ROBOT DE DESACTIVACION DE ARTEFACTOS EXPLOSIVOS MINAS Y MUNICIONES.
1. Robot de desactivación de explosivos, minas y municiones que siendo del tipo de ruedas (C),
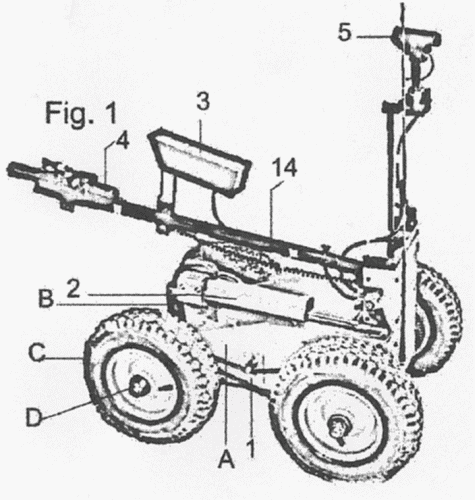
se caracteriza por estar constituido por un chasis (A) de acero inoxidable de forma rectangular con inclinación hacia arriba en su parte delantera baja y con inclinación hacia abajo en su parte delantera alta, al que se le atraviesan con barras redondas de acero inoxidable conformando de esta forma los ejes para la colocación de las ruedas (C) en cada uno de los laterales del chasis, las cuales son atacadas por medio de cadena de transmisión (13), que engrana en los piñones de cada uno de los motores y en las coronas dentadas (7) de cada una de las ruedas (C). Esta cadena (13) se encuentra tensada por medio de un tensor automático y manual (1) para cada uno de los lados del robot. El movimiento del robot se consigue mediante este sistema de una sola cadena de tracción (13) para cada uno de los laterales, la tracción es continua a todas las ruedas, tipo 4x4, los giros se consiguen mediante la tracción hacia delante de un lado y hacia atrás del lado contrario, de tal forma que el giro es proporcional a la velocidad de cada uno de los motores, este giro podemos decir que es del tipo tanque.
El robot dispone de brazos (14)(16)(21) para cada tipo de operación a realizar, además de pinza manipuladora (6) capaz de asir y manipular objetos con una gran precisión.
El movimiento de los brazos se consigue mediante la operación de un actuador lineal (2) al que se ancla una leva de elevación (10), que a su vez transmite el movimiento a la barra de sujeción (24) del brazo principal (12), y éste a su vez a los brazos (14)(16)(21).
Dispone de cañones disruptores (4) y de escopeta (9) para la efectiva desactivación de los distintos artefactos. Estos dispositivos (4)(9) son apuntados mediante la colocación de un visor (11) de retícula luminosa al que se le acopla una cámara para el correcto apunte a distancia.
También dispone de una pinza manipuladora (6) a la que se acopla una cámara, que consigue del robot una herramienta capaz de manipular a distancia objetos con gran precisión.
Dispone de cámaras (3)(5) para el correcto manejo a considerables distancias de todo el sistema, visionando las imágenes que se envían a través del módulo de transmisión (8) en el monitor TFT (29).
Tanto el robot como los dispositivos operativos, son mandados a distancia mediante el maletín de mando con control remoto (27), mediante radiofrecuencia con modulación PPM/PCM. En el maletín de mando se dispone del receptor de video audio (28) que recibe las señales mediante radiofrecuencia, y del monitor TFT (29).
El telemando (27) se encuentra dispuesto en una caja plástica en la que se han colocado todos los dispositivos electrónicos, en el exterior se han dispuesto los mandos de los brazos (30) y el de control de movimiento del robot (30), así como los interruptores de control de mando de cámaras, de mando de la pinza manipuladora (6) e interruptor de disparo, consiguiendo éste último mediante la utilización de distintos dispositivos electrónicos una seguridad extrema frente a posibles disparos fortuitos, de tal forma que es necesario armar el sistema mediante un selector, antes de poder efectuar el disparo.
Tipo: Resumen de patente/invención.
Solicitante: COSTERO CORTON,VICENTE MIGUEL.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: COSTERO CORTON,VICENTE MIGUEL.
Fecha de Solicitud: 11 de Agosto de 2003.
Fecha de Publicación: .
Fecha de Concesión: 20 de Agosto de 2004.
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- F42B33/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F42 MUNICIONES; VOLADURA. › F42B CARGAS EXPLOSIVAS, p. ej. PARA VOLADURA; FUEGOS ARTIFICIALES; MUNICIONES (composiciones explosivas C06B; espoletas para municiones F42C; voladura F42D). › F42B 33/00 Fabricación de municiones; Desmontaje de municiones; Aparatos para ello (F42B 5/188 tiene prioridad; procedimientos de fabricación de cargas huecas F42B 1/036; fabricación de iniciadores para cartuchos de voladura F42B 3/195). › Desmontaje de espoletas, de cartuchos, de proyectiles, de cohetes o de bombas (F42B 33/04 tiene prioridad).
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo, del 1 de Enero de 2020, de SAUDI ARABIAN OIL COMPANY: Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende: […]
Fabricación de producción ultraflexible, del 13 de Noviembre de 2019, de ABB SCHWEIZ AG: Un sistema de fabricacion que comprende: una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos […]
Aparato de distribución de carga de rueda magnética, del 21 de Agosto de 2019, de Tas Global Co., Ltd: Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende: una pluralidad de ruedas magnéticas para […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]