sí mismo, teniendo el dispositivo medios para desplazar dicho cuerpo movible de tal forma que una de las partes de acoplamiento pueda ser acoplada selectivamente a un primer miembro de acoplamiento , siendo entonces…
ROBOT DE DESACTIVACION DE ARTEFACTOS EXPLOSIVOS MINAS Y MUNICIONES.
(16/09/2004) 1. Robot de desactivación de explosivos, minas y municiones que siendo del tipo de ruedas (C), se caracteriza por estar constituido por un chasis (A) de acero inoxidable de forma rectangular con inclinación hacia arriba en su parte delantera baja y con inclinación hacia abajo en su parte delantera alta, al que se le atraviesan con barras redondas de acero inoxidable conformando de esta forma los ejes para la colocación de las ruedas (C) en cada uno de los laterales del chasis, las cuales son atacadas por medio de cadena de transmisión , que engrana en los piñones de cada uno de los motores y en las coronas dentadas de cada una de las ruedas (C). Esta cadena se encuentra tensada por medio de un tensor automático…
ROBOT MANIPULADOR E INSTALACION QUE LO INCLUYE.
(01/07/2004) Robot manipulador motorizado que comprende un primer motor y un brazo manipulador desplazable por medio de este primer motor controlado por una unidad de mando y control , dicho primer motor y dicha unidad se instalan en un bastidor montado sobre unos órganos de rodadura , , el primer motor estando equipado con un árbol de salida rotativo (6a) en el que se dispone de un par mecánico, caracterizado por el hecho de que: - el brazo manipulador está fijado por una de sus extremidades a un cubo provisto de un fileteado axial en el que se introduce atornillada la parte fileteada de un árbol de conducción acoplado al árbol de salida rotativo del primer motor, - un mecanismo de freno está ligado al cubo y al árbol motor , este mecanismo…
VEHICULO ROBOTICO CON CAPACIDAD DE NAVEGACION AUTONOMA DOTADO DE BRAZO ARTICULADO PARA LA MANIPULACION REMOTA DE OBJETOS.
(01/06/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: SIMON MATA,ANTONIO, OLLERO BATURONE,ANIBAL, MARTINEZ RODRIGUEZ,JORGE LUIS, GONZALEZ JIMENEZ,JAVIER, MARTINEZ SANCHEZ,MARIA ALCAZAR, MUÑOZ MARTINEZ,VICTOR, REINA TEROL,ANTONIO JESUS, FERNANDEZ MADRIGAL,JUAN ANTONIO, MUÑOZ RAMIREZ,ANTONIO JOSE.
Vehículo robótico con capacidad de navegación autónoma dotado de brazo articulado para la manipulación remota de objetos. La presente invención consiste en una máquina programable de uso general compuesta de un vehículo con capacidad de navegación en interiores y de un brazo articulado dotado de una garra servo- controlada para el manejo remoto de objetos. El sistema robot comprende un sistema de manipulación autónomo, un sistema de locomoción que emplea ruedas, un sistema sensorial complejo y diverso, un sistema de control basado en una red de computadores, un sistema de alimentación eléctrica por baterías y un sistema de comunicaciones radio con estaciones remotas. El robot está preparado para desenvolverse en entornos estructurados, como edificios, almacenes o fábricas. Las tareas que es capaz de realizar el sistema robot incluyen coger, transportar y soltar pequeños objetos tales como libros o cintas de video y presionar o girar dispositivos sencillos como interruptores o picaportes.
MANIPULADOR DE PIEZAS SOBRE PUESTO DE TRABAJO.
(16/03/2001) 1. MANIPULADOR DE PIEZAS SOBRE PUESTO DE TRABAJO CON UN ELECTROIMAN, UNA PIEZA HIDRAULICA O CUALQUIER OTRO SISTEMA COMO CAPTADOR DE LAS PIEZAS A TRASLADAR, CARACTERIZADO PORQUE SE CONSTITUYE A PARTIR DE UNA ESTRUCTURA GENERAL QUE CONSTA DE UNA BASE CUADRANGULAR DESDE LA QUE SE ALZA UNA COLUMNA QUE SE EXTIENDE DE FORMA PERPENDICULAR HASTA LA MITAD DE SU ALTURA PARA POSTERIORMENTE PRESENTAR UNA LIGERA INCLINACION HACIA EL INTERIOR DE LA BASE, LA COLUMNA FORMA UN CODO EN SU EXTREMO FINAL DESDE DONDE SE SUSTENTA EL CARRIL TRANSVERSAL POR DONDE SE TRASLADA EL CONJUNTO MOVIL. 2. MANIPULADOR DE PIEZAS SOBRE PUESTO DE TRABAJO ACORDE CON LA REIVINDICACION ANTERIOR, CARACTERIZADO PORQUE TODO EL APARELLAJE…
ROBOT AUTONOMO, MOVIL, CON ALTA CAPACIDAD SENSORIAL Y DE PROCESO PARA TRABAJOS COOPERATIVOS.
(16/10/1998). Solicitante/s: UNIVERSIDAD COMPLUTENSE DE MADRID. Inventor/es: MURCIANO CESPEDOSA, ANTONIO, GIRON SIERRA, JOSE MARIA, ZAMORA ROMERO, JAVIER, REVILLAGO EIROS, MARIO, DE LA PAZ LOPEZ, FELIX, MILLAN RUIZ, JOSE DEL ROCIO.
ROBOT AUTONOMO, MOVIL, COOPERATIVO QUE INCLUYE COMUNICACION OMNIDIRECCIONAL RESPECTO A OTROS AGENTES VECINOS; RECEPCION DE MENSAJES DE OTROS AGENTES, DETECTANDO ADEMAS LA DIRECCION DEL AGENTE EMISOR; COMUNICACION GLOBAL DE CADA AGENTE RESPECTO A TODOS LOS AGENTES, Y A LA BASE; DETECCION DE OBJETOS ACARREABLES Y DE OBSTACULOS, DISTINGUIENDO SI ES UNO U OTRO CASO, Y DETERMINANDO LA DIRECCION DONDE SE LOCALIZA; DETECCION DE OTROS AGENTES; DETECCION DE CHOQUES; GEOMETRIA CIRCULAR PARA MINIMIZAR EFECTOS DE CHOQUES; CONTROL DE LA VELOCIDAD Y DE LOS GIROS EN SUS DESPLAZAMIENTOS: CAPTURA Y ACARREO DE OBJETOS, CON GASTO MINIMO DE ENERGIA; DEPOSICION DE OBJETOS EN UN ALMACEN, CUYO SITIO ES CAPAZ DE RECONOCER; AUTOCONCIENCIA DE RANGOS DE DETECCION SENSORIAL, Y DE EDAD ENERGETICA; CONDUCTAS EXPLORATORIAS, ASOCIADAS AL MANEJO DE SENSORES: PROTOCOLOS DE COMUNICACION EN AMBIENTES COOPERATIVOS.
ROBOT PARA LA MANIPULACION DE OBJETOS PELIGROSOS.
(01/03/1998). Ver ilustración. Solicitante/s: MECANIZADOS Y MONTAJES MYM, S.A. Inventor/es: MORILLO MOYA, MARIANO.
ROBOT PARA LA MANIPULACION DE OBJETOS PELIGROSOS. COMPRENDE MEDIOS DE DESPLAZAMIENTO DEL TIPO ORUGA MOVIDOS POR RODILLOS MONTADOS GIRATORIOS EN EL CUERPO DEL ROBOT, UN BRAZO QUE INCLUYE POR LO MENOS UNA PINZA Y UNA CAMARA DE TELEVISION , UNA HORQUILLA UNIDA AL CUERPO DEL ROBOT EN LA CUAL ESTA MONTADO EL BRAZO , MEDIOS DE CONTROL A DISTANCIA DE LOS MEDIOS DE DESPLAZAMIENTO Y DEL MOVIMIENTO DEL BRAZO , Y UN MONITOR DE TELEVISION PARA VISUALIZAR LA ZONA BARRIDA POR LA CAMARA DE TELEVISION . SE CARACTERIZA PORQUE LOS MEDIOS DE DESPLAZAMIENTO COMPRENDEN UN PAR DE RODILLOS AMORTIGUADORES EN CADA UNA DE LAS ORUGAS . PREFERENTEMENTE, COMPRENDE UNA SEGUNDA HORQUILLA PARA EL ACOPLAMIENTO DEL CORRESPONDIENTE BRAZO Y MEDIOS DE CONEXION ELECTRICE AUTOMATICA. SE SUPERAN MEJOR LOS OBSTACULOS DEL TERRENO, TALES COMO PIEDRAS, DESNIVELES, ESCALONES, ETC.
CARRO AUTOMOTOR CON ROBOT.
(16/04/1997). Ver ilustración. Solicitante/s: JOBS S.P.A. G.D.S.P.A. Inventor/es: MUSELLI, ROBERTO, ORSI, GIANLUIGI, NERSI, ARMANDO.
CARRO AUTOMOTOR CON ROBOT. EL CHASIS DE DICHO CARRO PRESENTA UNA ALTA FLEXIBILIDAD A LA TORSION, DESTINADA A PERMITIR QUE EL CARRO SE ADAPTE A PISOS IRREGULARES. LAS RUEDAS DE ACCIONAMIENTO/FRENADO ESTAN MONTADAS EN PLACAS ARTICULADAS AL CHASIS DEL CARRO Y ESTAN SOMETIDAS A LA ACCION DE ELEMENTOS ELASTICOS DESTINADOS A MANTENERLAS PRESIONADAS CONTRA EL SUELO. LA INVENCION ES APLICABLE A ROBOTS INDUSTRIALES Y APARATOS ANALOGOS, CON LA FINALIDAD DE MEJORAR SU OPERATIVIDAD, EN PARTICULAR SU LIBERTAD DE MOVIMIENTO.
CARRO AUTOMOTOR CON ROBOT Y SISTEMA AUTOMATICO DE SUBSTITUCION DE BATERIAS.
(01/03/1997). Ver ilustración. Solicitante/s: JOBS S.P.A. G.D.S.P.A. Inventor/es: MUSELLI, ROBERTO, ORSI, GIANLUIGI, NERI, ARMANDO.
CARRO AUTOMOTOR CON ROBOT Y SISTEMA AUTOMATICO DE SUBSTITUCION DE BATERIAS. EL CARRO COMPRENDE DOS DISPOSITIVOS INDEPENDIENTES DE CARGA DE BATERIAS SITUADOS DE MODO QUE EL CARRO PUEDA AUTOPOSICIONARSE ENTRE ELLOS, ESTANDO PROVISTOS TALES DISPOSITIVOS DE ELEMENTOS CAPACES DE SACAR LAS BATERIAS DESCARGADAS POR UN LADO Y DE INTRODUCIR LAS BATERIAS CARGADAS POR EL LADO OPUESTO. LA INVENCION ES APLICABLE A ROBOTS Y MANIPULADORES CON LA FINALIDAD DE MEJORAR SU OPERATIVIDAD.
ROBOT DESPLAZABLE SOBRE PUESTOS DE TRABAJO FIJOS O MOVILES.
(01/02/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: DETRICHE, JEAN-MARIE.
LA INVENCION SE REFIERE A UN ROBOT MANEJABLE A PARTIR DE UN PUESTO DE TRABAJO FIJO O MOVIL, SIENDO ESTE ROBOT DESPLAZABLE, AL MENOS EN PARTE, DESDE EL PUESTO DE TRABAJO MOVIL SOBRE EL PUESTO DE TRABAJO FIJO , O VICEVERSA. EL ROBOT ESTA CONTROLADO POR EL USUARIO MEDIANTE UNA INTERFASE ROBOT/USUARIO UNIDA A MEDIOS DE EMISION/RECEPCION (13 Y 22) QUE ASEGURAN LA COMUNICACION DE INFORMACIONES ENTRE LOS DOS PUESTOS DE TRABAJO. SEGUN UNA VARIANTE DE LA INVENCION, EL ROBOT COMPRENDE UN ACOPLADOR QUE PERMITE ESTABLECER A LA VEZ CONEXIONES MECANICAS Y CONEXIONES ELECTRICAS ENTRE UNO DE LOS PUESTOS DE TRABAJO Y EL ROBOT. SEGUN OTRA VARIANTE DE LA INVENCION, EL ROBOT COMPRENDE UN MEDIO PORTADOR POSICIONADO PERMANENTEMENTE SOBRE UN PUESTO DE TRABAJO Y UN MEDIO MANIPULADOR QUE PUEDE SER DESPLAZADO DE UN MEDIO PORTADOR A OTRO MEDIO PORTADOR. LA INVENCION SE APLICA DE MANERA PARTICULAR AL CAMPO DE LA ROBOTICA DE AYUDA A LOS INVALIDOS, SIENDO ENTONCES EL PUESTO MOVIL UNA SILLA DE RUEDAS ELECTRICA.
(16/06/1995) ACTUADORES DE MATERIAL RIGIDO DE ACTUACION ELECTRICA DAN ARTICULACION A CORTADORES DE RAMAS ROBOTICOS. ACTUADORES PIEZOELECTRICOS POR EJ., PUEDEN SER USADOS EN VARIAS REALIZACIONES DE UNIONES ROBOTICAS PARA GIRAR UNA CONEXION ESFERICA O CILINDRICA O PARA TRANSLADAR UNA VARILLA. UNOS PARES OPUESTOS DE ACTUADORES ENGANCHAN EN UN MOVIMIENTO LENTO Y MANTIENEN SIEMPRE UN AGARRE TIPO PRENSA EN EL CORTADOR DE RAMAS ROBOTICO . LAS SUPERFICIES DE TRACCION DE LOS ACTUADORES CONECTAN CON EL ROBOT CON UNA CLARIDAD CERO. AL REVES DEL USO DE LOS COGINETES CONVENCIONALES LA CLARIDAD CERO Y EL CONTACTO DE TODA LA ZONA DOTA DE UNA RIGIDEZ MECANICA MUY…
MECANISMO DE LIBERACION UMBILICAL.
(16/05/1995) UN MOTOR LINEAL QUE SE PUEDE MOVER A LO LARGO DE UN ESTATOR SUSTANCIALMENTE PLANO (P). HAY ACOPLADAS UNAS FUENTES ACCIONADORAS ELECTRICAS, MECANICAS Y NEUMATICAS AL MOTOR LINEAL A TRAVES DE UN CORDON UMBILICAL (C). UN MIEMBRO DE PROTECCION CONTRA LOS TIRONES , NORMALMENTE ENLAZADO AL MOTOR LINEAL, ES ARRASTRADO POR EL MOTOR LINEAL A LA POSICION DESEADA A LO LARGO DE LA PLACA. EL MIEMBRO DE PROTECCION CONTRA LOS TIRONES SE DESACOPLA ENTONCES DEL MOTOR LINEAL Y ES MAGNETICAMENTE ATRAIDO (O POR VACIO) Y TEMPORALMENTE "FIJADO" A LA PLACA. UNA PORCION DEL CORDON UMBILICAL QUEDA SUJETA AL MIEMBRO DE PROTECCION CONTRA LOS TIRONES EN UN PUNTO INTERMEDIO…
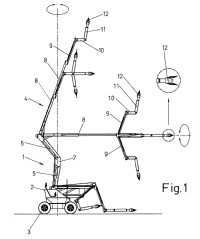
ROBOT MANIPULADOR DE GRAN DIMENSION Y DE CAPACIDAD FUERTE PARA LA UTILIZACION EN MEDIO ABIERTO.
(01/12/1993). Solicitante/s: POTAIN COMPAGNIE GENERALE DE BATIMENT ET DE CONSTRUCTION CBC. Inventor/es: GENDRAULT, MICHEL, ROCH, CHARLES ANDRE.
ESTE ROBOT ESTA DESTINADO A LA MANIPULACION DE CARGAS EN OBRAS DE CONSTRUCCION O EN OBRAS PUBLICAS. UN PORTADOR MOTORIZADO CONTIENE UN MASTIL ORIENTABLE Y UN BRAZO DESPLEGABLE Y REPLEGABLE ARTICULADO EN LA CIMA DEL MASTIL, Y REALIZADO EN VARIOS ELEMENTOS ARTICULADOS ENTRE SI. EL EXTREMO DEL BRAZO ESTA UNIDO POR UN ENLACE MOTORIZADO CON UN BRAZO COMPENSADOR MOTORIZADO TELESCOPICO Y ORIENTABLE, QUE POSEE AL MENOS UN GRADO DE LIBERTAD REDUNDANTE Y EQUIPADO DE UN PORTA PRENSOR DE DETECCION DE ESFUERZOS QUE SOPORTA UN PRENSOR UNOS MEDIOS DE ACCIONAMIENTO Y DE CONTROL ESTAN PREVISTOS PARA LA MOTORIZACION DEL PORTADOR DEL BRAZO COMPENSADOR Y DEL ENLACE , MIENTRAS QUE OTROS MEDIOS ALIMENTAN CON ENERGIA ACCIONAN Y CONTROLAN EL PRENSOR.
SISTEMA DE INTERVENCION EN LAS TUBERIAS PRIMARIAS Y EL DEPOSITO DE AGUA DE UN GENERADOR DE VAPOR EN UNA CENTRAL NUCLEAR.
(01/04/1993) EL INVENTO SE REFIERE A UN SISTEMA DE INTERVENCION EN EL DEPOSITO DE AGUA DE UN GENERADOR DE VAPOR DE UNA CENTRAL NUCLEAR. EL SISTEMA CONSTA DE UN PRIMER ELEMENTO CON UNA FORMA SENSIBLEMENTE ALARGADA Y QUE FORMA UN PRIMER BRAZO DEL SISTEMA, Y DE UN SEGUNDO ELEMENTO QUE TIENE FORMA TAMBIEN ALARGADA. ESTE ESTA ARTICULADO EN UNO DE SUS EXTREMOS A UNO DE LOS DEL PRIMER ELEMENTO . EL CONJUNTO DEL PRIMER Y SEGUNDO BRAZO ES SUSCEPTIBLE DE INTRODUCIRSE EN EL DEPOSITO (BAE) DEL GENERADOR DE VAPOR A TRAVES DE UN ORIFICIO DE ACCESO (TH). EL SEGUNDO ELEMENTO PUEDE COLOCARSE DESPLEGADO EN RELACION AL PRIMERO . UN VEHICULO QUE VA MONTADO MOVIL EN RELACION AL SEGUNDO BRAZO , PERMITE EXPLORAR Y GARANTIZAR LA DESCONTAMINACION DE LAS DIFERENTES PARTES DEL DEPOSITO (BAE) DEL GENERADOR DE VAPOR. UN ELEMENTO DE INTERVENCION,…
MEJORAS INTRODUCIDAS EN EL OBJETO DE LA PATENTE PRINCIPAL N{ P9002279 POR: "MANIPULADOR INDUSTRIAL.
(16/12/1992) MEJORAS INTRODUCIDAS EN EL OBJETO DE LA PATENTE PRINCIPAL N.G P9002279 POR: , SIENDO ESTE DEL TIPO QUE COMPRENDE UN AGARRADOR VINCULADO A UN PIE SOPORTE MEDIANTE UN BRAZO INTERMEDIO , Y EN EL QUE DICHO AGARRADOR Y BRAZO INTERMEDIO SON TELESCOPICOS, CARACTERIZADAS PORQUE LOS MISMOS SON ACCIONADOS MEDIANTE SENDOS MOTORES ELECTRICOS (29 Y 32) FIJADOS A ELLOS Y QUE, A TRAVES DE RESPECTIVOS HUSILLOS (30 Y 33), ACTUAN SOBRE SUS CORRESPONDIENTES ELEMENTOS DESPLAZABLES (10B Y 11B), ELIMINANDOSE DISPOSITIVOS NEUMATICOS QUE REQUIEREN UN CUIDADO Y COSTOSO MANTENIMIENTO, EFECTUANDOSE LOS RESPECTIVOS GIROS LATERAL DEL BRAZO Y ROTATORIO DEL AGARRADOR A TRAVES DE CORRESPONDIENTES JUEGOS DE PIÑONES Y CREMALLERA-PIÑON ACCIONADOS RESPECTIVAMENTE POR MOTOR ELECTRICO Y PISTON , REGULANDOSE VENTAJOSAMENTE EN ALTURA EL PIE SOPORTE MEDIANTE LA MANIPULACION…
DISPOSITIVO DE EXPLORACION Y/O TRATAMIENTO DE UNA SUPERFICIE LISA CURVADA.
(01/09/1992) LA INVENCION CONCIERNE A UN DISPOSITIVO DE EXPLORACION Y/O TRATAMIENTO DE UNA SUPERFICIE LISA CURVADA. EL DISPOSITIVO COMPRENDE UN ELEMENTO MOVIL CAPAZ DE MOVERSE SOBRE LA SUPERFICIE (S) SEGUN UNA TRAYECTORIA DETERMINADA, ESTANDO PROVISTO DE ELEMENTOS DE APOYO QUE SE DESPLAZAN EN RELACION AL CUERPO DEL ELEMENTO MOVIL . UN BRAZO SOPORTE DEL ELEMENTO MOVIL ES SOLIDARIO DE ESTE POR MEDIO DE UNA ROTULA DE ARTICULACION. EL BRAZO SOPORTE ESTA UNIDO EN LAS PROXIMIDADES DEL CENTRO DE CURVATURA (C) DE LA SUPERFICIE CURVADA (S). LOS EJES (D10,D11,D12,D13) DE LOS ELEMENTOS DE APOYO Y DEL BRAZO DE LOS DOS SOPORTES PUEDEN SER ORIENTADOS SENSIBLEMENTE COINCIDENTES EN…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}