EQUIPO DE COLOCACIÓN DE PINES BRAILLE EN LETREROS DE INFORMACIÓN Y SU PROCEDIMIENTO DE FUNCIONAMIENTO.
El equipo preconizado incorpora un robot de tipo móvil capacitado para realizar el taladrado tanto en materiales semi-blandos,
como materiales de dureza extrema, para posteriormente insertar unos pines que presentan una superficie adecuada a los caracteres braille y por tanto puede ser leída por personas invidentes. Se añade la ventaja de ser un sistema automatizado pero no solo en taller sino en el mismo punto donde están colocados los letreros, con la particularidad ventaja de no tener que desmontar los letreros donde están colocados si se quiere aprovechar los mismos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030132.
Solicitante: INGENIERIA DE APLICACIONES, S.A..
Nacionalidad solicitante: España.
Inventor/es: SERIOLA RODAS,MIQUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- G09B21/00 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › Medios de enseñanza o de comunicación destinados a los ciegos, sordos o mudos (presentación sonora del objeto a estudiar G09B 5/04).
- G09B21/02 G09B […] › G09B 21/00 Medios de enseñanza o de comunicación destinados a los ciegos, sordos o mudos (presentación sonora del objeto a estudiar G09B 5/04). › Dispositivos para la escritura Braille.
Fragmento de la descripción:
"EQUIPO DE COLOCACIÓN DE PINES BRAILLE EN LETREROS DE INFORMACIÓN Y SU PROCEDIMIENTO DE FUNCIONAMIENTO"
Objeto de la Invención.
Más concretamente la invención se refiere a un equipo de colocación de pines braille en todo tipo de letreros, con independencia del material en el que han sido construidos, las adaptaciones y elementos
complementarios que permiten dicha colocación, y el procedimiento de funcionamiento de dicho equipo Estado de la técnica. Existen en el mercado distintos sistemas para la producción en una superficie cualquiera de caracteres en braille, siempre que dicha superficie sea metálica, laoperación principal es la "embutición" mediante los correspondientes útiles, sin embargo dichos sistemas quedan limitados a los materiales de tipo metálico, como chapa de hierro, de acero inoxidable, aluminio y similares, por tanto no puede aplicarse este sistema a otros materiales como madera hormigón, plástico y otros.
En otros sistemas se adhiere sobre la superficie una tira de material principalmente plástica con los caracteres braille producidos sobre la misma, sin embargo esta tira al solidarizarse sobre una superficie, la del letrero de cualquier material, tiene el inconveniente de estar sometida a acciones vandálicas que determinan su separación de dicha superficie y por tanto exigen una labor de restauración periódica.
En todos estos sistemas descritos si bien puede automatizarse la producción de caracteres braille en un taller o fábrica y con ello alcanzar una gran productividad tiene los inconvenientes señalados anteriormente, y tiene la limitación que no son sistemas operativos en cualquier material salvo el segundo, sin embargo este segundo sistema no ofrece una garantía de continuidad, incluso puede destruirse la lámina de material plástico o similar mediante un simple mechero o bien con objetos cortantes.
Finalidad de la Invención.
Automatizar el sistema de colocación de pines pudiendo ser incluso utilizado en el propio lugar donde está colocado el letrero, y posibilitar el que ser puesto en práctica sobre cualquier superficie
(material) , incluyendo materiales de todo tipo que no permiten el sistema de embutición.
Existen sistemas automáticos de colocación de pines pero no "in situ", por lo que el sistema que la invención preconiza añade la ventaja de ser un sistema automatizado pero no solo en taller sino en el mismo punto donde están colocados los letreros, con la particularidad de no tener que desmontar los letreros donde están colocados si se quiere aprovechar los mismos.
Descripción de la Invención.
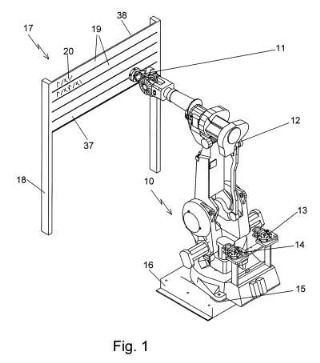
El equipo preconizado incorpora un robot de tipo móvil capacitacto para realizar el taladrado tanto en materiales semi-blandos, como materiales de dureza extrema, para posteriormente insertar unos pines que presentan una superficie adecuada a los caracteres braille y por tanto puede ser leída por personas invidentes.
El robot utilizado es uno de los llamados móviles y de seis ejes, controlado el mismo mediante un joy stik, conectará con un sistema informático, que transformará las palabras introducidas mediante escritura normal con puntos en tres dimensiones, para que el robot pueda localizar las coordenadas del robot, su posición, y a partir de este momento realizar la operación de taladrado, y colocación de los pines, intercalando la operación de limpiado del orificio practicado y el
suministro de material adherente para el pin no pueda ser violentado por desaprensivos.
El robot está apoyado sobre una estructura tubular con ruedas para facilitar su movilidad en las zonas donde se realizará la aplicación. A su vez dicho robot incorpora sendos sistemas de fijación al pavimento, y sistemas de nivelación y alineado con un sistema de visión con la disposición de los letreros a trabajar.
Así mismo el robot incorpora una mano con un cambio rápido que permite cambiar de herramienta cuando el sistema se lo indica, pudiendo realizar el trabajo de taladrado y colocación de pines en una superficie, la del letrero, mediante un sistema accionado eléctricamente que controlará las revoluciones de giro para adecuar el tipo de material a la herramienta de corte, de esta forma, se logra un taladro completamente cilíndrico y de precisión preparado para el siguiente proceso.
Una vez finalizada la tarea de taladrado, el mismo robot aplicará un chorro de aire para limpiar de posibles impurezas y suciedad el taladro correspondiente y dejándolo reparado para que el siguiente proceso de colocación de pines, pueda incorporar el adhesivo correspondiente y su relación sea lo más eficaz posible.
Para la colocación de pines de braille el robot al
tener capacidad de memorizar los datos de las posiciones en las tres coordenadas X, Y, y Z, repite el proceso en este caso con el auxilio de una pistola automática de colocación de pines.
Los pines correspondientes son almacenados en una pequeña tolva anexa al robot que este dosificará de uno en uno para que la pistola pueda clavar en el agujero realizado en el anterior proceso.
Cada pin, al pasar por la zona de entrada al letrero se le aplicará una pequeña cantidad de adhesivo para solidifique con el taladro en el letrero y así se evita que pueda sacarse mediante un punzón torna vis o similar.
Así mismo el mismo robot tendrá la posibilidad de realizar una vez se ha realizado el taladro un pequeño desbarbado y/o pulido por la parte posterior de la superficie del letrero para dejar la zona donde se ha taladrado sin rebabas y completamente lisa.
La muñeca del robot incorporará un cambio rápido de herramientas que permite efectuar con total precisión el cambio de tres herramientas que incorpora, es decir, la herramienta de taladrado, la herramienta de colocación de pines y la herramienta de pulido.
Las herramientas estarán colocadas sobre unas fijaciones almacén que estará ubicadas en la parte inferior del robot, incorporarán un sensor magnético para identificar y determinar que herramienta está en su lugar y bien almacenada en cuanto a posición tridimensional en el espacio.
Cada herramienta, estará gobernada por un equipo de sensores de control que unido al sistema electrónico
principal podrá dialogar constantemente tanto con el
robot como todos los periféricos del sistema.
La herramienta de taladrado está compuesta por la unidad de cambio rápido ubicada en su parte inferior y pilotada reumáticamente para unirse o separarse de la parte fija que lleva el robot. Todo el sistema está conectado eléctricamente con el equipo principal de la instalación.
El taladro en si es un equipo de taladrado con variador de velocidad electrónico que en función del
tipo de material a taladrar se adaptan a las revoluciones correspondientes para que el sistema también avance en profundidad. La herramienta de colocación de pines estácompuesta básicamente por tres sistemas independientes pero conjugados, el primero es el equipo de vibración y alimentador de pines que realiza la misión de entregar a la zona de paso a paso cada uno de los pines y posicionados con la parte cóncava en posición correcta antes de ser entregado al sistema de empuje.
El segundo sistema es la zona de empuje del pin, este sistema está compuesto por un cilindro neumático empujador que mediante una cabeza fija de acero se adapta al pin a introducir, esto permite que no se deforme el pin en el momento de introducirlo, todo el sistema está controlado por el sistema electrónico principal que dialoga constantemente con dicho sistema e informa de cualquier anormalidad que pudiera sufrir cada uno de los elementos.
El tercer sistema es el de la zona de mini pulverización con adhesivo que permitirá a los pines
quedar asentados en la zona donde el empujador les...
Reivindicaciones:
7 a -"EQUIPO DE COLOCACIÓN DE PINES BRAILLE EN LETREROS
DE INFORMACIÓN Y SU PROCEDIMIENTO DE FUNCIONAMIENTO" según la 1º y 6a reivindicaciones caracterizado en que el vibrador (30) de pines (24) dispone de una entrada
(31) de aire a presión para empujar a los mismos (24)
por la manguera (32) hasta el equipo empujador clavador 10 (35) .
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo, del 1 de Enero de 2020, de SAUDI ARABIAN OIL COMPANY: Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende: […]
Fabricación de producción ultraflexible, del 13 de Noviembre de 2019, de ABB SCHWEIZ AG: Un sistema de fabricacion que comprende: una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos […]
Aparato de distribución de carga de rueda magnética, del 21 de Agosto de 2019, de Tas Global Co., Ltd: Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende: una pluralidad de ruedas magnéticas para […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]